炮兵雷达阵地选择仿真系统的设计与实现*
2010-09-02单显明刘彬斌
单显明,张 鹏,刘彬斌
(沈阳炮兵学院,辽宁 沈阳 110162)
传统炮兵雷达阵地选择是在纸质地图上进行图上作业,根据作战任务和雷达的战技性能指标计算雷达阵地地形数据,在图上找到预定架设点,经过实地勘察确定雷达阵地位置[1]。这种传统作业模式选取雷达阵地时主要凭人的经验知识对实际地形勘察之后做出决策,缺乏决策的全面性及科学性。因此,改变传统作业模式,决策时能够最大限度地考虑雷达阵地周围的地形、地物等复杂的阵地环境是当前亟待解决的问题。
本文以“某型雷达仿真训练系统”为应用背景,通过对地理信息网格数据的三维模拟显示,在 VC++平台上首次实现了某型炮兵雷达阵地选择仿真系统,为炮兵雷达的阵地选择提供了一个直观的三维仿真平台。该系统完成了二维数字地图和三维虚拟场景之间的转换,实现了虚拟控制面板操作到天线随动再到天线瞄准镜随动的一体化,增强了仿真训练的实时性和交互性;系统能够完成多种地形和天候条件的实时生成和显示,解决了训练经费消耗大、选择地形和天候条件困难等原因造成的训练场景单一的问题;系统构建了雷达阵地评估指标计算模型和成绩评定模型,实现了雷达阵地评估过程定性分析和定量分析的有机结合,使雷达阵地评估更加科学规范。
1 系统组成及功能模块
1.1 系统组成
系统组成如图1所示。雷达操作人员通过操作数字地图实现雷达的想定管理,通过图上作业完成雷达阵地的标绘,同时将标绘结果保存至数据库,阵地选择仿真训练时,从雷达阵地数据库中得到阵地数据,仿真训练实施后进行成绩评定。

图1 炮兵雷达阵地选择仿真系统组成结构图
1.2 系统功能模块
仿真系统主要包括二维数字地图生成与显示、导调控制、三维场景生成与显示、训练成绩评估等四个 功能模块,其组成结构如图2所示。
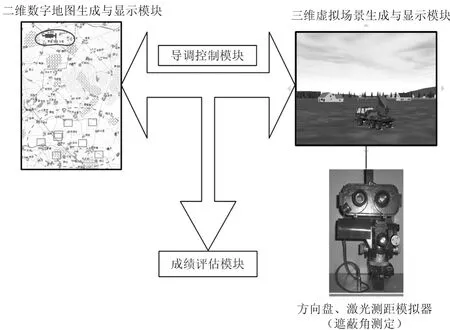
图2 系统功能模块
二维数字地图生成与显示模块根据基本战术情况自动标绘战场态势图,雷达站长根据受领的战斗情况和战场态势,在二维电子地图上预选雷达阵地并选择实时观察点。根据其选择的实时观察点,控制三维虚拟场景生成与显示模块显示站立点的观察场景。
导调控制模块根据训练需要设置训练战术情况的初始状态,并将基本战术情况下达给雷达站长,同时对训练过程中的各类状态进行监视并做出相应调整。
三维场景生成与显示模块根据二维场景生成与显示模块传输过来的数据,对战场目标态势进行初始化,虚拟生成地物、植被景象并将地物、植被实时叠加显示于战场态势侦察虚拟场景中。另根据导调控制模块设定的侦察气候数据,仿真生成各类气候条件,最后根据雷达分队指挥员在战场环境中所处地理位置和观察方向,实时仿真生成现地勘察观察到的视景情况。
训练成绩评估模块根据雷达阵地配置基本要求、雷达分队担负的作战任务、观测区域及地形条件、攻(防)战斗雷达阵地配置原则等,运用多属性决策方法对雷达分队指挥员选择的雷达阵地进行定量评估。
2 关键技术及应用
2.1 二维数字地图生成与显示
为增强仿真系统的通用性,软件采用标准的军用标准数字地图数据。军用标准数字地图采用分层管理的矢量数据结构,将不同的要素进行分类,并将各种复杂的实体具体地分为点、线、面等几何要素。矢量数据的结构紧凑、冗余度低,并具有空间实体的拓扑信息,容易定义和操作单个空间实体,便于网络分析,轻松的实现地图的无极缩放[2]。
军用数字地图的矢量数据按图幅进行组织和管理,包括公用数据文件、各要素层属性数据文件、图元数据文件、地名数据文件和高程数据文件等五类数据文件。文件由记录组成,每个文件都有一个文件头记录和一个或多个其他记录。记录由数据项组成,数据项之间以一个空格符分隔,记录之间为回车换行。由于全军的矢量地图具有保密性,而且均有很强的格式性,不能任意分割,为了使目前部队的地图能够用到训练中,我们把普通地图进行坐标变换转化为军用地图格式进行矢量化,从而达到训练各种地形的目的。
数字地图生成与显示的过程实际上是将地理要素按一定的编码要求符号化的过程。其工作流程如图3所示。
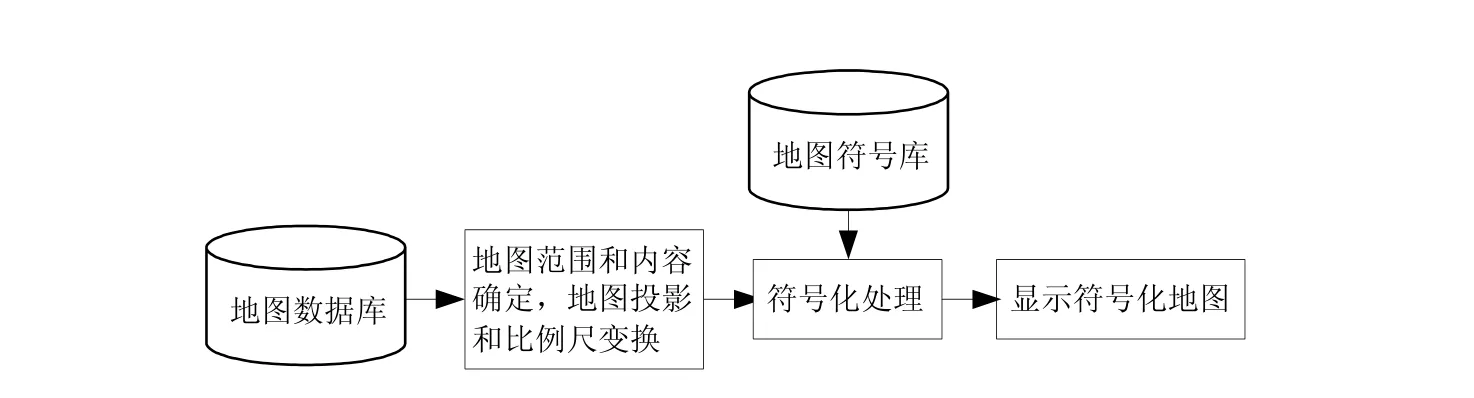
图3 数字地图显示流程图
2.2 三维场景生成与显示
由于仿真系统需要大规模战场环境的地形建模,我们在系统中采用的是600×500像素的地图,而且需要实时的显示和地形的漫游,需要很高的地形逼真度,并且战场中有大量的地物建模,需要对模型的分布式驱动,因此本系统采用MultiGen Creator进行战场环境仿真。
Creator Pro是Creator中功能强大、交互的实体建模工具,将多边形建模、矢量建模和地表产生等特征集于一体,它不但可以创建航天器、地面车辆、建筑物等模型,还可以创建诸如飞机场、港口等特殊的地域[3]。它不仅包括了Creator的所有功能,而且还增加了许多新功能,如多边形和纹理建模、矢量化建模和编辑、地表特征生成功能等,为各种模型的建立提供了便捷的条件。
Terrain Bundle是Creator中快速创建大面积地形数据库的工具,它可以使地形精度接近真实世界,并带有高逼真度的三维文化特征和图像特征[4]。它利用一系列投影算法及大地模型,建立并转换地形,同时保持与原形一致的方位。通过自动的整体纹理映射,它能生成可与照片媲美的地形,包括道路、河流、市区等特征。它的路径发现算法,比线性特征生成算法更优越,可以自动在实时三维场景中建立数千个逼真的桥梁和路口。
三维数据库是整个建模的基础,三维数据库的组织逻辑对系统的运行质量有极大影响,系统采用Open Fligh层次结构视图的数据格式。Open Flight是逻辑化的有层次的视景描述数据库,用来通知图像生成器何时以及如何渲染实时三维场景,保证对物体点、面的控制,允许对几何层的数据进行直接操作,使建模过程快捷方便。Open Flight数据库的树状结构以二进制文件方式存储,文件由一系列线性记录组成。记录的前两个区域是解析信息,定义了记录的操作码和长度,每个记录的最大长度为64kb。文件包含了节点原始记录、辅助记录和控制记录三种类型的记录。记录的长度随着记录项的增加而增加,而且所有的记录大小必须是4的倍数个字节。树的层次结构由控制记录来标识,层次结构中的每个节点都由一个主节点记录和 0个或多个辅助记录来表示。主节点记录标识一个节点的类型,并包含大部分该节点属性数据。余下的节点属性,例如注释、ID、平移变换等都存储在辅助记录中。
2.3 视景仿真的实现
仿真系统要实现方向盘激光测距机、望远镜及目视的视景仿真,直接利用Open GL进行复杂的视景仿真会耗费很多的时间,开发起来相当困难。仿真系统开发平台是Vega,它是基于底层三维图形库Open GL的开发环境,为了实现视景仿真,必须将Open GL直接引入Vega中。
下面以望远镜视景仿真为例说明视景仿真的原理。仿真关键需模拟出望远镜左右上下移动以及调焦时目镜视景的变化。虚拟场景中的三维物体要显示在屏幕上,必须经过一系列的视图变换,实际上显示的是物体在设备上的二维投影。在计算机图形学中,这种变换叫投影变换,三维投影窗口称为投影空间[5]。图4是透视投影的投影空间。透视投影的投影空间为四棱台体,延长棱台的四条棱的交点就是视点。

图4 透视变换投影体
Vega提供了对称透视投影观测体、非对称透视投影观测体和正投影观测三种观测体,其中对称透视投影观测体最为常用。通过vgChannel类来表示投影空间,通道是窗口的一部分,定义了窗口之后,可以调用 vgChanWin函数把通道加入到窗口,vgChanViewport指定通道的大小和位置。
要实现望远镜视景视图,首先必须建立一个通道,包含望远镜视景。对于望远镜的镜身进行上下左右调整的情况,可以通过对Observer的有关参数设置实现。调焦时只要知道焦距调整前的水平视场角,以及调焦前后的焦距比值,就可以得出调整后的视场角,实现光学通道的变焦功能。
3 仿真系统的实现
本文仿真系统采用 VC++、MFC、Creator、Vega及OpenGL作为开发工具,硬件环境为CPU Pentium4,1G内存,Geforce FX5200(128M显存)图形显示卡,分辨率为1024×768、刷新频率在85Hz以上,软件环境为Windows XP系统。图5所示给出了仿真效果图。其中画面左方为二维数字地图视图,左上方标绘区域为炮兵阵地,左下方标绘区域内的矩形为预选的雷达阵地;画面右上方为望远镜视景视图,右下方为方向盘操作窗口。
现地勘察操作流程如图6所示。包括方向盘激光测距机、望远镜、目视三种方式,现地勘察战场环境漫游包括虚拟方向盘鼠标操作和键盘操作控制二种操作方式,从而实现雷达视图和虚拟场景视图间的联动。
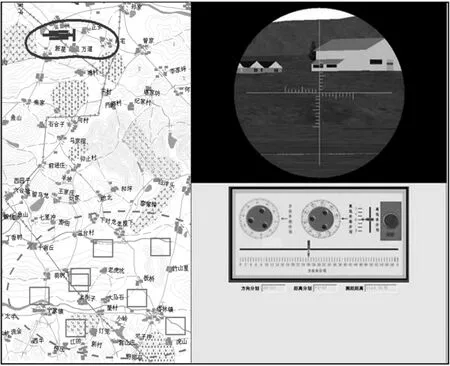
图5 仿真效果图

图6 现地勘察流程图
4 结束语
炮兵雷达阵地选择仿真系统可使受训者或雷达分队指挥员在室内完成现地勘察与阵地选择训练,同时还能对受训者的训练成绩进行定量评估。该系统模拟逼真、设计合理、功能齐全,可作为实装训练的辅助手段,具有较大的军事和经济效益。
[1]唐桂芬,钱建刚. 基于数字地图的雷达阵地选择[J].空军雷达学院学报,2003,17(3):24-27.
[2]郑昊,朱美正. 军用数字地图符号化处理技术[J].计算机工程与应用,2004,8(5):69-71.
[3]杭燚,王晓锋,杨国来. 基于MultiGen Creator/Vega的虚拟现实仿真系统[J].弹箭与制导学报,2007,27(1):339-342.
[4]叶叠,仲梁维,罗云. 基于 Vega/MultiGen的三维仿真漫游系统的研究与实现[J].计算机工程与设计,2005,26(2):362-364.
[5]董博,马立元,刘鹏远. 基于 Vega的某型导弹瞄准训练仿真[J].计算机仿真,2006,23(8):263-265.