一种高精度调焦机构设计
2010-09-18林为才王晶
林为才,王晶
(中国科学院 长春光学精密机械与物理研究所,长春 130033)
在现代光学镜头设计中,变焦距镜头是一个不可缺少的部分,为了实现对目标的连续跟踪捕获,镜头焦距必须实时进行调整,而实现变焦的关键在于调焦机构,调焦机构组件主要用于在目标的距离或者环境温度发生变化时,调整目标的像面位置,保证变焦距镜头的图像清晰。否则离焦会降低目标的清晰度,影响跟踪和测量的效果[1]。本文介绍了一套高精度调焦机构,由步进电机、直线导轨、电位计等组成,由距离信息与温度传感器测量得到的温度信息,通过接口电路送入调焦控制器并计算出调焦量。摄像机由步进电机驱动,通过齿轮变速和精密丝杠速比变换机构,带动摄像机前后移动来进行距离调焦和温度调焦。通过调焦控制电路驱动步进电机运行,从而实现自动调焦,保证在像面上始终得到清晰的目标图像。
1 调焦机构的原理和组成
如图1所示。调焦系统调整放置在望远镜光路中的摄像机,移动摄像机改变镜头的像面位置。摄像机的移动量,是根据机下计算机发出的距离信息,由DSP模块控制。自动调焦系统利用电位计作为检测元件,电位计将位移变化转换成电压信号,电压信号的大小对应移动的距离。根据牛顿公式,计算像面位置误差,如果误差不等于零,DSP控制步进电机带动摄象机移动,同时也带动电位计向减小误差方向运动,直至误差趋近于零,系统处于平衡状态[2,3]。
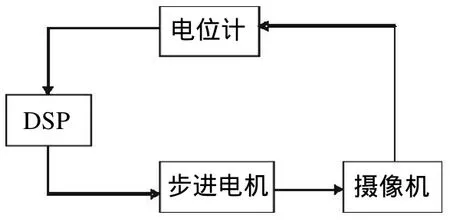
图1 系统原理图Fig.1 The element of system
调焦组件采用丝杠导轨机构,主要由精密丝杠螺母副、THK导轨、滑板、减速箱、电位计、步进电机等组成,如图2所示。
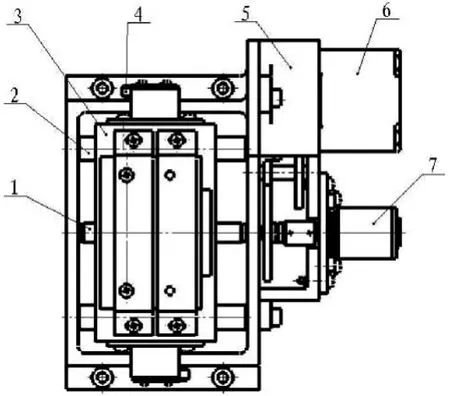
图2 调焦机构结构图Fig.2 The structure of focal system
由步进电机通过减速箱驱动精密丝杠螺母副转动,带动滑板前后移动,滑板依靠 THK高精度导轨保证前后移动的直线性,摄像机和滑板连接在一起移动,通过电位计的转动反馈摄像机的移动量,从而保证系统的调焦精度。
2 调焦机构的计算
2.1 调焦机构的像面移动分辨力计算
步进电机转一圈所走的步数为 360/0.9=400步,螺旋传动螺距选用0.5mm,因此步进电机每转一步,镜头移动0.5mm/400步=0.00125mm;
步进电机与螺旋丝杆之间用齿轮传动,选用的齿轮模数为0.5,齿轮的厚度为3mm,由步进电机到螺旋丝杆的速比为36:1。
由于受机构爬行等因素的影响,实际分辨力要略大于0.035m,能满足像面的调整要求。
2.2 调焦机构的电位计分辨力计算
由于螺旋丝杠的螺距选用0.5mm,所以2mm的传动范围内丝杠也将转动4圈。
由于电位计与丝杠同轴,速比为1,所以电位计的转角 4×360°= 1440°
选用5圈电位计可满足要求,电位计精度为1‰,5圈电位计控制的转角误差为5×360×1‰=1.8°,丝杠螺距0.5mm,电位计的分辨力为0.5×1.8/360=0.0025mm,电位计的分辨力满足要求。
2.3 调焦机构的调焦量计算
可见光光学系统的作用距离初始设计均以无限远计算,近距离时通常用前组调焦也可以用像面调整。短焦光学系统,可以不用调焦;长焦光学系统,距离大于5km,可以不用调焦,我们假设目标距离为500m,调焦量1.28mm。
如果温度调焦范围为-30℃~+50℃,设装调时或检测时标准温度为20℃,镜筒材料为铝,可求出该系统的温度调焦量如表1。

表1 温度调焦量Tab.1 Temperature focal quantity
由上述两项计算可得:系统调焦镜组的最大调焦量不大于±1mm,在该系统的调焦机构实际设计中,实际调焦量为±5mm,满足调焦范围的要求。
2.4 调焦机构的驱动力矩计算
步进电机带动齿轮减速器运行,带动螺旋丝杆运动,为了步进电机可靠地运行,选择42BYG015步进电机,调焦机构的转动惯量计算如表2所示。
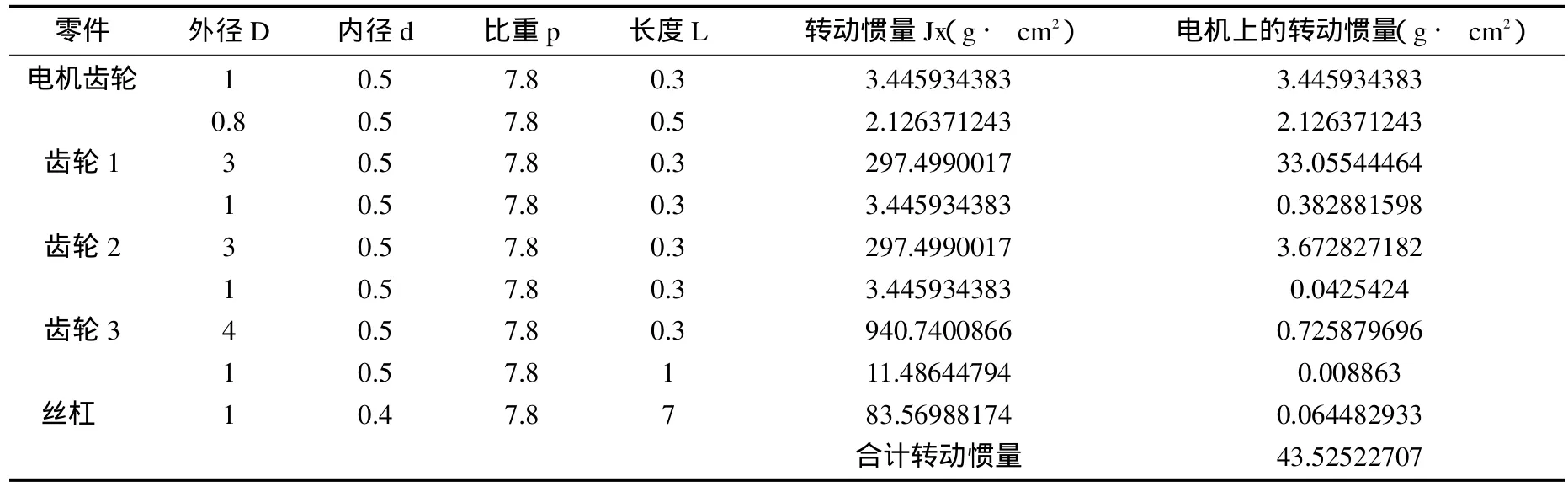
表2 调焦机构的转动惯量计算表Tab.2 Moment of inertia calculate for focal system
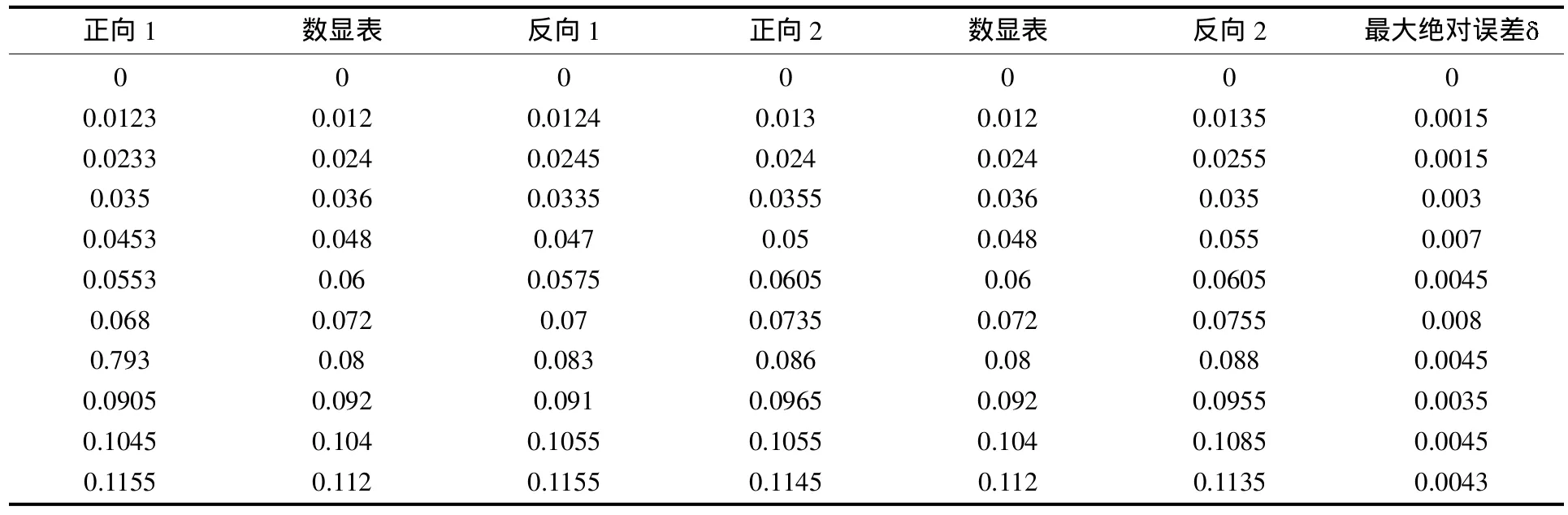
表3 实验数据对比表Tab.3 The data system experiment contrast
调焦机构的移动组件重量为1.2kg,对于移动组件的移动惯量为:

式中:W—移动体的重量;P—螺距。
总惯量为:

步进电机的运行由于是冲击式的运动,所以其加速力矩Ta为:
负载力矩T1的计算:

式中:F—轴向载荷(kg);F0—预加载荷(kg);W—移动载荷的重量(kg);P—螺距(cm);D—丝杠直径(cm);—摩擦系数(0.3);—变换效率(0.3~0.6);I—减速比=n电机/n丝杠;s—步距角;ZR—转子齿数;f1—启动脉冲速度;
安全系数取2,电机所需的转矩T:
Tm=(Tl+Ta)×2=(0.212+0.0014)×2=44mN·m;42BYG015步进电机的静转矩130 mNm,可以满足使用要求。
3 实验结果和精度影响因素
3.1 实验结果
为了测试调焦机构的实际定位精度,利用数显千分表为检测工具,将电位计测量的位移数与数显千分表测量的位移数进行对比,对比结果如表3所示,测试现场环境条件如下:大气压力 102.53kPa;室温25.03℃;相对湿度77.25%;电机温度28℃。
由表3数据可以看出,在正反四组共40次的测量中,最大绝对误差在0.005mm内,而光学系统的焦深都大于0.01mm,所以本调焦机构的的精度可以满足系统调焦的要求。
3.2 精度影响因素分析
本系统产生误差的原因主要有以下几点:
1.电位计的误差。直线的定位精度主要取决于位置检测元件的精度,如分辨率、线性度等[4]。电位计的精度为1‰,5圈电位器控制的转角误差为5×360×1‰=1.8°,丝杠螺距0.5mm,电位计的分辨力为 0.5×1.8/360=0.0025mm。
2.步进电机自身精度的影响。电机在运行过程中的发热、隔磁、防护等问题对定位精度都有影响,步进电机每步走 0.9°,螺旋传动螺距选用0.5mm,因此步进电机每转一步,镜头移动 0.5mm/400步=0.00125mm,对步进电机的控制误差不大于一个步进角,因此误差为0.0012mm,因此对电机的控制系统要求也很高。
3.直线导轨的直线以及安装误差也会影响系统的精度,本文选用日本 THK株式会社的小型可调整式(RSR)滚动直线导轨,摩擦系数为0.002~0.005,且动、静摩擦系数相差级小,可以有效的避免爬行现象,定位精度可达到0.001mm。
本系统产生的理论最大误差为0.0047mm,和实验结果的最大绝对误差0.005mm基本相符合。
4 结论
以步进电机作为动力源,以高精度导轨作为移动副,将调焦机构进行优化设计,并配以高精度的位置检测元件和控制系统时,可以达到很高的精度,此种高精度调焦机构主要用于精密测量光学系统中。
[1]丁亚林,田海英,王家骐.空间遥感相机调焦机构设计[J].光学精密工程,2001,9(1):35-38.
[2]王志伟.基于直线电机和光栅测量系统的精确定位平台设计[J].苏州大学学报,2004,24(6):38-41.
[3]吴玉厚,宋德儒.PMAC下直线电机定位精度分析与误差补偿技术[J].沈阳建筑大学学报,2005,21(5):586-590.
[4]张新洁,严昌翔.星载光学遥感器调焦机构设计[J].光学精密工程,2009,17(11):2758-2761.
