基于LOG算子的侧扫声呐海底线检测
2010-09-05张济博潘国富丁维凤
张济博,潘国富,丁维凤
(国家海洋局第二海洋研究所,浙江 杭州 310012)
基于LOG算子的侧扫声呐海底线检测
张济博,潘国富,丁维凤
(国家海洋局第二海洋研究所,浙江 杭州 310012)
针对侧扫声呐数据采集的特点,提出了一种基于图像边缘检测技术中LOG算子的海底线检测新方法,用于准确检测海底线从而对侧扫声呐资料进行斜距改正。通过实验数据处理,表明该方法较传统方法具有明显的优势。
海底线检测;LOG算子;灰度化;中值滤波
人类为了开发广阔的海洋,首先必须了解海底地形和地貌,侧扫声呐为此提供了一个有效的手段。自从20世纪50年代英国科学家研究出侧扫声呐后,侧扫声呐取得了飞跃式的发展。目前,侧扫声呐在海洋地质调查研究、海底找矿、工程勘察、水下目标的检测等方面都发挥着重要的作用。
在侧扫声呐图像上,水体和海底扫测图像之间存在着一条明显的界线,这就是海底线,它的作用是表示拖鱼至海底的高度[1],对其进行准确的检测是进行斜距改正的关键。在数据采集时,所得到的资料中已经记录了拖鱼的高度,但是由于目前的侧扫声呐是拖拽式的,水流和噪声等对于拖鱼的位置和姿态影响很大,造成记录的拖鱼高度不准确,尤其是在噪声很强或者海底地形变化较大时。因此,直接采用记录的拖鱼高度进行斜距改正,效果是不好的,也会造成声图地理编码时位置不准确,所以,有必要对于拖鱼的实际高度进行检测。
国际上比较著名的侧扫声纳数据采集和处理软件生产商Triton,Coda, Prism,Chesapeake等的商业软件等[2-4]目前采用的海底线检测的方法主要为最大振幅法和梯度法。为了解决在噪声比较强干扰下的海底线检测,还采用了人工干预设定初值等方法,来提高检测结果。
这些方法沿用了地震勘探数据处理中初至波拾取的原理,而没有考虑侧扫声呐数据采集的特点。地震上的初至波能量非常强,起跳明显,但是侧扫声呐为了得到更大的扫描宽度,对于拖鱼正下方的信号强度进行了压制,海底线所对应的回波有时并不是很强。因此,采用现有的这些方法虽然在大多数情况下检测结果是正确的,但是当海底线回波不是很强时,往往不能得到准确的检测结果。针对此问题,本文引进了图像处理上边缘检测中的高斯拉普拉斯算子(以下简称LOG算子)对海底线进行检测,比较好的解决了这个问题。
1 基于LOG算子的侧扫声呐海底线的检测
图像最基本的特征是边缘,所谓边缘是指周围像素灰度有阶跃性变化或屋顶状变化的那些像素点的集合,边缘两侧灰度值的突变是进行边缘检测的基本条件。在侧扫声呐图像上,海底线是水体和海底扫测图像的界限,水体中回波强度极小,而海底回波比较强,这和图像上边缘检测的基本思想是一致的,因此可以采用边缘检测的方法对侧扫声呐的海底线进行检测。边缘检测的方法有很多,如基于梯度算子的边缘检测,基于小波分析的边缘检测,基于阈值的边缘检测,基于神经网络的边缘检测。考虑到侧扫声呐的数据量较大,而且采集的数据中都含有噪声,本文选择效果比较理想的,运算量较小,并具有一定抗噪声能力的LOG算子。
1.1 LOG算子的基本原理
LOG算子来源于Marr视觉理论中提出的边缘提取思想,即首先对原始图像进行最佳的平滑处理,从而对噪声实现最大程度的抑制,再用拉普拉斯算子提取边缘[5,6]。


式中“*”为卷积运算符。式(1)中的 是高斯分布的方差,它可以作为平滑因子,用于消除空间尺度小于 的图像强度变化,数值越大,抑制噪声效果越明显,但是也会造成图像的边界变得模糊。
为了能够提取图像的边缘,还需要用拉普拉斯算子来获取平滑图像的二阶导数图像M( x, y):

由于二阶微分运算和卷积运算都是线性的,因此M( x, y)也可以表示为:

式中:

式(5)即为LOG算子的表达式。
在实际应用时,往往采用式(4)的离散形式:

式中,pk,l为原始图像的像素灰度值,为进行计算后得到的新的灰度值,K( m, n)为LOG算子的离散卷积核。本文选择5× 5的LOG算子模板,为

LOG算子具有以下特点:
第一,通过高斯平滑处理,消除了一切尺度小于 的图像强度变化;
第二,具有无方向性,可以节省计算量;
第三,定位精度高,边缘连续性好,可以提取对比度较弱的边缘点。
1.2 运用LOG算子进行海底线检测
使用LOG算子对海底线进行检测主要包括五个步骤:
第一,对侧扫声呐资料进行灰度化处理,使其满足进行边缘检测的条件;
第二,利用LOG算子对处理后的资料进行运算;
第三,对于运算后的图像进行二值化,提取海底线;
第四,对于提取的海底线进行中值滤波,剔除异常点;
第五,进行拉格朗日插值,计算边缘几Ping的海底线,得到最终的海底线。
目前的侧扫声呐数据记录主要为XTF和QMIPS两种格式[7]。这两种格式记录的回波信号强度,一般采用8比特或16比特表示。8比特表示的数值范围为0~255;16比特表示的数值范围为:0~65 535。现在一般转换为256阶灰度级[8-9]。对于8比特的情况,不需要进行其它换算过程,直接把信号强度作为灰度值对待就可以了,即

而对于16比特的情况,则需要进行灰度换算,采用式(8)进行换算:

回波强度转换为灰度值后,即可用LOG算子对灰度值进行计算。为了使进行边缘检测处理后,能够更加容易和准确的提取海底线,对进行完LOG算子计算后的图像,设定合适的阈值,进行二值化,这样可以避免由于侧扫声呐扫测图像上振幅强度更大点的干扰(例如基岩)而检测到其它的点。
所谓二值化,就是指图像上的所有点的灰度值只有两种可能,0和255,也就是整个图像呈现出明显的黑白效果。为了得到理想的二值图像,一般采用阈值分割技术,它对物体与背景有较强对比的图像的分割特别有效,计算简单而且总能用封闭、连通的边界定义不交叠的区域。所有灰度大于或等于阈值的像素被判决为属于物体,灰度值用255表示,否则这些像素点被排除在物体区域以外,灰度值为0,表示背景。这样一来物体的边界就成为这样一些内部的点的集合,这些点都至少有一个邻点不属于该物体。阈值可以通过灰度直方图来确定。进行二值化后,提取每Ping第一个灰度值为255的点,即可得到海底线。
虽然进行了高斯平滑处理去除了一部分噪声,但是水体中还残留了一些噪声,这会造成提取出来的海底线有一些异常点,可以选用中值滤波对得到的海底线进行滤波,消除异常点。
中值滤波是由J W Juley于1971年首先提出并应用在信号处理技术中的。它的原理是,取一个滑动窗口,窗口内的各点的值按照大小排列后,取中值来代替指点的值。在一维情况下时,对于奇数个元素,中值就是把窗口内的值按从小到大的顺序排列,取中间的数作为当前点滤波后的结果。对于偶数个元素,中值是指排序后中间两个元素值的平均值。
中值滤波可以有效消除异常点。其公式可以表述为

式中:Sf(x,y)为当前点f(x,y)的邻域。本文选用9× 1模板的中值滤波器对得到的海底线进行滤波。图1和图2为未进行中值滤波的海底线和进行完中值滤波的海底线比较。

图1 未进行中值滤波的海底线Fig. 1 Not being median filtered bottom track

图2 进行了中值滤波的海底线Fig. 2 Median filtered bottom track
从上面两幅图中,可以看出中值滤波没有改变海底线的形状,而且有效的消除了异常点。
无论是运用LOG算子进行运算,还是对海底线进行中值滤波,可以发现没有对边缘几Ping数据进行计算,这几个Ping提取的海底线位置是不准确的,因此需要进行插值以计算出这几个Ping的海底线位置,本文选用拉格朗日插值,这样就可以得到最终的海底线。
侧扫声呐在采集数据时高频低频同时工作,而每个频段又分为左舷和右舷两部分。因此在进行海底线检测时,可以对同一个频率的左舷和右舷同时检测,得到两条海底线,然后选取效果更好的一条海底线,利用它进行水体剔除和斜距改正。
2 应用LOG算子进行海底线检测的效果分析
为了检验本文方法的检测效果,使用本文方法对某海区的侧扫声呐资料进行海底线检测,并与侧扫声呐数据处理软件Trion Isis的检测效果进行对比。图3至图7为采用本文方法以及Trion Isis的海底线检测结果图。

图3 原始侧扫声呐图像Fig. 3 Original side-scan sonar image

图4 原始侧扫声呐数据记录的海底线Fig. 4 Original side-scan sonar data recorded bottom track

图5 Triton Isis采用Amplitude方法检测得到的海底线Fig. 5 Bottom track for Triton Isis with Amplitude method

图6 Triton Isis采用Gradient方法检测得到的海底线Fig. 6 Bottom track for Triton Isis with Gradient method
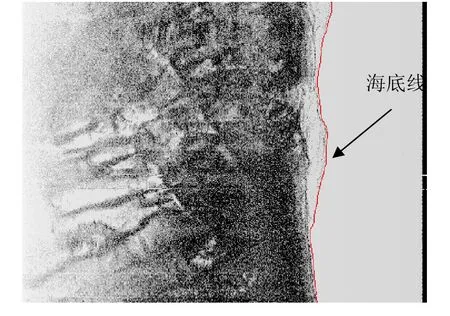
图7 采用本文方法检测得到的海底线Fig. 7 Bottom track with the method applied in this paper
本文所使用的方法在Windows XP环境下使用VC6.0编译通过,图3和图7为VC生成的图像,图4、图5和图6为Triton Isis生成的图像,由于TVG调整参数设置的不同,图像显示效果略有差异。需要说明的是为了使灰度和人们的思维相符,同时容易识别目标,在生成图像时进行了反色运算,这样回波弱的,灰度值大,亮度高,而回波强的,反而灰度值小,亮度低。
图3为原始的侧扫声呐资料生成的图像,为了突出边缘,将TVG调高。从图中可以看出,上半部分的海底线回波比较弱,相应的灰度值比较大,亮度较高,下半部分海底线回波强度增强,对应的灰度值变小,亮度变低;图4为侧扫声呐采集时所记录的海底线位置,可以看出上半部分回波弱的海底线偏离实际位置,下半部分回波比较强的的海底线位置则基本准确的;图5为Isis软件采用Amplitude方法的检测结果,可以看出检测得到的海底线比原始记录中的海底线位置要准确一些,但是对于上半部分回波弱的海底线并没有检测到准确的位置;图6为Isis软件采用Gradient方法得到的检测结果,可以看出不仅不能对回波比较弱的上半部分的海底线进行准确的检测,而且对下半部分回波比较强的海底线检测得到的位置也有些偏差;图7为采用本文方法检测所得到的海底线位置,可以看出不仅对下半部分回波强的的海底线能够准确的检测到其位置,而且对上半部分回波比较弱的海底线也能够准确的检测到其位置。
通过本文方法与Triton Isis的所使用的Amplitude 和Gradient方法检测得到海底线的结果以及与原始图像的对比,可以看出本文方法是可行的,准确的,即使当海底线回波比较弱时,依然能够得到很好的检测效果。
3 小 结
边缘检测是数字图像处理中一项常用的技术,主要用于锐化图片的边缘轮廓,提取图片特征,广泛应用于自动交通监控系统、保安系统等。本文利用海底线作为侧扫声呐水体和扫测图像边界的特点,结合边缘检测中的LOG算子,提出了一种新的海底线检测技术,比较好地解决了回波比较弱的海底线检测问题。
经过进一步研究发现,LOG算子也是有一定局限性的。LOG算子对于边缘变化比较敏感,在水深变化剧烈或者边缘比较弱时,即使有一些噪声,也可以得到很好的效果;但是当水体噪声非常强时,效果不好,这主要是因为高斯平滑滤波器只能消除尺度小于平滑因子 的强度变化,不能消除所有的噪声,当水体噪声非常强,则会误把噪声提取为海底线,难以得到准确的检测结果。这时要人工设定检测的起始点,并选取左右两舷中噪声相对较弱的一侧进行检测,才能得到比较好的检测效果。
[1] 许枫, 从鸿文. 侧扫声呐声图判别 [J]. 海洋测绘. 2001, 1: 58-61.
[2] Alberto Malinverno, Magro H.Edwards, William B F Ryan.Processing of SeaMarc Swath Sonar Data [J]. IEEE Journal of Oceanic Engineering, VOL.15, No.1, January 1990: 14-23.
[3] Triton Elics International, Inc. Isis Sonar User’s Manual [M]. 2004.
[4] Chesapeake Technology, Inc. Sonar Wiz. Map User’s Guide [M].2007.
[5] William K. Pratt著, 邓鲁华, 译. 数字图像处理 [M]. 北京: 机械工业出版社, 2005.
[6] 张太发, 程东旭, 石瑞银. 基于LOG算子的一种新的边界轮廓线提取方法 [J]. 计算机工程与应用. 2008, 44(22): 183-185.
[7] 李军, 滕惠忠. 侧扫声呐数据的格式转换及应用 [J]. 海洋测绘.2002, 22 (2): 36-38.
[8] 邓雪清, 滕惠忠, 巩丹超, 等. 侧扫声呐图像几何纠正技术研究[J]. 解放军测绘研究所学报. 2002, 23(1): 42-45.
[9] 李胜全, 滕惠忠, 凌勇, 等. 侧扫声呐图像实时增强技术 [J]. 应用声学. 2006, 25(5): 284-289.
Bottom track method in side- scan sonar data processing based on LOG operator
ZHANG Ji-bo, PAN Guo-fu, DING Wei-feng
(The Second Institute of Oceanography, SOA, Hangzhou 310012, China)
Aiming at side-scan sonar data acquisition specialty, the paper introduces a new bottom track method based on LOG operator for image edge detection. It can be used in accurate bottom track so as to make the slant range correction to the side-scan sonar data. The processed results of the actual data show that the method shows obvious advantages compared with the traditional track methods.
bottom track; LOG operator; gray processing; median filtering
P716+.1
A
1001-6932(2010)03-0324-05
2009-04-30;
2009-10-28
中国海洋大学海底科学与探测技术教育部重点实验室资助(2008-05),国家海洋局第二海洋研究所基本科研业务费专项资助(SZ0812)
张济博,(1984-),男,硕士,主要从事海洋工程地球物理技术研究。电子邮箱:eastchina10@163.com
