超轻型无人机光电侦察平台升降机构设计
2010-09-18田素林
田素林
(1.中国科学院 长春光学精密机械与物理研究所,长春 130033;2.中国科学院 研究生院,北京 100039)
无人机由于体积小、航时长,为节省燃油增加续航能力,通常起飞重量较轻,对载荷的重量要求也比较严格,所以机载光电侦察设备在重量上受到严格限制。同时,为减少迎风面积,外挂的光电侦察平台外形一般为球形结构。在实际飞行时,无人机从起飞点到工作区域或执行完任务从工作区返回起飞点这一过程中,光电平台停止工作,而这时外挂在机腹下的光电稳定平台所产生的风阻力对飞机燃油的消耗影响甚大,所以在无人机未到达工作区域或完成任务返航时,为减少飞行阻力,一般要求光电平台能够收回机腹内。为此设计光电平台升降机构来解决这一问题。升降机构是无人机载光电侦察平台的重要辅助设备,功能简单,但却是侦察平台的重要一环。一般在无人机到达工作区域时将光电平台放下,完成任务准备返航时将光电平台收起。如其失效,会给无人机执行任务带来严重影响,甚至导致整个飞行侦察工作无法展开,飞行任务失败。因此设计的升降机构要具有刚度高、重量轻、可靠性高、结构尽量简单的特点。
1 升降机构的工作原理及实现方式
1.1 升降机构结构形式的选择
实现升降的结构类型有连杆机构、链轮机构、丝杠丝母机构或者复杂的传动机构,无人机机载设备结构设计的基本原则是结构简单,可靠性、稳定性好,刚度强度高。机构升降活动的动力可由直流电机通过多级减速后获得的较大驱动力提供。通过以上几种机构的优缺点比较。采用丝杠丝母机构和梯形螺纹设计的升降结构能够获得稳定的升降,并且能够保证结构自锁,其丝杠升降的原理图如图1所示。
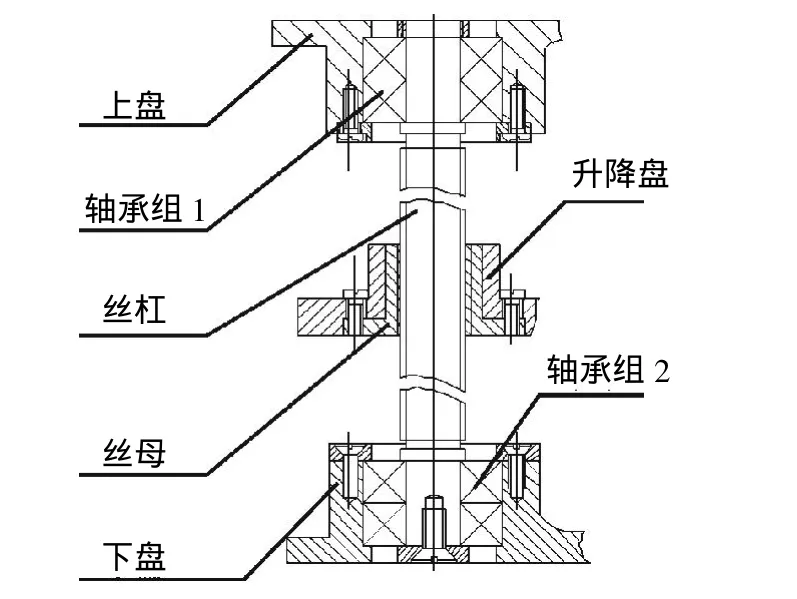
图1 丝杠升降原理图Fig.1 Principle of ascending and descending structure
1.2 升降机构的工作原理和工作流程
升降机构如图2所示,其基本工作原理及工作流程简述如下:电机轴旋转,电机轴上的齿轮一同转动,带动丝杠上的大齿轮转动,丝杠转动,丝杠上的丝母沿着丝杠轴线做直线运动。而升降盘与丝母通过螺钉紧密联结成一体,因而实现升降盘升降动作。升降机构工作流程图如图3所示。
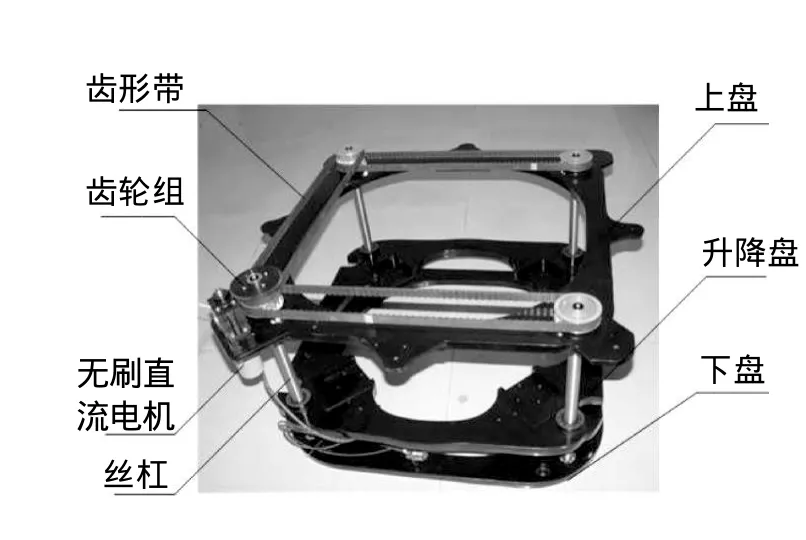
图2 升降机构Fig.2 Ascending and descending structure
1.3 升降机构的主要技术指标
由于升降机构作为机载光电平台的辅助设备,其工作时间仅为光电平台初始工作和即将结束阶段,其余时间只要保持结构稳固即可,因此升降机构要求工作可靠、结构坚固,同时由于无人机对重量要求严格,所以升降机构重量应尽量轻。升降机构的主要技术指标如下:
(1)负载重量:70kg
(2)升降行程:240mm
(3)升降时间:小于1min
(4)升降机构重量:12kg
2 超轻型升降机构结构设计
由升降机构技术指标可以看出,升降机构承重大,自身重量轻,自身重量约为承重重量的0.17,同时刚度好,稳定性高,因此需要采用特殊的设计方法设计此结构。
设计的升降机构基本结构如图2所示,直流电机通过齿轮减速带动丝杠轴转动,并由同步齿形带带动其余三根丝杠同步转动,使升降盘作上下直线运动,从而带动升降盘上的光电平台上下运动。四根丝杠同时转动使每根丝杠既起到承力作用,又起到导向作用。按照传统设计方法,应该为丝杠增加导杆,最初设计时考虑使用两根丝杠两根导杆的方式,运动比较平稳,但要求升降盘的刚度要好,这样会增加升降盘的重量。采用四根丝杠则增加了2个支撑点,增强了结构稳定性,减轻了支撑板(升降盘)的重量。取消导杆而增加两根丝杠,由于结构过定位,又要求升降盘运动平稳,对结构装调提出了较高要求。实验表明,经过精心装调的四根丝杠的升降机构,运动平稳,与具有两根导杆的升降机构运动平稳性相当。表1为两根丝杠的升降机构与四根丝杠的升降机构的比较表。通过比较,可以看出,两根丝杠+两根导杆的升降机构较四根丝杠的升降机构重量重了约2.4kg,而结构的刚度与稳定性却不如四根丝杠的升降机构。此外,为了减轻重量,结构的上下支撑盘之间没有连接,安装时由上、下盘上的各四个安装螺孔与飞机相连,在安装升降机构时上下盘分别与飞机框架连在一起,构成一体。表1为两根丝杠的升降机构与四根丝杠的升降机构的比较表
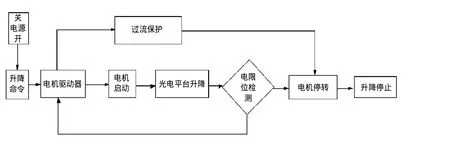
图3 升降机构工作流程Fig.3 Flowchar of ascending and descending structure
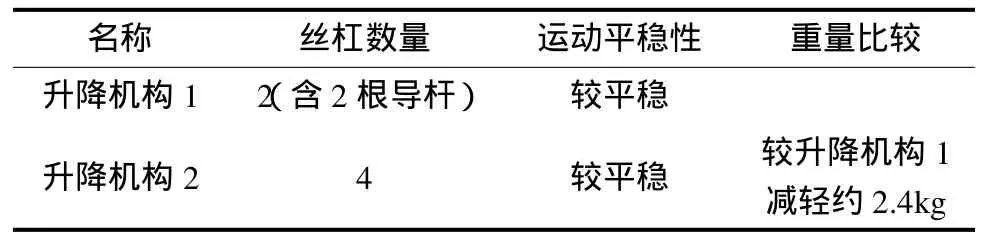
表1 两根丝杠与四根丝杠的升降机构的比较表Tab.1 Comparison of two screws and four screws of ascending and descending structure
2.1 丝杠的设计
丝杠的螺纹采用强度和对中性优异的梯形螺纹,可以消除因磨损而造成的间隙。由于要保证结构的自锁性能,需要采用单头螺纹而不能用多头螺纹或滚珠丝杠。粗算丝杠参数如下:
通过计算来保证丝杆强度和稳定性,其强度计算公式如下。

对于受压且具有较大柔度的丝杠,在工作时螺杆可能由于失稳而产生侧向挠曲,所以应对丝杠进行稳定性校验,按照欧拉公式(2)进行计算。


2.2 支撑板的设计
决定升降机构重量的是上、中、下三块支撑盘的重量,因为丝杠丝母是通过稳定性计算并留有一定裕度后确定其直径和长短的。在保证结构刚度与强度的前提下,上、中、下三支撑盘的重量应尽量轻。因此采用碳纤维复合材料作为三块支撑盘的主体材料以减轻重量。图4为采用碳纤维复合材料的升降机构安装盘及升降盘。
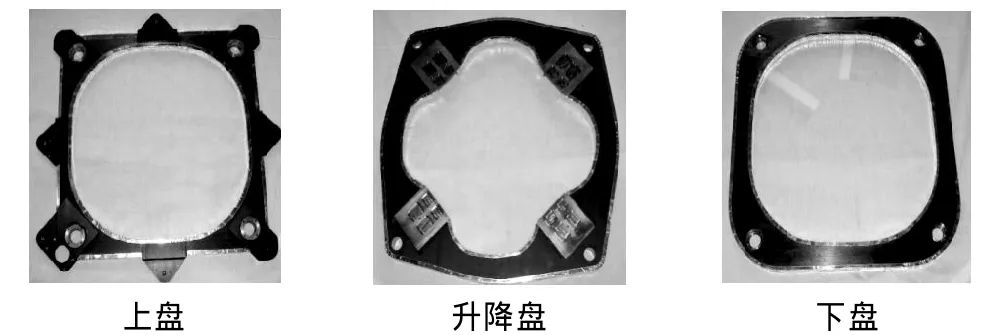
图4 碳纤维复合材料的支撑盘及升降盘Fig.4 Support boards and lift board made of carbon fiber
碳纤维复合材料具体结构由铝蜂窝夹层板、钛合金预埋件、钛合金加强件组成。蜂窝板结构为Ⅱ类铝型材,公称密度53kg/m3,厚度为16mm;上下蒙皮采用 T700碳纤维,蒙皮厚均为1.5mm,在四个开口处用钛合金金属件加强。在夹层板四角连接孔处加钛合金预埋件,角耳板立面处宽度为30mm,厚度为3mm,T700/环氧单板性能参数如表2所示,铝蜂窝性能参数如表3所示。
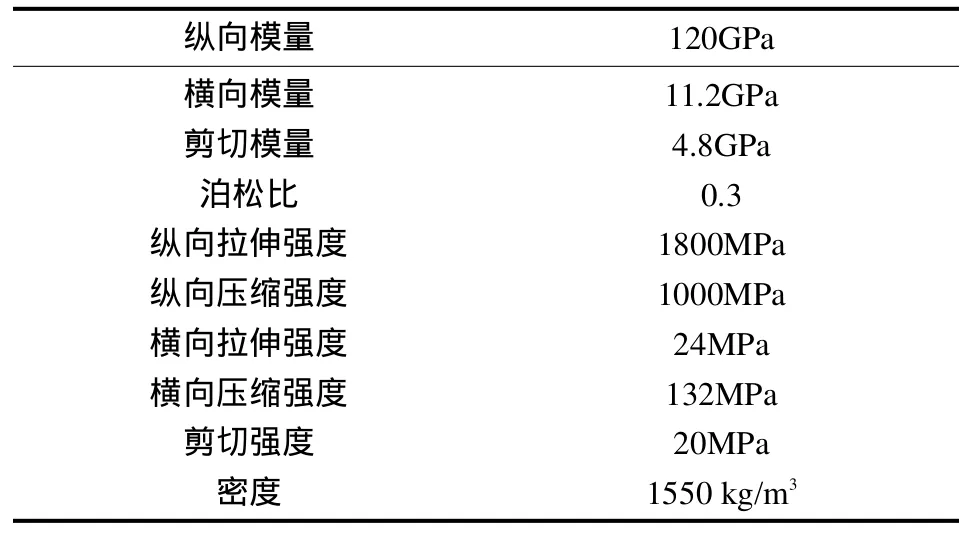
表2 T700环氧单板性能参数表Tab.2 Parameter of T700/epoxy
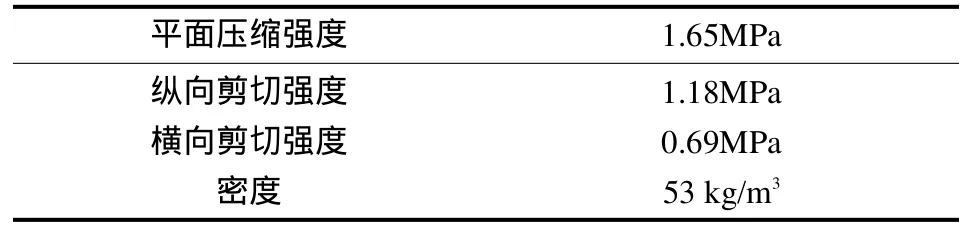
表3 铝蜂窝性能参数表Tab.3 Parameter of aluminum beehive
2.3 支撑盘的受力理论及有限元分析
由于不同于金属材料的各向同性,碳纤维/铝蜂窝复合板的材料特性是线弹性各向异性的,其应力应变关系按照广义胡克定律(4)进行计算:其中为材料在应力为时的应变,矩阵为材料的柔顺矩阵。
节点位移与单元应力满足结构平衡方程(5):
按照有限元应力应变关系及结构平衡方程,应用有限元分析软件,对上盘及升降盘进行分析,模型图采用实际的结构图,如图5及图6。
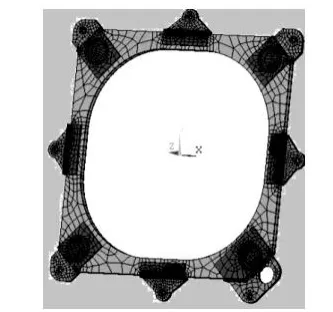
图5 上盘的模型图Fig.5 FEM of up support board
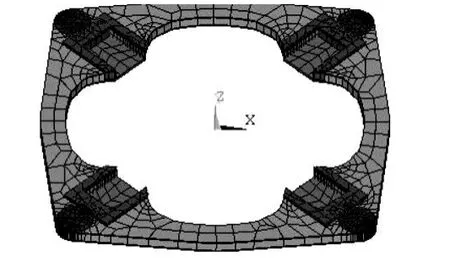
图6 升降盘的模型图Fig.6 FEM of lift board
图7是施加100kg力之后上安装盘的位移图;图8是施加100kg力之后的升降盘位移图。上盘最大变形量发生在安装孔的位置,最大变形量0.005mm;升降盘最大变形量发生在四个支撑点附近,最大变形量 0.0032mm。变形量小于指标要求,能够满足机载设备的裕度设计要求。
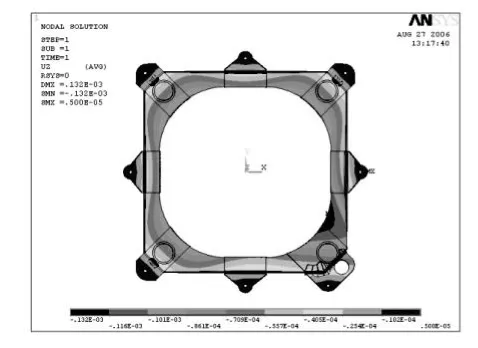
图7 上盘的计算结果Fig.7 Displacement of support board
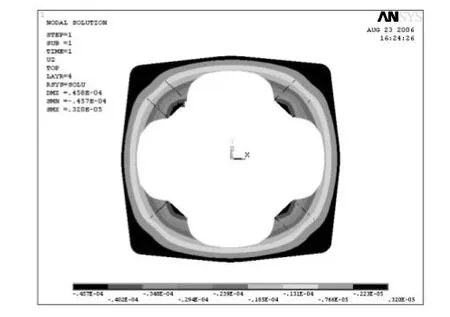
图8 升降盘的计算结果Fig.8 Displacement of up lift board
3 结论
系统的可靠性要求无人机载光电平台升降机构设计要简单,重量要轻,采用四根丝杠的结构以及碳纤维铝蜂窝夹层结构应用的上、下安装盘以及升降盘,相对于传统设计方法与铝合金材料,不仅使强度增强,同时实现减重要求。通过对分别采用经过轻量化设计铝合金材料和碳纤维复合材料制成的升降结构,进行多架次飞行试验。试验结果表明,在承载重量为70kg的光电侦察平台工作时,两套升降机机构虽然均能正常工作,但飞行试验也表明,碳纤维铝蜂窝夹层复合结构制备的升降机构在刚度、强度方面优于铝合金材料制备的升降机构,同时重量减轻4.5kg,从而增强了无人机的续航能力和飞行时间。
[1]曹福春,徐正荣.信息化战争的特点及无人机在现代战争中的应用[J].无人机,2009,2:9-12.
[2]徐灏.机械设计手册[M].机械工业出版社,1991.
[3]林再文,刘永琪.碳纤维增强复合材料在空间光学结构中的应用[J].光学精密工程,2007(8):1181-1185.
[4]许焕然,倪行达,王裴.工程中有限元方法[M].长春:吉林工业大学研究生教材,1985.
[5]田素林,白鸿柏,张葆,等.机载多框架光电吊舱无转角隔振方式设计[J].长春理工大学学报,2009,32(4):538-541.
[6]吕廷,石秀东,张秋菊,等.基于ANSYS的破碎机机架模态分析[J].机械设计与制造,2008,11:99-101.
