虚拟样机技术的 360°旋转液压缸运动仿真研究
2010-09-23孙松林
王 韧,孙松林
(湖南农业大学工学院,湖南 长沙 410128)
虚拟样机技术的 360°旋转液压缸运动仿真研究
王 韧,孙松林
(湖南农业大学工学院,湖南 长沙 410128)
采用 Pro/E软件建立三维旋转液压缸模型,并运用 Pro/E和 ADAMS的专用接口 (M ECH/PRO)将其导入到 ADAMS中,对该模型的虚拟样机进行运动仿真研究。仿真结果表明该液压缸在旋转过程中运动平稳、回转精度高且易于控制,实现整圈旋转。为物理样机的设计和制造提供了理论支持和技术借鉴。
虚拟样机;旋转液压缸;ADAMS;运动仿真
一、引言
液压缸是将液压能转变为直线运动机械功的一种能量转换的液压执行元件,旋转液压缸是一种能把活塞的直线运动转变成旋转运动并做功的液压元件,广泛地应用于液压钻机、凿岩机、起重机、铲运机和挖掘机等大中型工程机械中,目前美国 Helac公司的 L10、20、30系列旋转液压缸,日本 TAKEDA公司和挪威 Scana Skarpenord AS公司生产的旋转液压缸,广泛应用于各种类机械中。国内生产的大型工程机器为了实现某些部件在重载下的大角度旋转,一般都采用带齿条的直线活塞缸驱动齿轮的方式,存在结构大、反向间隙大、响应慢且精度不高等问题;或采用叶片式液压缸,同样存在结构尺寸大、承载负荷小、密封件易损、寿命短等问题,且旋转角度均不超过 270°,因此,设计和制造 360°旋转液压缸对打破发达国家对该产品及技术的垄断,提升我国的制造业水平是一个重大的突破。
本文结合使用三维造型软件 Pro/E和机械动力学仿真软件 ADAM S软件,建立了一种可实现 360°旋转的液压缸的三维数字模型——虚拟样机。运用虚拟样机,结合实例,对旋转液压缸的运动情况进行了仿真,为随后物理样机的设计和制造提供了理论支持和技术借鉴。
二、旋转液压缸的结构设计和工作原理
所设计的旋转液压缸如 图 1所示,主要由螺杆、活塞、空心螺杆、螺母、缸筒、圆柱滚子轴承、定位板、轴套、塞子、前后端盖、各密封件等零件组成,通过双极螺旋副[6,7],将液压力转换成转矩输出,并通过调整进出油口油压,实现主轴的回转运动。
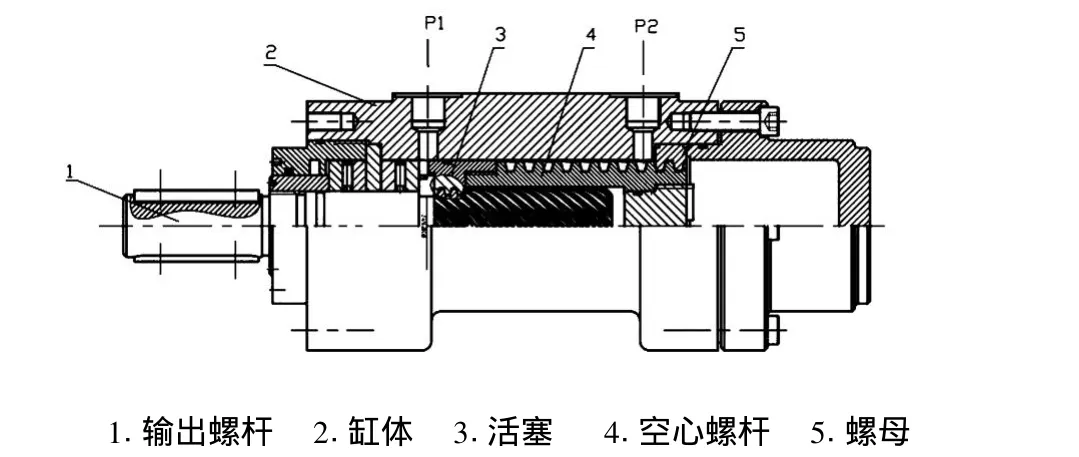
图 1 旋转液压缸的结构
液压缸内部,通过密封圈及空心螺杆上的塞子,分成前后独立的两腔。当 P1为进油口,P2为出油口时,即液压缸左腔的压力大于右腔的压力时,活塞被推动向右运动,活塞与空心螺杆通过螺纹紧固连接,由于空心螺杆与螺母的啮合作用,活塞与空心螺杆作直线逆时针旋转运动 (从左向右看)。而此时活塞与螺杆也是一个螺旋副啮合作用 (螺旋方向与空心螺杆与螺母的螺旋副相反),活塞的旋转运动传递给了螺杆,同时活塞的向右直线运动也带动螺杆作逆时针旋转运动 (从左向右看),通过两级螺旋副的放大作用,只要较小的工作行程,就可以得到较大的输出旋转角度。反之,当液压油右腔压力大于左腔压力时,液压缸主轴运行方向相反。如此,控制液压油口压力差,将可以控制液压缸主轴输出旋转方向。
为了解决螺旋副运动产生的轴向力,大部分由螺母来抵消。而螺母是通过后端盖固定在缸筒上面的,因此运动产生的轴向力由缸筒及后端盖承受。这单靠压紧力及螺母两侧面与缸筒和后端盖的摩擦力是不够的,因此在螺母与后端盖的贴合面,即螺母右端面和后端盖的左端面上加工凹凸槽,以增大摩擦力,防止螺母在工作过程中发生相对转动。
为使液压缸正常工作,本液压缸设计了限位装置,以防止活塞卡死。活塞左边的极限行程通过卡环限位,右边极限位置通过空心螺杆上的塞子限位,如此,可保证活塞不至于运动到油口处而堵住油口,出现卡死现象。
三、旋转液压缸虚拟样机三维实体建模
首先创建构成模型的物体,它们具有质量、惯性矩、转动惯量等物理特性。虽然在 ADAM S软件中 ADAM S/V iew模块提供了实体建模工具,但是其功能较差,使用 ADAM S/V iew中的零件库只能创建形状简单的物体。而模型的好坏直接影响到仿真的精度与可信度,所以在本文中使用 Pro/E 3.0建立了旋转液压缸的三维实体模型,如图 2所示。一些物理量如转动惯量、质量、质心位置等,借助 CAD软件 Pro/E获得。
然后通过 Pro/E和 ADAM S的专用接口 (M ECH/PRO)将该三维实体模型输入到 ADAM S中。在 Pro/E环境中,确定各部件之间的连接情况以及部件之间如何相对运动的简单的约束 (Constraint),对于复杂的约束,只能使用 ADAM S/V iew中的约束库施加。
最后通过施加力 (Fo rce)和力矩 (torque),使模型按照设计要求进行运动仿真。
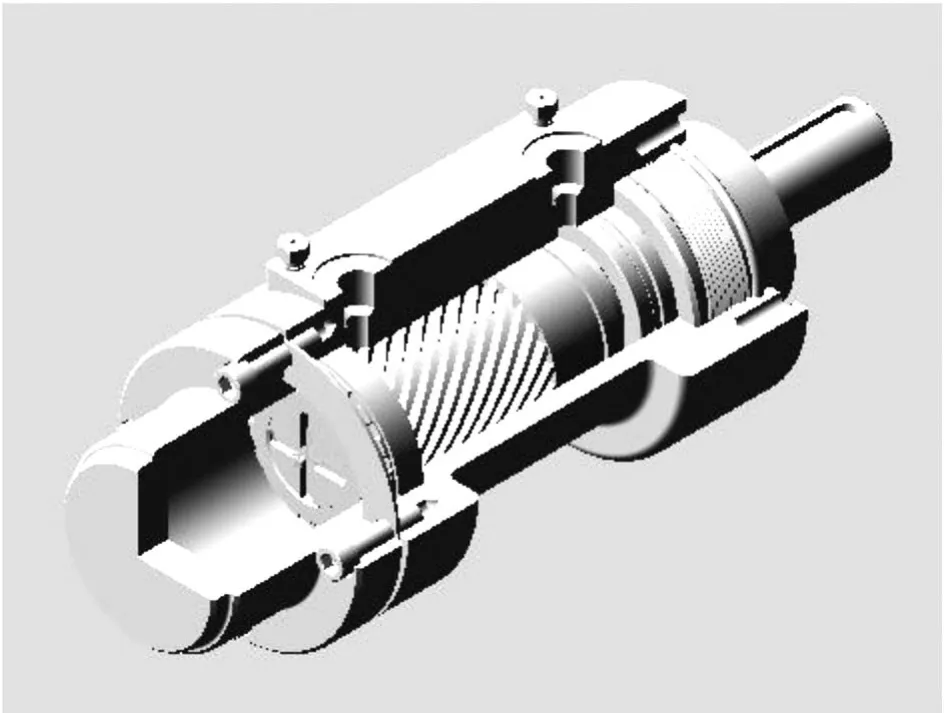
图 2 三维实体模型
四、旋转液压缸运动仿真及结果
为了验证液压缸平稳地实现 360度旋转,按照设计要求,在ADAM S/V iew中,选取该液压缸的几种运动情况进行仿真,仿真时间暂取为 5秒,得到了相应的仿真结果。在下面的叙述中,第一级螺旋副指的是空心螺杆和螺母之间的螺纹副;第二级螺旋副指的是输出螺杆和活塞之间的螺纹副;而 SCG_Angle、SCG_Angular_velocity、SCG_Angu lar_acceleration分别指的是输出螺杆的角度、角速度和角加速度。
1.—螺距相同,—转速不同
当第一级螺旋副螺纹的螺距为 24mm,第二级螺旋副螺纹的螺距为 8mm,活塞分别以 -30 rad/sec、-45 rad/sec、-60 rad/sec的角速度转动时,得到输出螺杆的的角度、角速度和角加速度分别图 3所示。
从图 3可以看出,当活塞以 --30 rad/sec、-45 rad/sec、-60 rad/sec的角速度运动时,输出螺杆分别在 3.692、2.462、1.846秒时,旋转角度达到 360度,体现了该液压缸回转精度高的特点,其 Z方向角速度值分别稳定在 -1.702 rad/sec、-2.553 rad/sec、-3.403 rad/sec,Z方向角加速度均在零值附近波动,其幅值随时间趋近于零。因此液压缸的旋转运动是非常平稳的。
2.—螺距不同,—转速相同
当活塞以 -30 rad/sec的角速度转动时,第一、二级螺旋副螺纹的螺距按表 1设置。
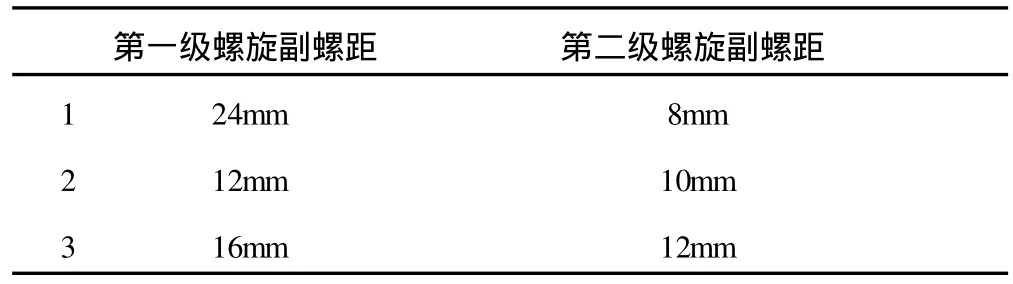
表 1 第一、二级螺旋副螺纹螺距
仿真得到输出螺杆的的角度、角速度和角加速度分别如图 4和所示。
从图 4可以看出,当活塞以 - -30 rad/sec角速度转动时,输出螺杆在 Z方向角加速度均在零值附近波动,其幅值随时间越来越接近零。因此液压缸的旋转运动是非常平稳的。
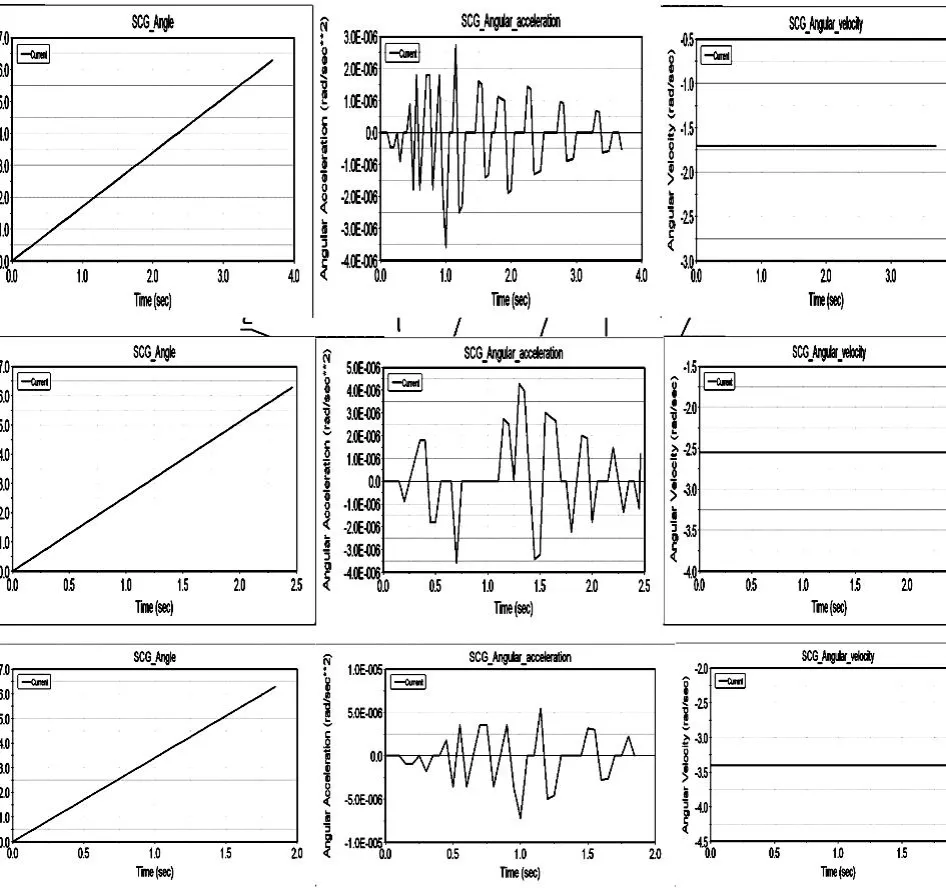
图 3 活塞分别以 -30、-45、-60 rad/sec的角速度转动时,输出螺杆的的角度、角加速度和角速度
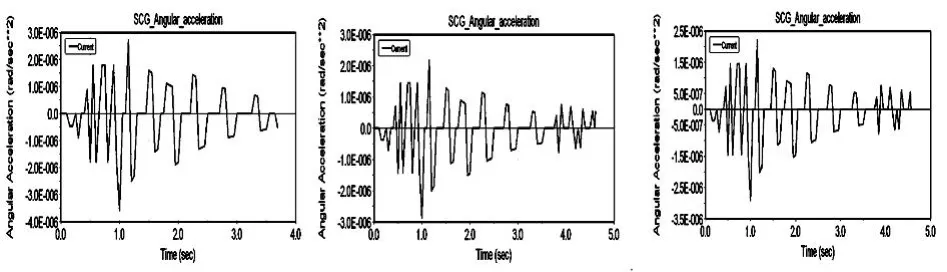
图 4 活塞以 -30 rad/sec的角速度转动时,输出螺杆在不同螺距情况下的角加速度
五、结论
旋转液压缸是一种体积较小,但输出摆角和扭矩均较大的液压元件,被广泛运用于各种工程机械。利用 Pro/E软件创建了旋转液压缸的三维实体模型;运用 ADAM S建立了其虚拟样机模型;通过采用双螺旋传动,解决了传统齿条式或叶片式液压缸存在结构大、精度低等问题;通过旋转液压缸的运动仿真分析,验证了所提方案满足设计要求,为物理样机的研制提供了重要的依据。虚拟样机技术的运用缩短了开发周期,降低了设计成本,保证了方案的质量。
[1] 王国强,张进平,马若丁 .虚拟样机技术及其在ADAM S上的实践[M].西安:西北工业大学出版杜,2002.
[2] 熊光楞,郭斌,陈晓波 .协同仿真与虚拟样机技术[M].北京:清华大学出版社,2004.
[3] 林清安 .Pro/E零件设计基础篇 (上)[M].北京:清华大学出版社,2001.
[4] 陈立平,张云清,任卫群等 .机械系统动力学分析及ADASM应用教程[M].北京:清华大学出版社,2005.
[5] 邓鹏,潘尚峰 .基于 ADAM S/Hyd rau lic的液压缸机械损失参数的研究[J].液压与气动,2006(12):83-85.
[6] 梁锡昌 .一种新型旋转作动器[J].航空学报,2001,22(6):576
[7] 梁锡昌 .基于螺旋机构的旋转作动器研究[J].航空学报,2003,24(3):282~285
Research on M otion Sim u la tion of Rotary Hydrau lic Cy linder Based on V ir tua l Prototype Techno logy w ith ADAM S
WANG Ren,SUN Song-lin
(1.The Co llege of Engineering,Hunan Agricu lturalUniversity,Changsha 410128,Hunan;
2.Hunan Industry Po lytechnic,Changsha 410208,Hunan)
U sing Pro/E,an entitymodelof rotary hyd raulic cylinderw ith 360 degreeswasbuiltup,And then importing it into ADAMSby using the special interface software(MECH/PRO)between Pro/E and ADAMS,based on the the virtualp rototype,themotion simu lation of a rotary hyd rau lic cylinderw ith 360 degreeswas developed.The simulation results indicate that the rotary hydraulic cylinder keepsa stable stance and high p recision and easy to controlwhen it rotating,and it’s rotary angel reach to 360 degrees.Thiswork p rovided the theoretical supportand technical reference for the developmentof the physicalp rototype in the future.for the app lication of Internet smart cards,were advanced.
virtualp rotype;Rotary hyd rau lic cylinder;ADAM S;motion sim u lation
TH 16
A
1671-5004(2010)05-0008-02
2010-09-11
王 韧 (1985—),女,湖南长沙人,湖南农业大学工学院 07级工程硕士,湖南工业职业技术学院助教、助理实验师,研究方向:农业机械化;孙松林 (1963—),男,湖南桃源人,湖南农业大学教授,博士生导师,研究方向:农业机械化。
