面向对象的L iDAR数据多特征融合分类
2010-09-28隋立春
杨 耘,隋立春
(长安大学地质工程与测绘学院,陕西西安 710054)
面向对象的L iDAR数据多特征融合分类
杨 耘,隋立春
(长安大学地质工程与测绘学院,陕西西安 710054)
针对单源遥感数据分类精度不高的问题,提出一种基于多特征融合的面向对象分类方法。该方法利用LiDAR点云数据的高程信息,并融合地物粗糙度特征,以及航空影像的地物光谱、形状和上下文信息等多种特征,再基于 SVM分类器构建面向对象的分类方法,以提高城区环境下遥感数据分类的可靠性。试验表明,该方法可有效地提高城区地物的分类精度,且分类结果更符合人的视觉认知规律。
航空激光雷达;面向对象分类;数字高程模型;粗糙度;多特征融合;支持向量机
一、引 言
运用多传感器集成技术进行土地利用/覆盖分类是国土资源调查、环境监测、城市规划等领域的研究热点。而利用航空激光雷达(LiDAR)数据辅助高分辨率影像进行土地利用/覆盖状况分类是一个非常有效的途径。近几年,国内外学者针对不同问题,已开展了很多相关研究。其中,文献[1]研究了融合高分辨率影像与 L iDAR点云数据提取城区建筑物的方法;文献[2]针对机场安全问题,综合利用真彩色和彩红外航空影像,以及LiDAR点云数据自动提取机场的建筑物等障碍物。张小红等[3-4]也开展了LiDAR技术的理论与工程应用研究,取得了诸多研究成果。这些研究表明,LiDAR技术能快速准确地获取地物高程信息,而高空间分辨率的遥感影像(如 SPOT5、IKONOS、QuickBird影像等)具有高几何分辨率和丰富的光谱信息,两者优势互补,对土地利用/覆盖状况分类的精度有很大提高。另外, LiDAR点云数据除可以提取地物高程信息之外,还可导出地物强度、粗糙度、坡度等更多的衍生特征,将这些特征有机集成,同时充分利用影像数据中地物的光谱、几何、上下文特征,可以大大降低地物分类的不确定性,提高分类精度。
而对于如 Geoeye、IKONOS、QuichBird等高空间分辨率遥感影像,面向对象的分类是一类非常有效的方法。此外,支持向量机 (SVM)分类器[5]在高分辨率影像分类中得到了应用,不少研究[6]已表明,SVM分类器比其他同类分类器表现出更佳的分类性能。
目前,国内 LiDAR数据的获取成本较高,有时难以同时获取同一地区的影像数据及点云数据。另一方面,随着城市化进程的加快,利用 LiDAR技术快速准确地进行城区地物信息的提取对城市规划等应用有着非常重要的作用。在此背景下,本文提出了利用 LiDAR点云数据以及同时获取的航空影像,基于多源特征融合的思想,构建了一种基于SVM分类器的面向对象的分类方法、技术,以缓解单一数据源情况下遥感数据分类的不确定性,提高城区土地利用/覆盖分类精度。
二、面向对象的L iDAR数据分类
本文方法的技术流程图如图 1所示。
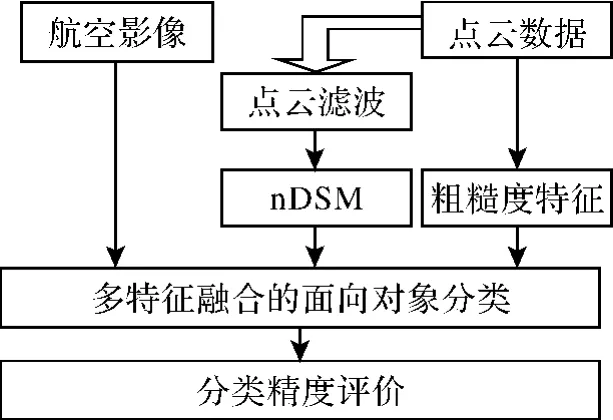
图1 本文方法技术流程图
具体细节如下:
1.点云数据的特征提取
LiDAR离散点云数据经过滤波处理后,滤除噪声和房屋、树等高出地形表面的非地面点云,保留地面点,并经过高程内插,便可以获取高精度的数字高程模型(DEM)。因此,滤波算法的好坏对DEM精度有很大影响。
基于不同的原理及假设,国内外学者先后提出了很多种点云滤波的方法[5]。根据研究区域的地形及地物特点,本文采用迭代多项式拟合滤波方法(iterative polynomial fitting filter),该方法不是直接滤除非地面点来达到分离地面点与非地面点的目的,而是从原始点云数据中直接迭代地识别地面点。
对滤波后的点云,需要对空洞区进行高程内插得到DEM。但是,DEM包含了地形起伏的信息,无法直接反映地物的高度信息。因此,本文采用归一化数字表面模型 (nDS M),即由数字表面模型(DS M)与DEM进行代数差运算后得到的数据 (即DS M-DEM),这样 nDS M可直接反映地物的高度信息,大大缓解了地形起伏的影响。这种处理更适于地形起伏变化剧烈的地物覆盖区。
为了后续的分类处理,必须将DEM、DS M以及nDS M与航空影像进行配准,从而将多数据源的空间位置相互关联。本文采用了二次多项式法利用测区已有的控制点进行配准,配准后航空影像的空间分辨率重采样到 1 m。
由LiDAR点云数据可以提取 nDS M这一特征,能够提取不同高度的建筑物及树,但仍难以鉴别高度相近、但粗糙度不同的房屋与树,通常情况下,树比房屋、地面等平坦地物更粗糙。因此,本文还提取了粗糙度特征(粗糙度用每个格网内所有高程点的标准偏差大小来描述),以提高房屋与树的识别能力。
2.面向对象的多特征融合分类
由于L iDAR可以提取高分辨率的DE M数据,因此其衍生特征均具有高分辨特性。而航空影像的光谱信息有限,但空间信息丰富,同时蕴含着地物的尺寸、形状及上下文关系等特征,若能将上述特征充分加以综合利用,则可以改善分类精度。因此,本文将nDS M与粗糙度这两个点云数据的衍生特征与航空影像形成多维矢量数据,采用了基于分割后再分类的面向对象的分类技术,实现特征空间的类别划分。
面向对象的分类方法中,分类是以分割为基础,即先将图像划分成多个同质区域对象,然后以对象为分类单元再进行分类。因此,地物的光谱、高度、纹理、尺寸、形状及相邻地物间的关系都得到很好地反映及利用,从而克服了传统的基于像素分类方法中无法对相同语义特征的像素集合进行识别的不足。而对于高分辨率影像而言,单一像素分类毫无意义。因此,面向对象的分类思想使得分类结果更符合人的视觉认知规律。
而 SVM分类器无须特征空间正态分布的假设,且核函数空间的映射更适合多维的空间特征输入,模型复杂度与输入特征维数无关,这使得输入特征可以多元化,从而核函数将输入特征映射到高维空间可能产生原始数据所不具备的新特征。
基于以上考虑,本文采用了 eCognition软件包中的多分辨率分割方法,取得某一合适尺度下的分割结果。然后利用 SVM分类器进行分类,分类原理参见文献[1-2]。并将这种基于分割的 SVM分类视为一种面向对象的分类技术,从而将基于像素的 SVM分类提升到基于对象的分类。
三、试验分析
为了验证本文方法的有效性,我们以 2007年Leica ALS 40获取的中国某地的L iDAR点云及真彩色航空影像作为测试数据,选取了其中的两个场景。
1.试验一
图 2(a)为航空影像数据,图 2(b)为原始 Li-DAR点云数据的 3D渲染图。图 2(b)所示研究区域中,LiDAR点云个数为 101 933,点云密度平均为1个 /m2。该区域为城区。
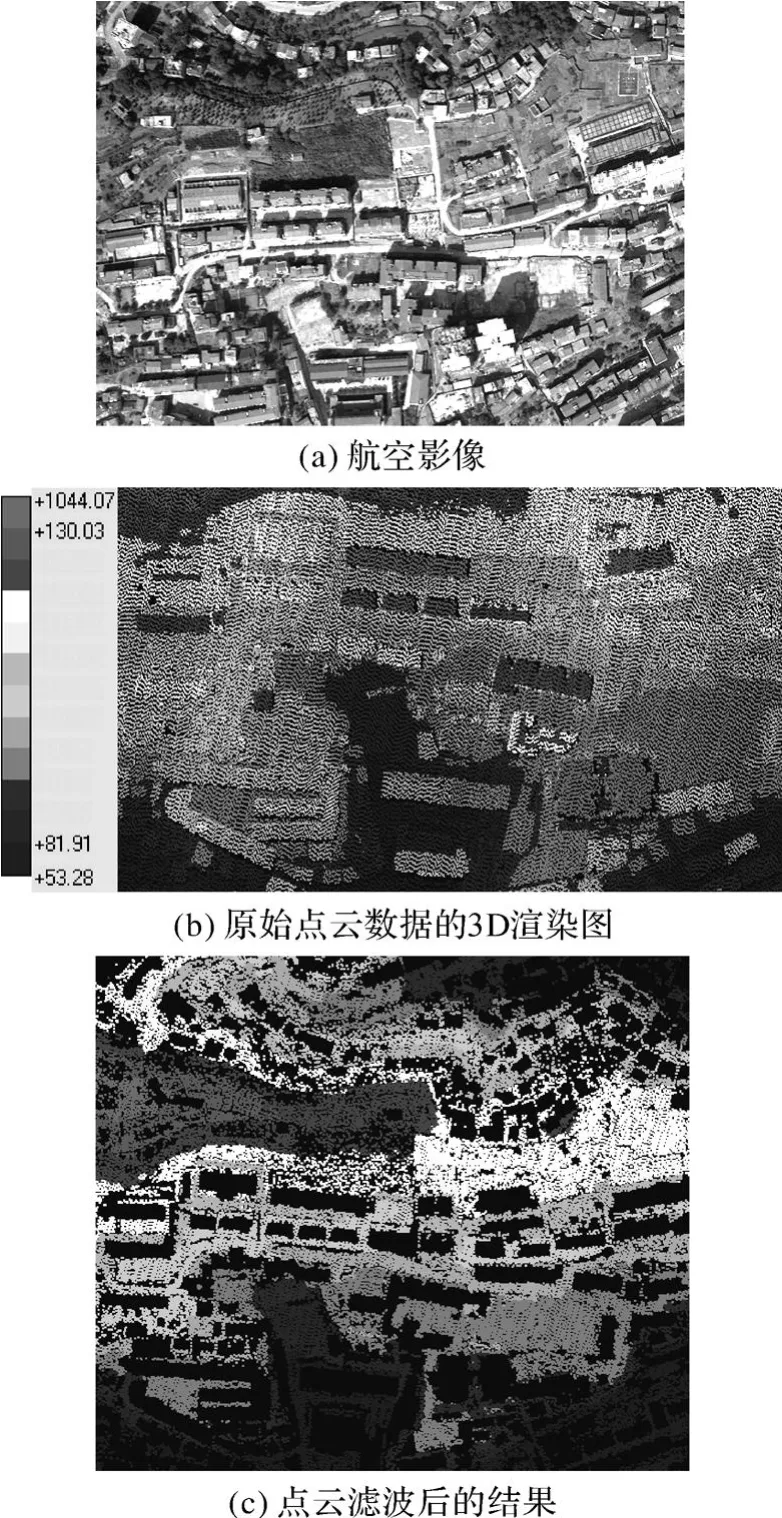
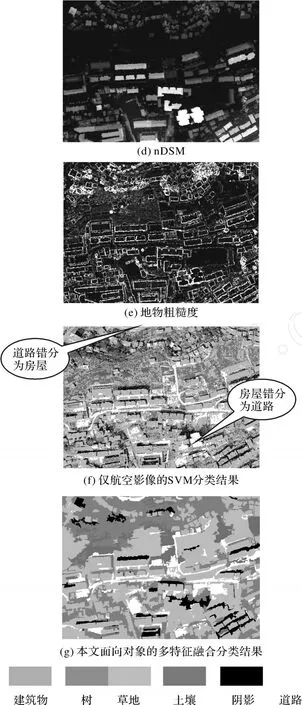
图 2 试验数据、提取的特征及分类结果比较
图 2(c)、(d)、(f)所示的是滤波后点云、nDS M以及粗糙度特征。从图 2中可以看出,(b)能够更清楚地描述地物的高度信息,(c)反映了地物的粗糙程度,有助于识别相近高度但不同粗糙度的地物,如房屋与树。
从图 2(f)可以看出,采用 SVM分类方法对单源航空影像的分类结果表明:由于高空间分辨率影像中光谱异质现象极其严重,细部特征明显等特点,会出现“椒盐式分类”现象,如房屋、树等主要地物类型中出现许多离散的、不连续的小区域,不利于矢量化,需要费时的人工后处理。
而图 2(g)表明:当融合了地物的高度信息和粗糙度特征后,大大降低了图 2(f)中建筑物、树这两类地物的错分现象;当采用了面向对象的分类方法后,大大缓解了分类“噪声”,使分类结果更符合人的视觉认知规律。
分析原因如下:从特征选择的角度来分析,SVM分类器对单一数据源的航空影像分类,由于没有融合地物的高程、粗糙度特征而会导致城区房屋这类光谱异质极其严重的地物仍会出现混分现象;从分类方法的角度来分析,尽管在样本选取合适的情况下,SVM分类器对光谱异质现象有一定的鲁棒性,但是,SVM这类分类器本质上仍是以单个像元为单元,没有充分利用影像的几何、空间信息,仍无法完全避免光谱异质及细节的影响。而本文的面向对象分类方法可以有效解决这一问题。
2.试验二
图 3(a)、(b)所示场景中,L iDAR点云个数为518 089,有一定程度的地形起伏。
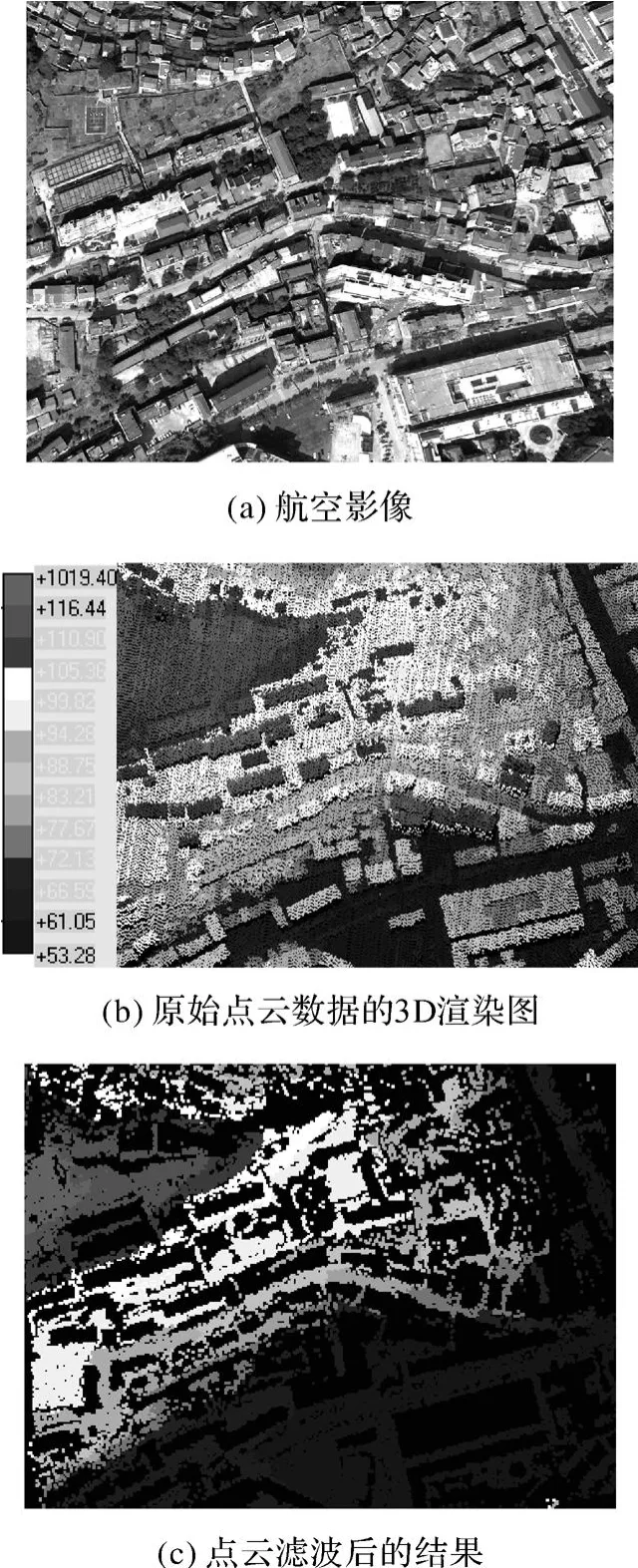
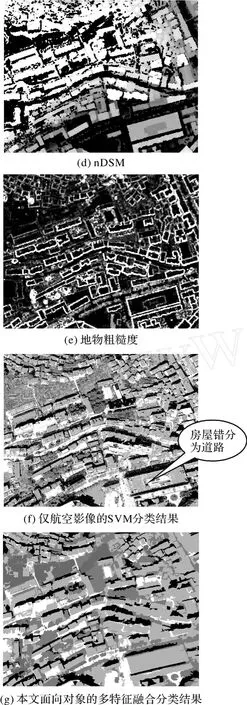
图 3 试验数据、提取的特征及分类结果比较
从图 3所示的试验结果 (图例与图 2相同),我们可以得出与图 2相同的结论。
为了定量评价本文方法的性能,本文通过对高空间分辨率航空影像的目视识别方式进行研究,确定了测试区的参考样本。对试验中测试数据,分别对单源航空影像以及融合了点云数据的航空影像依次采用 SVM分类法,以及本文所提出的面向对象的分类法进行分类结果对比。结果表明:通常情况下,本文分类方法的总分类精度比单源航空影像的SVM分类结果高出 3%~7%(这取决于样本选取的好坏及分割尺度选取的优劣),表明本文建议的分类方法的确有利于分类精度的提高。
此外,对面向对象的分类方法来说,分类结果的优劣在很大程度上取决于分割尺度。因此,最佳分割尺度的选择对分类结果有很大影响。
四、结束语
本文利用LiDAR点云数据和航空影像,融合两种数据源的多个特征,基于 SVM分类器构建了一种面向对象的分类方法,以降低单一数据源地物分类中的不确定性。其中,利用L iDAR点云数据衍生的地物高度特征以及粗糙度特征,并与航空影像数据特征有机融合,采用面向对象的分类技术对该多维特征进行地物类别划分。这种方法充分利用了地物的光谱、纹理、高程、几何、上下文信息等多个特征,有效降低了分类的不确定性,提高了分类精度,也为分类结果向 GIS数据转化提供了便利。
[1] SOHN G,DOWMAN I.Data Fusion of High-resolution Satellite Imagery and LiDAR Data forAutomatic Building Extraction[J].Journal of Photogrammetry and Remote Sensing,2007,62(1):43-62.
[2] DEM IR N,POL I D,BALTSAV IA S E.Extraction of Buildings and TreesUsing Images and LiDAR Data[J]. The International Archives of the Photogrammetry,Remote Sensing and Spatial Information Sciences,2008, XXXV II(B4):313-318.
[3] 张小红.机载激光雷达测量技术理论与方法[M].武汉:武汉大学出版社,2007.
[4] 徐祖舰,王滋政,阳锋.机载激光雷达测量技术及工程应用实践[M].武汉:武汉大学出版社,2009.
[5] VAPN IK V.Support-vector-machines[EB/OL].[2010-01-10],http:∥www.support-vector-machines.org.
[6] 黄昕,张良培,李平湘.基于多尺度特征融合和支持向量机的高分辨率遥感影像分类 [J].遥感学报, 2007,11(1):48-54.
Object-oriented Classification of L iDAR Data Based on M ulti-feature Fusion
YANG Yun,SU ILichun
0494-0911(2010)08-0011-04
P237
B
2010-02-08
国家自然科学基金资助项目(40971306)
杨 耘(1975—),女,新疆沙湾人,博士,讲师,主要从事模式识别、激光雷达数据和遥感图像处理研究。