1-10KW级质子交换膜燃料电池冷却系统的建模
2010-10-20阮庆洲余晴春胡鸣若
阮庆洲,余晴春,胡鸣若
0 引言
燃料电池发电系统中,对于小功率的电堆(比如小于1kW的电堆),可以采用风冷的方式进行冷却,但对于大功率的电堆,风冷就显得无能为力了,水冷成为首选了。采用水冷的方法,冷却水的温度及流量,都将对电堆的性能产生很大的影响,因此,设计一个能很好控制冷却水温度的控制系统就显得很重要了。水循环控制系统是一个典型的惯性带有滞后的控制系统,传统的 PID控制虽然在工业生产中用得相当的普遍,但对于这个具有大滞后、非线性的系统,常规PID控制很难保证其控制效果始终处于最佳状态。另外,由于模糊控制不需要精确的数学模型,是一种基于规则的控制,可依据操作人员的控制经验以及专家知识,通过查表就可以得到控制策略,实现简单。
1 控制要求
我们的水循环系统的硬件如图1所示,K为一个三通水阀,1和2是两个进水口,通过水阀不同的转角来调节 T6的温度,水阀的转角范围是0到90度,0度时,进入电堆的冷却水全部来自于管道2,冷却水温度低,90度时,进入电堆的冷却水全部来自于管道1,冷却水温度高。

图1 水循环控制示意图
一般情况下,电堆冷却水的进口温度 65°C ≤T≤ 75°C 且
6差值T7- T6约为2~3°C
2 确定输入量的论域及模糊参考集
设

ΔT0为期望的差值,ΔT与ΔT0的偏差为e,即

e的最大变化范围 e∈ [emin, emax],将 e乘上比例因子k1,使得 k1e∈(-3,+3)为一个标准范围;将k1e适当的划分为若干的区间,划分为7个值(如图2)。量化后的k1e记为E。

以E为论域,在该论域上定义语言值集F(E)。现取如下5个语言值:“负大 NB、”负小NS”、“零O”、“正小PS”、“正大 PB”, 即

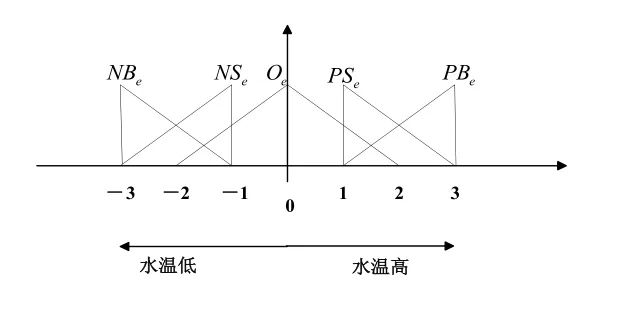
图2 输入量模糊参考集图
由于论域是有限的离散值,则同样可得到如下的偏差变量的隶属度表1。

表1 输入隶属度表
3 确定控制量的论域及模糊参考集
控制量是水阀转角的度数,水阀转角为 0°时,进入电堆的冷却水水温低,既T6小,水阀转角为 90°时,进入电堆的冷却水水温高,既 T6大。水阀转角 u'∈[0°,90°],设u =u'-45°,则 u∈[-45°,45°],乘上比例因子k2,使k2u有一个标准变化范围: k2u∈[-4,+4]。将k2u角度变化量化为9档,记为U

以U为论域,控制语言值取5个,得到模糊参考集

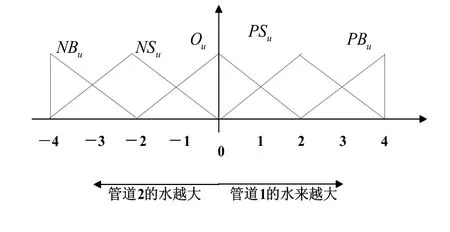
图3 控制量模糊参考集图
控制量的隶属函数见表2。
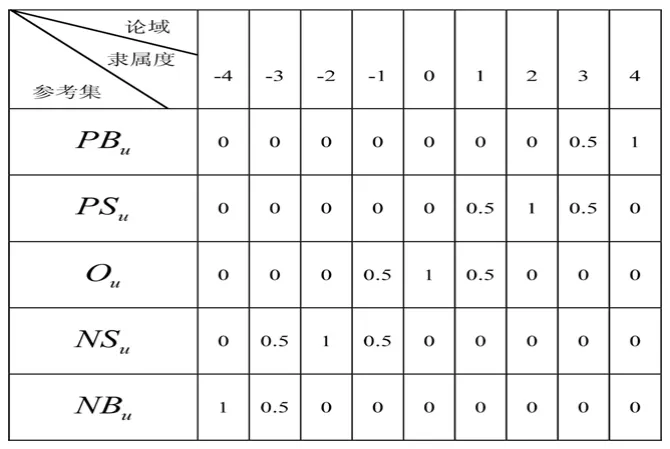
表2 控制量隶属度表
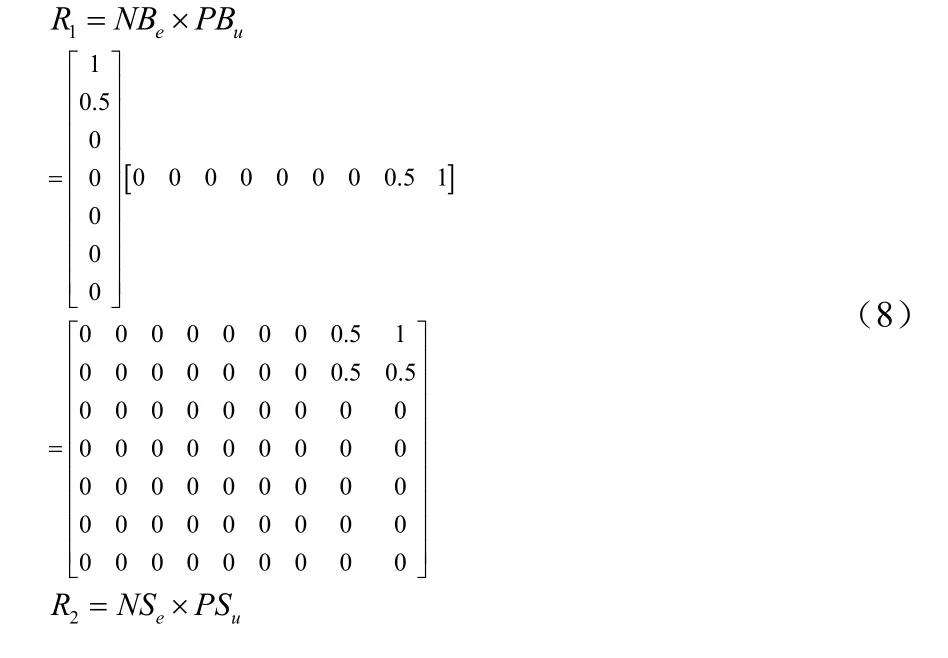
4 确定模糊关系矩阵
依据以前的控制经验,可得到下表的控制规则(见表3):
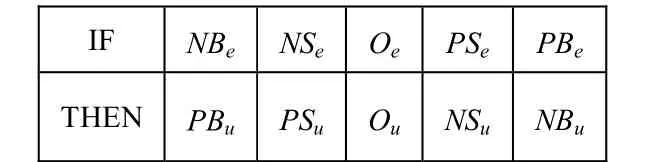
表3 控制规则(专家经验)
一个规则ri可以得到一个关系矩阵 1,2...5,i=Ri
总的控制关系

求关系矩阵Ri:
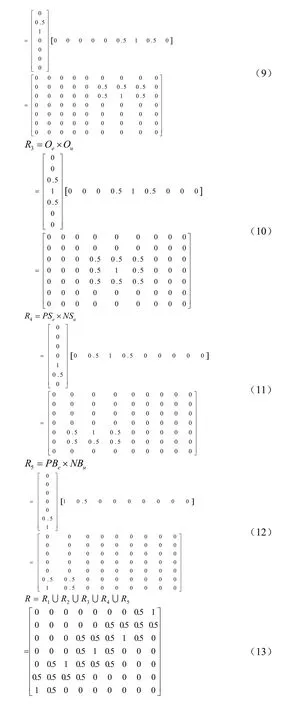
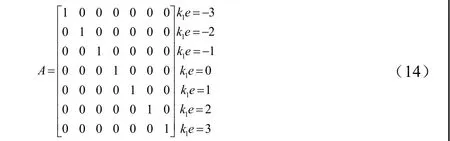
5 求出输出决策矩阵B
现在,对输入e,分别令k1e等于-3、-2、-1、0、1、2、3,求出输出决策B。下面构造一个输入模糊集合。
求输出决策B
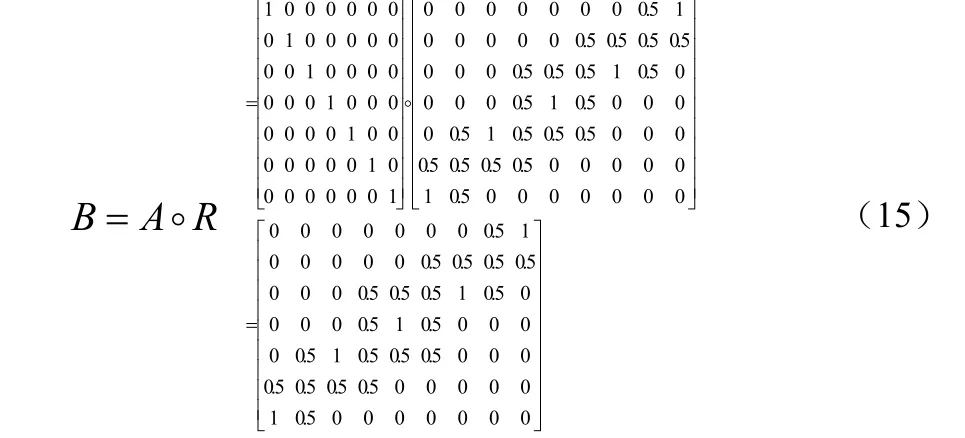
为了实际的需要,我们需要做出判决,对上面的输入,求出对应的输出,并把他做成一个查询表。利用下面公式计算控制输出值:

当 k1e=-3时, B1j=[0,0,0,0,0,0,0,0.5,1];(B1j表示B矩阵的第一行)

同理
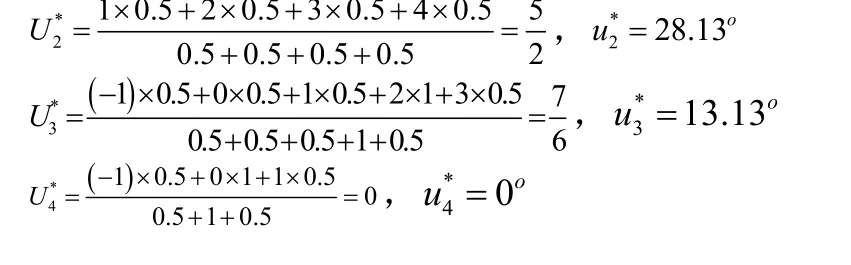
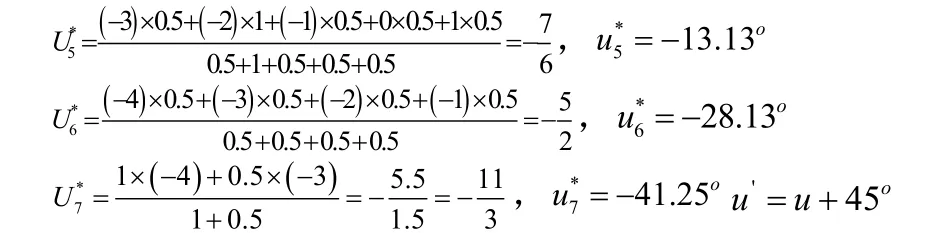
所以,我们得到对应的 u'*

6 结论
通过上面的讨论,对于不同的输入,可以得到下面一个模糊查询表(表4)

表4 模糊查询表
我们从上面的设计可以看出,采用模糊控制,可以大大简化很多中间环节,设计者不需要建立精确的数学模型,只需要具备一定的经验和熟悉控制要求,就能设计出比传统PID控制更完美的控制系统。
[1]徐军.动态模糊神经网络—设计与应用[M].北京:清华大学出版社,2008.
[2]章卫国.模糊控制理论与应用[M].西安:西北工业大学出版社,1999.
[3]藤田信雄,近藤俊行.燃料电池冷却系统及控制燃料电池中冷却液的循环的方法[P].中国申请号/专利号:200480018410,2008.
[4]张立炎,潘牧,全书海.质子交换膜燃料电池系统建模和控制的综述[J].武汉理工大学学报:信息与管理工程版,2007,29(4).