天文望远镜子镜超磁致伸缩驱动器驱动模型及参数识别*
2010-09-20徐彭有杨斌堂谭先涛杨德华
徐彭有,杨斌堂,孟 光,谭先涛,杨德华
(1.上海交通大学机械系统与振动国家重点实验室,上海200240; 2.中国科学院国家天文台南京天文光学技术研究所,江苏南京210042)
天文望远镜子镜超磁致伸缩驱动器驱动模型及参数识别*
徐彭有1,杨斌堂1,孟 光1,谭先涛1,杨德华2
(1.上海交通大学机械系统与振动国家重点实验室,上海200240; 2.中国科学院国家天文台南京天文光学技术研究所,江苏南京210042)
采用超磁致伸缩驱动器(G MA,GiantMagnetostrictive Actuator)驱动拼接镜面天文望远镜子镜,并建立G MA精密位移驱动准确模型。针对传统遗传算法在辨识G MA位移模型参数时容易过早收敛到次优解的问题,提出了基于分层遗传算法(HGA,Hierarchical Genetic Algorithm)的参数识别方法,其结果在改善驱动位移模拟准确性和提高求解初期种群多样性,相对于其他算法都有较大程度的提高。研究通过与实验结果对比验证了所提出参数辨识方法和建立模型的有效性,位移预测值和实验值的平均偏离值不超过满行程的1.3%。研究还就驱动磁场强度幅值和预应力等因素对滞回、损耗、饱和磁化强度、饱和磁致伸缩量等模型参数的影响进行了分析。
拼接镜;超磁致伸缩驱动器;分层遗传算法;Jiles-Atherton模型;种群多样性
随着天文学的发展,对望远镜的口径要求越来越大。然而,口径8m以上的主镜,很难加工整块镜面。拼接镜面主动光学技术可以解决这个问题,它采用若干单独加工的六边形或者扇形子镜[1],通过精密驱动和传感控制技术对每个子镜进行主动精密定位,从而拼接成一个能使子镜之间表面光整衔接,一致性和完整性均佳的巨大镜面。G MA具有精度高、负载能力强、驱动行程大、响应迅速、无疲劳极限等优点,非常适用于子镜定位驱动。G MA中产生位移驱动的关键部件为超磁致伸缩材料(G MM,GiantMagnetostrictiveMaterial)棒。G MM为一种铁磁材料,其磁特性易受外部应力和温度的影响,材料本身的参数不稳定,存在着比较严重的磁滞回等非线性现象。磁滞回模型是G MA输出位移模型的重要部分,是实现G MA超精密驱动控制的关键,所以建立一个能够准确描述材料磁化过程的滞回驱动模型,对实现基于G MA的子镜微纳米精度控制定位具有十分重要的意义。
目前应用中使用比较多的磁滞回模型有Preisach模型和Jiles-Atherton模型[2](下文简称J-A模型)。Preisach是一种根据滞回现象采用纯粹的数学公式来模拟滞回的模型,不能揭示磁化强度磁滞回环进行拟合[3],并且证明遗传算法是一种比较理想的参数辨识算法。目前标准遗传算法(SGA, Standard Genetic Algorithm)存在一个主要问题:在面对样本空间巨大、解空间梯度方向变化频繁的问题时,往往过早收敛到与最优解差别比较大的次优解。
遗传算法过早收敛到次优解的根本原因是在搜索过程中种群的多样性下降很快[4],造成种群在次优解区域迅速大量繁殖。为了改善这种情况,对遗传算法的结构进行修改,提出使用分层遗传算法,仿真和实验结果表明改进后的分层遗传算法在提高种群多样性和最后辨识结果精度上都有了很大的提高。
①根据《全国民用机场布局规范(2020)》,地面交通100千米直线距离(或者1.5小时车程)被用作机场服务范围的标准。
1 基于Jiles-Atherton模型的G MA输出位移模型
1.1 G MA结构
有些企业在做企业风险内部审计的过程中,往往只对公司的财政收入和支出作出审计报告,只对财务方面的收支专况有所关注,而忽视了对业务领域及其信息系统上的拓展。
图1为实验中使用的双头超磁致伸缩驱动器结构示意图。采用双头驱动器可以实现灵活拼接。实际使用中固定一端,另一端接负载。通过改变线圈中驱动电流强度来改变G MM棒体中磁场强度,从而使G MM棒长度发生变化。端盖与套筒采用细牙螺纹连接,通过调节端盖的旋紧程度来设定G MM棒的预应力。
阴茎癌是一种不常见的恶性肿瘤,其危险因素主要有包皮垢长期刺激、包茎或包皮过长及不良卫生习惯等。60岁以上的老年人由于行动不便,卫生习惯差,不仅发病率较高且术后复发和转移率也较高。加之其发病部位敏感隐匿,在术后复查中患者多有禁忌证,导致其能够适用的有效检查手段较少。
“高立意”是指专题复习设计要以“提高独立的、综合性解题能力,掌握较为全面的解题方法、策略,形成一定的数学思想方法,提升数学素养”为立意,摆脱低水平的再现和大运动量题海或题型战术.
Jiles和Atherton指出,在外磁场的作用下,铁磁体的磁化过程分两个阶段,在初始磁化阶段,铁磁体内部的畴壁移动和磁畴转动都是完全可逆的,该阶段也属于起始磁导率μi范围;接下来直到饱和磁化之前为第二阶段,此时铁磁体的畴壁移动和磁畴转动是不完全可逆的,即可逆磁化强度和不可逆磁化强度同时存在。具体的表达式如下:
式中,M为总磁化强度;Man为无磁滞磁化强度;Mrev为可逆磁化强度;Mirr为不可逆磁化强度;Hε为等效磁场强度;为畴壁相互作用系;c为可逆系数;a为无磁滞磁化强度形状系数;k为不可逆损耗系数;Ms为饱和磁化强度;δM为防止接近饱和时微分磁化率出现负值而引入的参数[5]。H增加时, δ=1,H减小时,δ=-1。
实验使用的是多层螺线管,驱动磁场强度H和输入电流I关系为:
3月4日,还是发生了所有人不愿看到的事情,雨果在多次撞击水池的墙壁之后,突然身子一转,肚皮朝上,没有了呼吸和心跳,尽管工作人员采取了急救措施,但还是没能救活雨果。尸检结果显示,雨果死于脑动脉瘤造成的多处动脉破裂。

式中,fg为螺线管的形状因子;n为单位长度的线圈匝数。由(1)~(6)式可得:
式中N为采样点数;li和ui分别为参数θi的上、下限值;^d(k,θ)为在参数θ下通过模型计算的位移估计值。该模型遗传算法的个体适应度函数为:

式中λs为饱和磁致伸缩系数。
由于最终致动器输出位移d与磁致位移Lλ有关,需要对致动器的结构进行受力分析,分析基于如下假设:
2018年4月4日至5日西宁市严重污染天气特征分析 马学莲 张青梅 马海超 甘 璐 马 丽 朱宇蓉 (4-176)
图1 中G MA的等效力学模型如图2,磁致伸缩位移Lλ与G MA输出位移d的传递函数为:
(2)输出杆和套筒为理想刚体,碟簧存在刚度和阻尼。
1.2 G MA输出位移模型
(四)教师难以将情感态度价值观目标具体化。因为情感态度价值观处于抽象的心理情态与思维意识的发展维度,在教学中显得难于具体确定,难于操作,难于达成,难于评价。教师在落实这一目标时容易流于形式,生搬硬套,最终导致无法落实或落实不到位。
基于上述假设,简化的致动器等效力学模型如图2。
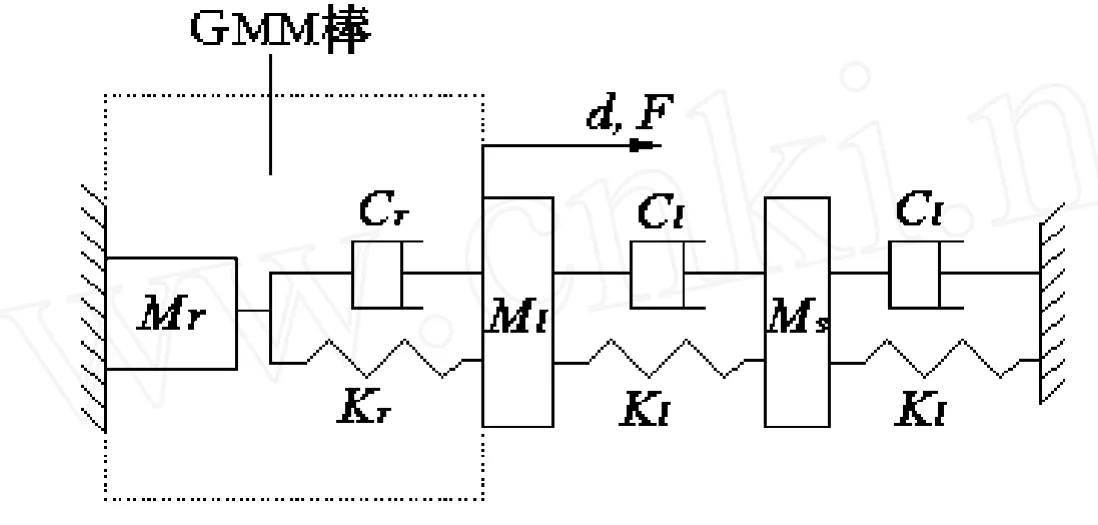
图2 G MA等效力学模型Fig.2 Equivalentmechanicalmodel of a giantmagnetostrictive actuator
(1)G MM棒是一个单自由度质量—弹簧—阻尼系统,运动过程中,一端位移为零,另一端位移始终与负载有相同的位移、速度和加速度;

式中,Mr为G MM棒的等效质量;Mt为套筒和线圈的质量和;Ml为子镜和输出杆质量和;L为G MM棒长;Cr为G MM棒等效阻尼系数;Cl为碟簧等效阻尼系数;Kr为G MM棒等效刚度;Kl为碟簧的等效刚度。
考虑到天文望远镜子镜超高精度低频驱动应用,现阶段着重研究了G MA的准静态特性,在驱动电流频率很小(0.1~1 Hz)情况下,经过估算,s2与s项影响很小,可以忽略不计。故而准静态情况下G MA预测输出位移为:

2.1 参数辨识评价函数
1.3 位移模型用于精密控制
由于模型存在严重的非线性和滞回特性,通常的闭环PI D控制都存在相位滞后、调节时间长等缺点,引入前馈G MA逆补偿控制器可以改善这个问题。在给定实验数据情况下,可以辨识出G MA输出位移模型参数(后文将会介绍),将辨识模型求逆可以作为G MA位移控制系统的前馈逆补偿控制器,其控制原理如图3。

图3 含前馈逆补偿控制器的G MA位移控制系统Fig.3 Scheme of the G MA displacement control system including an inverse compensator in a feedforward loop
2 基于分层遗传算法的参数辨识及种群多样性
在建立位移模型后,需要辨识模型中的参数,普通的遗传算法存在初期种群多样性下降过快而导致计算过早收敛到次优解的缺点,本文提出分层遗传算法辨识模型参数,可以比较好地解决这个问题。
未知参数为ga,c,a,k,Ms,λs和Kr,确定这些参数就可以G MA建立精密位移模型。

如图1所示,首先对图像进行预处理。本文采用K Zhang[14]等人提出的神经网络检测输入人脸图像的五个关键点,包括左眼、右眼、鼻子、左嘴角和右嘴角,然后根据上述关键点位置对图像进行对齐,使每一张图像双眼距离相等且处于同一水平线上,最后剪切对齐后的图像,除去不必要的背景、头发等部分,使得用于训练的图像只有人脸部分。
PIVAS建立对我院临床科室护理人员抗肿瘤药物职业暴露的防护作用调查 ……………………………… 孙 妍等(6):739

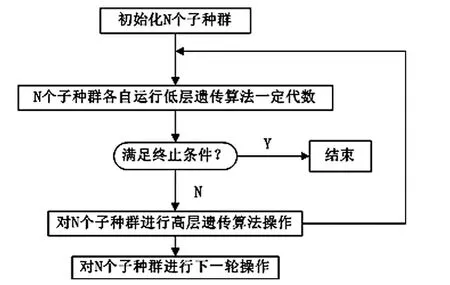
图4 分层遗传算法原理图Fig.4 Flowchart of hierarchical genetic algorithm
2.3 遗传算法种群多样性及评价
在国家会展中心与虹桥商务区隔河相望的绿地景观中,我创作了一件有视觉靓点的城市公共艺术,作品将国家会展中心建筑形象“四叶幸运草”的文化内涵和国家会展中心所在地青浦区域地界形象“蝶”引入公共艺术主题,以“蝶”为造形元素,以七彩花开绿地植物景观为背景,“蝶”简化为象征性的线,将雕塑形退化为简单的构成,营造彩蝶飞舞的城市公共绿地的文化氛围,喻意青浦与国家会展中心相互依恋的和谐文化。
评价遗传算法的优劣有一项重要指标为种群多样性(Population Diversity,PD),它是指种群中个体的差异程度,在遗传算法求解初期,希望种群多样性能尽量大,意味着在更大的空间寻找最优解。但是在求解后期希望种群多样性要低,这样可以在最优解附近尽快收敛。普通遗传算法会出现过早收敛到次优解的情况,这与种群多样性在求解初期迅速下降有密切关系。一个二进制编码的种群如下式,每行表示一个个体的二进制编码,pji表示第i个个体的第j位基因值。

Dgw代表遗传漂移的程度,是衡量遗传算法进化能力的重要尺度。且有0≤Dgw≤0.25,当Dgw=0.25时,种群基因内部多样性最大,此时种群具有最强的进化能力[8]。
3 实验结果分析

表1 GMA位移模型辨识参数Table 1 Parameter for the identification i n the GMA displacementmodel
关于表中数据,有如下分析:
(1)将第1种情况与第2种情况的数据进行比较,有c1
(2)将第1种情况与第3种情况数据比较,有c1
使用辨识后的参数建立G MA位移模型,3种情况下输出位移预测值与实验值如图5,所有位移曲线预测值和实验值的平均偏离值不超过满行程的1.3%。
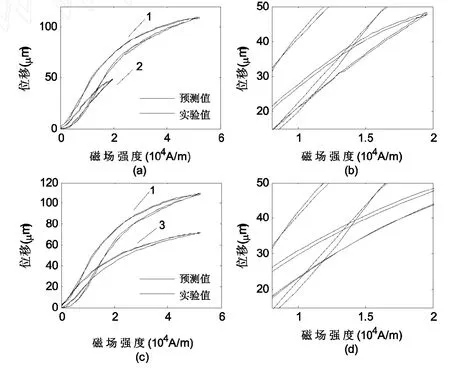
图5 实验数据和预测值比较:(a)情况1和情况2下位移与驱动磁场强度关系;(b)图(a)的局部放大图; (c)情况1和情况3下位移与驱动磁场强度关系;(d)图(c)的局部放大图Fig.5 Comparison of experi mental data(solid line)and model-predicted values(dashed line):(a)displacements as functions of(driving)magnetic field strengths in Case 1 and Case 2;(b)magnified view of a part of Fig.5(a); (c)displacements as functions ofmagnetic field strengths in Case 1 and Case 3;(d)magnified view of a part of Fig.5(c)
采用常用的标准遗传算法(Standard Genetic Algorithm,SGA)和自适应遗传算法(Adaptive Genetic Algorithm,AGA)对参数进行辨识,与本文所述的HGA进行比较,图(6)为第1种情况下的最优个体适应度进化轨迹和多样性演变轨迹。
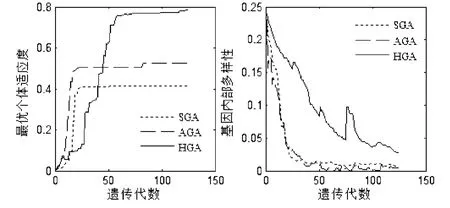
图6 (a)最大适应度进化过程 (b)基因内部多样性演变过程Fig.6 (a)Evolutionary process of the best-fit fractions (b)Evolutionary process of genetic diversity
由图6(a)可以看到SGA和AGA的最优个体到20代左右就收敛到次优解,而HGA到70代左右才收敛至近似最优解。由图6(b)可知SGA和AGA在求解初期的基因内部多样性下降很快,HGA在初期的基因内部多样性下降较慢,这与图6(a)算法的收敛情况是相对应的。由两幅图分析比较可知, HGA大幅提高了在算法初期的种群多样性,最优解的适应度远优于其他两种遗传算法。HGA的运算量会大一些,不过这不是通过无限增大子种群来实现的,而是通过子种群的交叉、变异操作提高种群多样性来实现的。
4 结 语
本文将G MA引入天文望远镜子镜的精密驱动,提出用分层遗传算法辨识G MA位移模型的多个相互耦合参数,实现精确辨识模型参数。使用辨识参数建立的G MA位移模型能精确预测位移,模型预测位移和实验位移的平均偏离值小于满行程的1.3%。同时对不同驱动条件下的G MA位移模型参数进行分析比较,为选择合适的驱动条件提供了依据。本研究下一阶段将该文建立的G MA精确位移模型用于精密驱动子镜的闭环控制系统,基于位移模型的前馈逆补偿控制器理论上可以在一定程度上解决普通闭环控制的相位滞后、调节时间长等问题,可以预见G MA在精密驱动天文望远镜子镜方面有很好的应用前景。
[1]孙首雄,王国民.大型光学望远镜扇形子镜支撑方法的探讨[J].天文研究与技术—国家天文台台刊,2008,5(2):176-181. SUN Shou-xiong,WANG Guo-min.Support Technique of Giant Sector-shaped Segmented Mirror Telescope[J].Astronomical Research&Technology,2008,5(2):176-181.
[2]Jiles D C,Atherton D L.Theory of ferromagnetic hysteresis[J].Journal of Magnetis m and MagneticMaterials,1986,61(1-2):48-60.
[3]W ilson P R,RosS J N,Brown A D.Opti mizing the Jiles-Atherton Model of Hysteresis by a Genetic Algorithm[J].IEEE Transactions on magnetic,2001,37(2):989-993.
[4]何琳,王科俊,李国斌,等.遗传算法种群多样性的分析研究[J].哈尔滨工程大学学报, 1999,20(4):27-33. HE Lin,WANG Ke-jun,L I Guo-bin,et al.The Analysis and Research of Genetic Algorithms' Population Diversity[J].Journal of Harbin EngineeringUniversity,1999,20(4):27-33.
[5]Smith R C.Inverse compensation for hysteresis in magnetostrictive transducers[J].Mathematical and ComputerModeling,2001,33(1-3):285-298.
[6]Smith R C,DAPI NO M J,SEELECKE S.A free energy model for hysteresis in magnetostrictive transducers[J].Journal ofApplied Physics,2003,93(1):458-466.
[7]王小平,曹立明.遗传算法—理论、应用与软件实现[M].西安:西安交通大学出版社, 2002:68-69.
[8]金鸿章,王科俊,何琳.遗传算法理论及其在船舶横摇运动控制中的应用[M].哈尔滨:哈尔滨工程大学出版社,2006.
[9]曾令儒.电磁学计量[M].北京:原子能出版社,2002.
[10]Calkins F T,Smith R C,Flatau A B.Energy-based hysteresis model for magnetostrictive transducers[J].IEEE Transactions onMagnetics,2000,36(2):429-439.
M odeling and Parameter Identification for GiantMagnetostrictive Actuators Applied in Driving SegmentedM irrors
XU Peng-you1,YANGBin-tang1,MENG Guang1,TAN Xian-tao1,YANGDe-hua2
(1.National KeyLaboratory ofMechanical System and Vibration,Shanghai JiaotongUniversity,Shanghai 200240,China, Email:rollingstone@sjtu.edu.cn;2.NationalAstronomicalObservatories/Nanjing Institute ofAstronomicalOptics and Technology, Chinese Academy of Sciences,Nanjing 210042,China)
The research in this paper focuses on establishing an accurate displacement model for giant magnetostrictive actuators(G MA)that may be istalled in a very large telescope to drive its segmented mirrors.A hierarchical genetic algorithm(HGA)is proposed and employed to identify the parameters for effectively deploying the G MA model.In practice,the HGA is proved to be able to avoid the problem of conventional genetic algorithms that the algorithms converge to suboptimal solutions.The HGA allows more initial population diversity in calculation and practically i mproves significantly the accuracy in predicting the actuator displacement.The deviations between experimental data and predicted values are less than 1.3% across the entire displacement range.Comparisons between the predicted values and experimental results imply that the established model precisely describes the hysteretic behavior and displacement characterization of G MA.The paper also analyzes effects on the key parameters in the model(such as hysteresis,loss, saturation magnetization,and saturation magnetostriction)from the applied magnetic field strength and the prestress level.
Segmented mirror;Giant magnetostrictive actuator;Hierarchical genetic algorithm;Jiles-Atherton model;Population diversity
T M27
A
1672-7673(2010)02-0150-08
CN 53-1189/P ISSN 1672-7673
国家自然科学基金(10778620);上海市浦江人才计划(08PJ14061)和机械系统与振动国家重点实验室开放基金(MSV2009-15)资助.
2009-06-08;修定日期:2009-09-09
徐彭有,男,硕士,研究方向:智能材料驱动,Email:rollingstone@sjtu.edu.cn