船载测控雷达无塔角度标校新方法
2010-09-26
(中国卫星海上测控部,江苏 江阴 214434)
1 引 言
大型船载精密测控雷达系统跟踪接收机的方位、俯仰交叉耦合及定向灵敏度的精确标定,是保证雷达完成目标捕获及稳定跟踪的必要前提。为了确保海上测控任务中船载测控雷达系统能捕获目标并具有良好的跟踪性能,船载测控雷达跟踪接收机系统方位、俯仰必须具有良好的拉偏线性度,即方位、俯仰的交叉耦合度要小,且方位、俯仰定向灵敏度大小在合适范围,这就必须对跟踪接收机进行角度标校[1]。船载测控天线跟踪接收机无塔动态角度标校有多种方法,目前提出的副面馈电角度标校法是一种利用在天线副反射面增加多个下行信号耦合器模拟信号相对于馈源喇叭形成方位、俯仰正反偏置从而实现角度标校的方法。该方法得以实现的前提是在副面安装的信号耦合器必须精确定位,但在实际工程运用中由于天线实际安装时副面与馈源喇叭的空间几何位置较理论设计存在不同程度的偏差,因此耦合器精确定位相当困难。基于这些矛盾,本文提出了一种特殊情况下的副面馈电角度标校理论,通过在天线副反射面任意位置设置信号耦合器来模拟目标完成天线单点频无塔动态角度标校,并采用查表法及自动校相辅助法等方法完成雷达工作频段内不同频点的角度标校。
2 角度标校原理
为确保船载测控天线(本文仅研究双通道单脉冲跟踪体制天线)能够及时捕获并稳定跟踪目标,必须对天线跟踪接收机的和、差链路相位及增益进行调整和标定,使接收机和、差链路的传输相位差ΔΦ=0°,且链路增益K为一合适的值,即接收机角度标校。
双通道单脉冲跟踪体制的天线跟踪工作原理如图1所示,当天线电轴偏离目标θ角时,天线馈源将产生差模信号经跟踪接收机解调出方位、俯仰误差电压,将误差电压送伺服跟踪位置环完成对空间目标的闭环跟踪[2]。
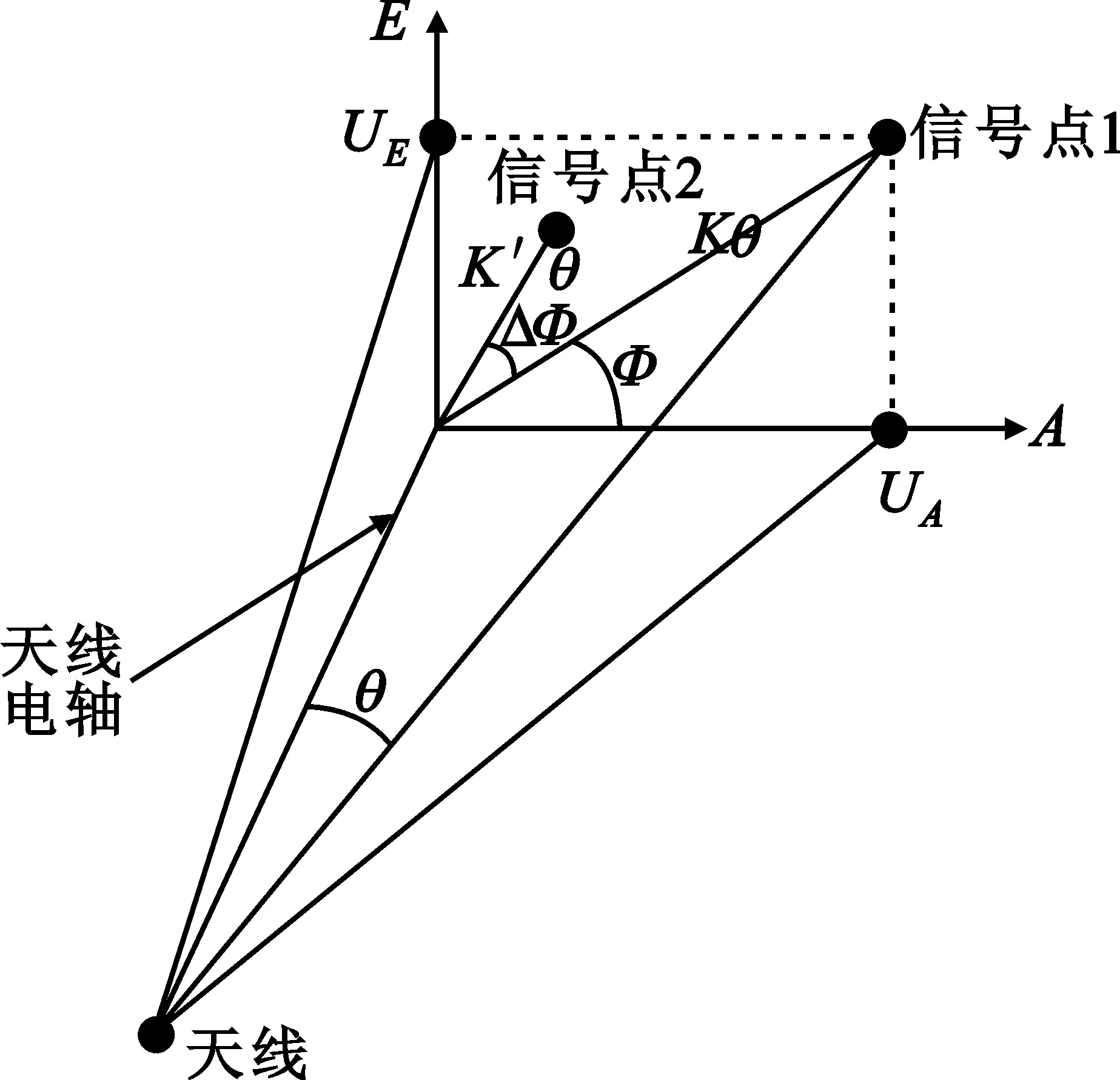
图1 天线跟踪目标误差电压形成原理图Fig.1 Illustration of error voltage produced by antenna tracking object
从图1中可以看出,方位、俯仰误差电压表示如下:
UA=Kθcos(Φ+ΔΦ)=
(1)
UE=Kθsin(Φ+ΔΦ)=
(2)
式中,UA为方位误差电压,UE为俯仰误差电压,K为下行链路增益系数,θ为天线电轴与天线到空间目标连线之间的夹角(偏离角度),Φ为目标与方位轴夹角,ΔΦ为接收机和、差链路相位差。
3 副面馈电角度标校原理
副面馈电角度标校是一种利用在天线副反射面增设多个(一般为5个)下行信号点源来模拟标校塔实现海上无塔角度标校的新方法。天线副面处于馈源喇叭的远场区,根据天线微波辐射原理及电磁波传播理论,如图2所示,分别在天线副反射面中心位置以及过中心轴线且与中心位置上下、左右对称的4个位置处共开设5个信号耦合孔,5个信号耦合孔后的正对处依次安装5个信号耦合器。中心位置信号耦合器模拟天线正对目标时的信号,上下位置信号耦合器分别模拟目标俯仰正、反偏信号,左右位置信号耦合器分别模拟目标方位正、反偏信号。通过对此5个信号耦合器射频信号的控制达到对天线跟踪接收机角度标校[3]。
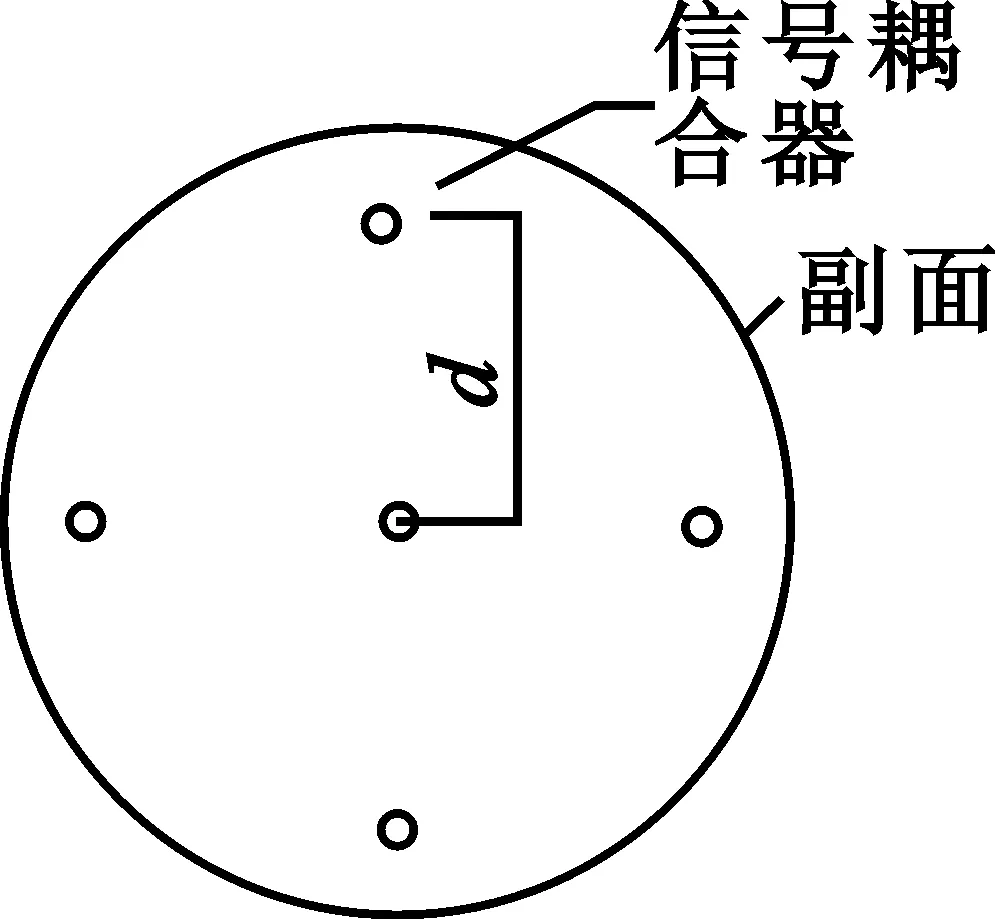
图2 副面射频信号耦合装置分布示意图Fig.2 Distribution of coupling devices
副面馈电角度标校的原理是依据安装于副面的信号耦合器相对与天线馈源喇叭模拟方位或俯仰空间位置上产生一定的偏置角来完成跟踪接收机角度标校,因此理论上要求每个偏置信号耦合器应精确定位,确保耦合器产生的信号等效为一个仅在方位或仅在俯仰上具有一定偏置角度的目标。但从实际的安装调试情况来看,副面馈电角度标校方法存在信号耦合器在天线副面上精确定位较困难的问题,导致同一信号耦合器产生模拟目标偏置信号既包含方位偏置又包含俯仰偏置,且偏置角度较难控制为一固定值。产生这一现象的主要原因有以下两个方面:
(1)天线副反射面为曲面,信号耦合孔所在副面的曲面方向直接影响偏置信号在方位、俯仰上的偏置量,因此精确定位困难;
(2)由于天线实际安装时副面与馈源喇叭的空间几何位置较理论设计有一定的偏差,部分天线因反射体改造时为调整天线方向图及电轴指向对副面调整幅度较大,导致天线实际安装的副面位置与馈源喇叭轴线偏差较大且明显不对称,因此耦合器精确定位相当困难。
4 特殊情况下的副面馈电角度标校
4.1 标校原理及步骤
为解决副面馈电角度标校因安装于副面上的信号耦合器精确定位相对困难的问题,我们提出了一种基于副面馈电的新的角度标校方法,在副面上开孔安装信号耦合器的位置无需严格按照单个方位或单个俯仰偏置一固定值,可以有选择地在副面任意位置开设信号耦合孔并在耦合孔后安装信号耦合器。这里所说的任意位置是相对于副面角度标校必须具有精确位置而言的,实际上耦合孔位置也有一定的要求,即必须确保信号耦合孔耦合出的信号处于天线差方向图线性范围内且不在天线和方向图零点。这样既保证了用于标校的耦合信号有一定的偏置,又保证了偏置处于天线方向图线性范围内。
图3为一信号耦合孔的开孔位置及与之对应的天线伺服控制计算机跟踪界面显示的大天线实际偏离目标的位置。从图中可以看出,方位偏置对应到跟踪示波器的俯仰上,该现象可以从馈源辐射场的理论公式上进行解释,本文不作详细说明。
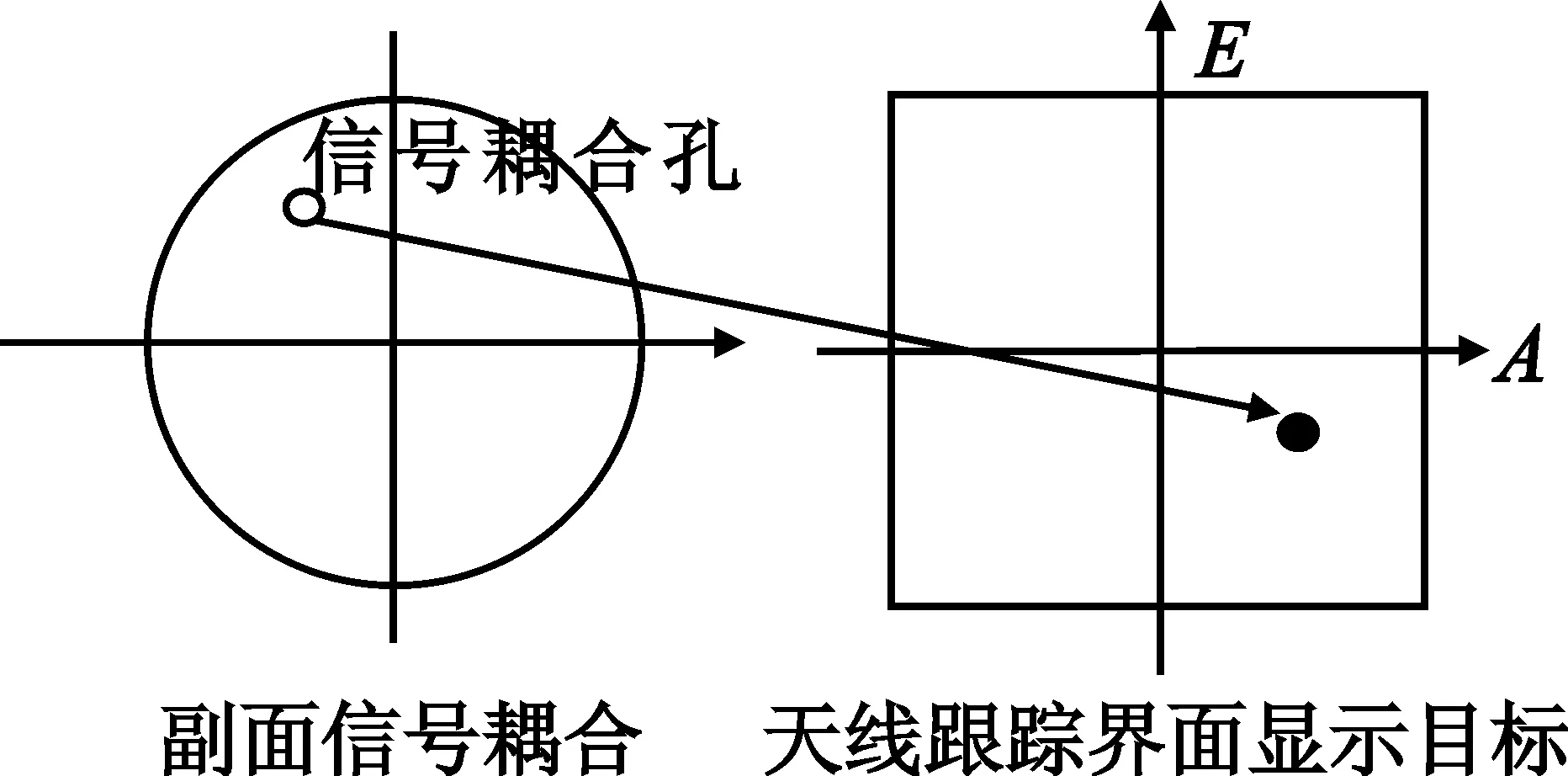
图3 副面信号耦合器对应位置示意图Fig.3 Corresponding position distribution of coupling devices
具体标校实施步骤如下:
(1)接收机设置系统下行频点f,频率尽量选取在系统下行工作频段中间点。对大天线远场目标(标校塔或对同步星)完成该频点接收机精确的角度标校,包括接收机方位、俯仰交叉耦合度调整及定向灵敏度调整。接收机记录相关数据(包括链路移相值α及增益K)[4]。
(2)开启天线副面信号耦合孔信号,频点为f,将信号输出强度调整到要求值。接收机采用前一项的标校数据,记录信号在天线伺服控制台界面的显示位置方位误差电压UA及俯仰误差电压UE值。信号在天线伺服控制计算机界面的显示具体位置如图4中信号点1所示,由于接收机采用的是已经标校的数据,因此ΔΦ=0°系统无交叉耦合,则对应的方位俯仰误差电压值为
UA1=KθcosΦ
(3)
UE1=KθsinΦ
(4)
(3)信号频点不变,更换下行链路或链路不变将接收机相位和增益数据打乱模拟接收机性能发生漂移。开启天线副面信号耦合孔信号,记录信号在天线伺服控制计算机界面的显示位置的方位误差电压UA及俯仰误差电压UE值[5]。信号在天线伺服控制台界面的显示具体位置如图4中信号点2所示,由于接收机采用的是没有经角度标校的数据,因此ΔΦ≠0°系统一般会有交叉耦合且链路增益也不为K(设为K′),则对应的方位俯仰误差电压值为
UA1=K′θcos(Φ+ΔΦ)
(5)
UE1=K′θsin(Φ+ΔΦ)
(6)
(4)接收机角度标校。如图4所示,保持链路增益K′不变,调整链路移相器改变链路相位使(Φ+ΔΦ)=0,此时信号在天线伺服控制计算机界面的显示具体位置从信号点2移动到信号点3位置;保持链路相位不变,调整链路增益,使UA1=Kθ,此时信号在天线伺服控制计算机界面的显示具体位置从信号点3移动到信号点4位置;保持链路增益不变,调整链路相位,使UA1=KθcosΦ,此时信号在天线伺服控制计算机界面的显示具体位置从信号点4移动到信号点1位置,ΔΦ=0接收机无交叉耦合,增益为K满足要求。

图4 角度标校过程示意图Fig.4 Illustration of phase calibration
(5)记录接收机移相值及增益值数据,接收机f频点角度标校完成。采取同样的方法可完成其它所有频点的角度标校工作。
4.2 海上无塔标校实现
船出海后,因环境影响或链路维修等原因,接收机性能会有一定程度的改变,和差链路相位、增益均会发生漂移,必须进行角度标校,可采用如下两种方法完成海上无塔动态角度标校。
(1)查表法
船在码头时,将天线下行工作频段按照一定的步长(如5 MHz)分成若干个频点,采用4.1节第2步的方法记录下天线副面上某信号耦合器各频点信号对应的方位、俯仰误差电压uA、uE值,形成相应数据表格。当船出海后需要对某频点信号进行角度标校,可以采用查表方法找出与之最接近频点信号的方位、俯仰误差电压uA、uE值,按照4.1节步骤4完成该频点角度标校工作。
(2)自动校相辅助法
自动校相是测控系统数字跟踪接收机通过软件自动查找满足某频点信号角检器输出最大误差电压时所对应的移相值。从多次试验情况来看,各频点副面馈电信号自动校相所得的移相值Φ自与该频点信号远场目标(对塔或同步星)角度标校所得真实移相值Φ真的差值Φ差基本为一固定值。表1为某天线自动校相及对同步星实际标校数据,从表中可以看出,自动校相与对同步星校相差值平均为110°左右,误差小于±10°,在允许误差范围内。因此,当船出海后需要对某任务频点f任信号进行角度标校时,可以先按照4.1节的方法得出某标准频点f标真实移相值Φ标,然后结合自动校相法得出副面馈电信号在标准频点f标及所要标校的任务频点f任对应的自动校相移相值Φ自标、Φ自任,最后计算出任务频点f任真实移相值为:Φ自任+Φ标-Φ自标。
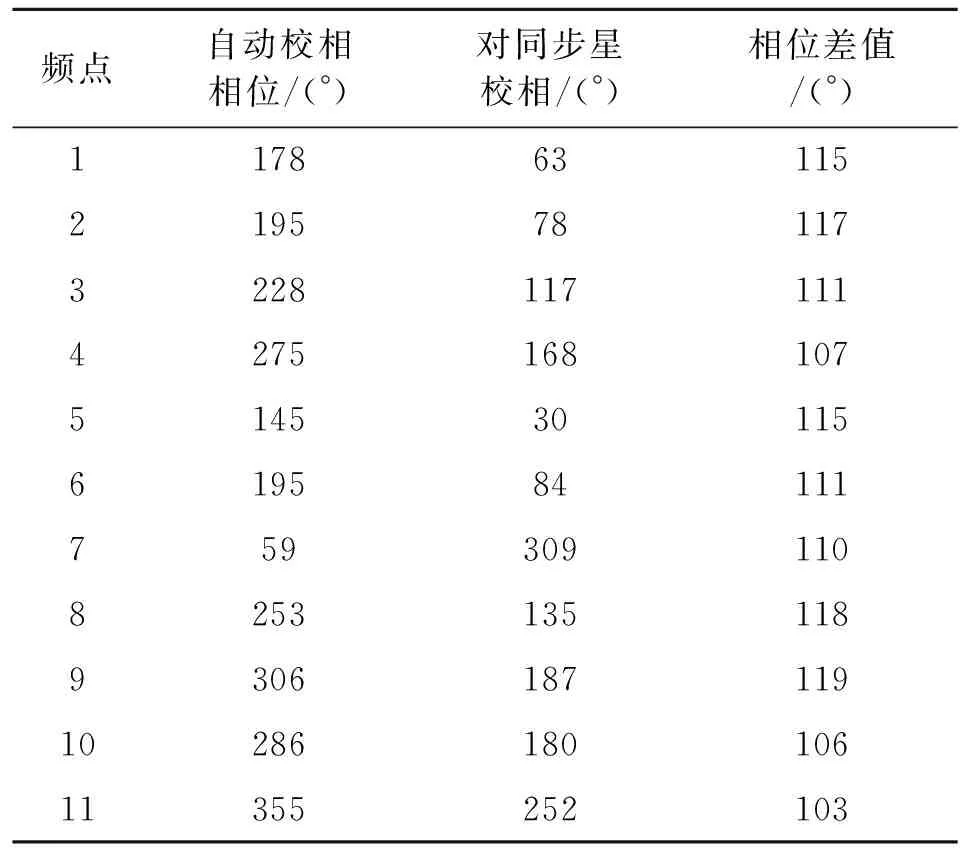
表1 角度标校数据比较表Table 1 Data comparison table of angle calibration
5 试验情况
5.1 同频点不同链路试验情况
试验所用天线类型为C频段10 m修正型卡塞格伦双反射面船载测控天线。按照4.1节方法对频点f1不同链路进行角度标校,即先按照4.1节中步骤1和2在已经标校好的A套下行接收链路完成频点f1副面信号耦合器误差电压显示位置定位;再按照4.1节中步骤3~5对B套下行接收链路完成频点f1角度标校。B套标校完成后对其方位、俯仰线性度检查,其方位、俯仰拉偏线性如图5所示。
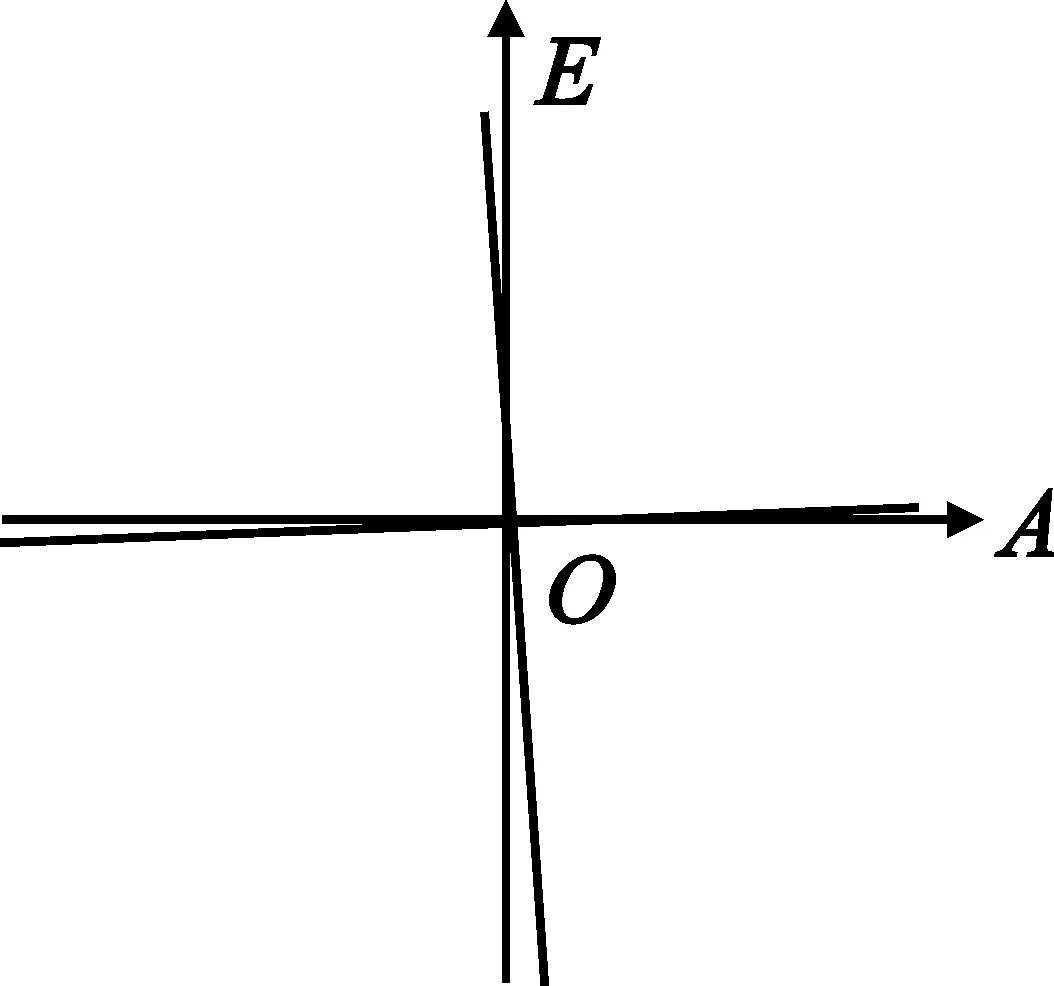
图5 接收机拉偏线性图Fig.5 Deviation linearity of receiver
从图5可以看出,方位、俯仰线性良好,接收机跟踪性能满足使用要求。
5.2 不同频点不同链路试验情况
采用4.2节自动校相辅助法对多个不同频点进行角度标校试验,天线仍为C频段10 m修正型卡塞格伦双反射面船载测控天线,以f1为参考频点,记录A套接收机f1频点标校完成后的真实移相值Φ1,然后结合自动校相法得出副面馈电信号在标准频点f1及所要标校的试验频点f试对应的自动校相移相值Φ自标、Φ自试,最后计算出试验频点f试理论移相值为:Φ试=Φ自试+Φ标-Φ自标。本次试验选用了f2、f3、f4、f54个试验频点进行角度标校,具体数据如表2所示。
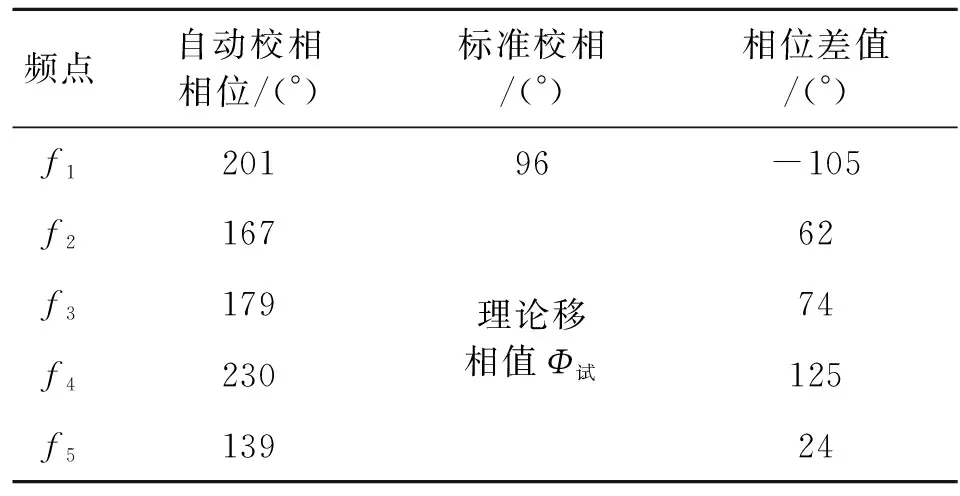
表2 试验数据Table 2 Test data
根据表2中各试验频点的理论移相值Φ试设置跟踪接收机参数,并检查各试验频点其方位、俯仰拉偏线性,如图6所示。

图6 各频点接收机拉偏线性图Fig.6 Deviation linearity of receiver at different frequency point
从图6可以看出,方位、俯仰线性良好,接收机跟踪性能满足使用要求。
6 结束语
本文提出的在天线副面与馈源喇叭空间几何位置不对称情况下的角度标校本质上仍属于副面馈电角度标校,是一种特殊情况下的天线副面角度标校,是对副面角度标校方法的完善和补充。该方法较好地解决了副面馈电信号耦合器精确定位难的问题,为船载大型测控天线海上动态角度标校提供了一种新的角度标校方法,具有较高的理论和实用价值。该方法可推广运用于其它无标校塔的陆基高频率大口径测控天线的角度标校。
参考文献:
[1] 毛南平,丛波.近场效应对一种C频段统一测控雷达角度标校数据的影响分析[J].电讯技术,2004,48(4):65-68.
MAO Nan-ping,CONG Bo.Analysis of Near Field Effect on the Angle Calibration Data of a C Band Unified TT&C Radar[J].Telecommunication Engineering,2008,48(4):65-68.(in Chinese)
[2] 沈民谊,蔡镇远.卫星通信天线、馈源、跟踪系统[M].北京:人民邮电出版社,1993.
SHEN Min-yi,CAI Zhen-yuan.Satellite communications antenna,feed horn and tracking system [M]. Beijing: People′s Post&Telecom Press, 1993. (in Chinese)
[3] MAO Nanping,YU Xinfeng.Subreflector Feed Angle Calibration for Giant T&C Antenna with Two Reflectors under Maritime Dynamic Environment[C]//Proceedings of International Conference on Mechanical and Electrical Technology.Singapore:[s.n.],2010:223-225.
[4] 钟德安. 航天测量船测控通信设备标校与校飞技术[M].北京:国防工业出版社,2009.
ZHONG De-an. Calibration technologies for spaceflight survey ship TT&C and communication system[M]. Beijing: National Defense Industry Press, 2009. (in Chinese)
[5] 赵业福,李进华.无线电跟踪测量[M].北京:国防工业出版社,2003.
ZHAO Ye-fu, LI Jin-hua. Radio tracking and measurement[M]. Beijing: National Defense Industry Press, 2003. (in Chinese)
