“飞思卡尔”智能汽车系统设计分析
2010-09-23赵隆基
赵隆基,乔 朕, 陆 群
盐城工学院机械工程学院,江苏盐城 224051
“飞思卡尔”智能汽车系统设计分析
赵隆基,乔 朕, 陆 群
盐城工学院机械工程学院,江苏盐城 224051
飞思卡尔智能汽车比赛是全国范围内的大学生电子设计创新比赛项目,本论文结合实际参赛经验,对智能小车的设计进行了分析探讨,给出了系统的硬件结构框架设计方案,并对每一个硬件功能模块进行了论述,在此基础上进行了系统软件流程设计,论述了智能汽车控制算法的实现,从而保障了智能汽车全部比赛功能的实现。智能汽车的分析设计能够提高大学生的分析设计动手实践能力,因而是值得推广参与的。
飞思卡尔;智能汽车;控制算法
0 引言
全国大学生“飞思卡尔”杯智能汽车竞赛是在规定的模型汽车平台上,使用飞思卡尔半导体公司的8位、16位单片机作为核心控制模块,通过增加道路传感器、电机驱动电路、舵机驱动电路以及编写相应软件,制作一个能够自主识别道路的模型汽车,按照规定路线行进,以完成时间最短者为优胜。因而该竞赛是涵盖了自动控制、模式识别、传感技术、电子、电气、计算机、机械与汽车等多学科专业的创意性比赛。这就要求学生组成团队,协同工作,综合运用所学知识,并加以运用与实践。
1 系统设计
1.1 硬件结构设计
如图1所示,该系统主要包括七个模块:单片机控制模块、电源管理模块、路径识别模块、车速检测模块、电机驱动模块、舵机驱动模块、调试模块。

图1 智能汽车硬件系统结构框图
各模块的主要功能如下:
1)单片机控制模块:系统中使用的是Freescale公司生产的MC9S12XS128单片机,作为系统的的核心模块,主要是将图像传感器与速度传感器检测的信号相互协调,在所编写的程序基础上,给予电机与舵机控制信号,使其根据赛道信息调整相应转速与方向;
2)电源管理模块:是整个系统的动力保障,可靠、稳定的电源是系统持续运行的必备条件,整个系统的供电是由7.2V锂电池提供的,运用DC-DC电压变换原理,得到需要的电压;
3)路径识别模块:是系统信息输入的重要来源,相当于智能汽车的“眼睛”,主要是负责将小车当前或前面位置的赛道信息,输出给主控芯片处理,其前瞻距离和赛道信息是红外线光电方案所不能比拟的;
4)车速检测模块:检测小车当前行驶速度,并实时地将车速信息反馈给主控芯片,形成闭环系统,是提高控制精度的重要措施;
5)电机驱动模块:是整个系统的重要组成部分,也是高效的算法得以顺利运行地基础,好的电机驱动有利于小车的加速与制动;
6)舵机驱动模块:如果说电机驱动是“油门”,那门舵机驱动就是“方向盘”,根据主控芯片控制的输出信号,控制小车执行相应的专项要求;
7)调试模块:辅助调试模块用于建立良好的人机交互界面,是检查所编写程序错误的重要手段,同时也是比赛时修改一些重要参数的方便措施,能够大大节省调试过程。
1.2 系统软件设计
如图2所示,可以看出软件设计主要分为3部分:图像信息采集与处理、控制算法以及速度反馈信息。
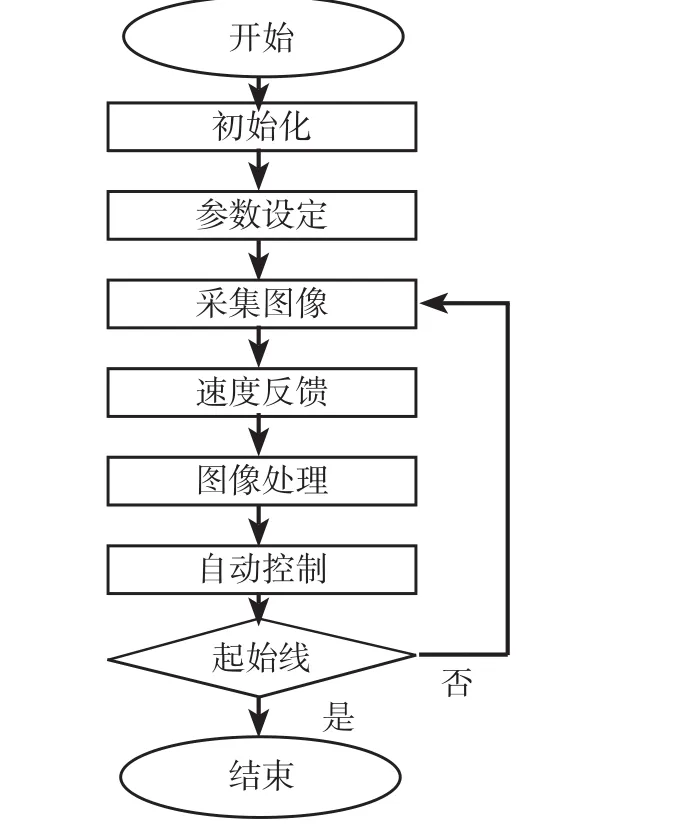
图2 智能汽车软件系统流程图
图像信息采集与处理:摄像头分为黑白和彩色两种,根据赛道的情况,可以看出只需要摄像头的灰度信息,色彩信息可以忽略,所以本设计中使用的是黑白的摄像头作为路径识别单元。根据摄像头的工作原理,每个信号结束以后都有一个行同步信号,根据这一点,可以每隔7个~8个有效行采集一行,这样不仅减小了处理器的压力而且也减少了不必要参数的设定;对所采集的信息进行处理的方法一般为二值化处理,设定一个阈值,将图像的灰度信息转换为两个值,即高于或低于这个设定的阈值。除二值化处理外,还有边缘检测算法。
控制算法:常用的自动控制算法有PID、模糊控制、Bang-Bang。PID(Proportional Integral Differential)控制是比例、积分、微分控制的简称,原理是根据系统的被调量实测值与设定值之间的偏差,利用偏差的比例、积分、微分3个环节的不同组合计算出对广义被控对象的控制量;模糊(Fuzzy)控制是用语言归纳操作人员的控制策略,运用语言变量和模糊集合理论形成控制算法的一种控制;Bang-Bang控制即鲁棒控制,是一个着重控制算法可靠性研究的控制器设计方法。在整个系统中,控制算法并不局限于一种思想,由于摄像头相比较与其他组具有优良的前瞻性,在赛道信息保密的情况下,可以获取更多的赛道信息,综合运用各种算法可以更高效的达到快速运行的目的,例如当小车速度过快时,PID在速度调节方面有处理周期过长的缺点,这时,加入Bang-Bang的控制思想,能够解决这方面的问题。
速度反馈信息:这部分软件主要是起辅助作用,开环系统相较于闭环系统来说,精确程度方面会降低很多,在系统中添加速度检测的目的就在于提高系统运行的准确性。
2 结论
本文介绍了智能车所应该具有的硬件模块,以及各模块在系统运行中所起的作用,同时也说明了个模块相互协调工作的必要条件——软件,具体在小车机械性能方面的改动并未介绍,只有搭建好优秀的硬件平台,编写软件的思想才能得以实现。飞思卡尔智能汽车比赛是有一定挑战性的比赛,能够真正锻炼大学生的分析设计能力和动手实践能力,是值得推广参与的。
[1]卓晴,黄开胜,邵贝贝.学做智能车——挑战“飞思卡尔”杯[M].北京:北京航空航天大学出版社,2007.
[2]吴怀宇,程磊,章政.大学生智能汽车设计基础与实践[M].北京:电子工业出版社,2008.
[3]裴昌幸,刘乃安.电视原理与现代电视系统[M].西安:电子科技大学出版社,1997.
[4]阮秋琦.数字图像处理学[M].北京:电子工业出版社,2001.
[5]王庆有.图像传感器应用技术[M].北京:电子工业出版社,2003.
U46
A
1674-6708(2010)32-0083-02
