基于HLA的某自行高炮操作模拟训练系统设计
2010-09-02孟宪刚李宏雷左晓勇罗永丰
孟宪刚,李宏雷,左晓勇,罗永丰
(1.防空兵指挥学院,河南 郑州 450052;2.解放军75134部队,广西 崇左 532200)
现代高技术条件下,自行高炮武器系统造价昂贵、生产数量有限,部署时间长,在实装上开展操作训练受到严格的制约。基于虚拟现实的操作模拟训练系统作为部队训练的辅助设备,可对操作使用人员在操作程序、异常现象处理能力等方面进行全方位的训练,可有效解决装备操作训练中的“性能”、“安全”和“成本”问题。
高层体系结构 HLA是为规划仿真开发、建模、设计整个过程中应遵循的规则而提出的。在基于HLA的仿真系统中,联邦成员之间的互操作和交互通过HLA 的运行支撑环境(RTI)来实现[1]。通过运行支撑环境RTI,提供通用的、相对独立的支撑服务程序,将仿真应用同底层的支撑环境分开,即将具体的仿真功能实现、仿真运行管理和底层通信传输三者分离,隐蔽了各自的实现细节,从而使各部分可以相对独立的进行开发。HLA的设计思想对自行高炮操作模拟训练系统的开发具有重要启示作用。本文围绕自行高炮操作模拟训练系统功能,对系统进行了方案设计,并实现了协同操作训练验证。
1 系统功能
自行高炮操作模拟训练系统旨在构建一个逼真、交互性强的训练仿真环境,操作手可根据操作任务协同地执行操作行为,系统具体功能如下:
①替代实装对操作手进行训练,操作流程、操作方法步骤符合操作任务要求;
②参训人员和装备状态、战场训练场景清晰逼真,可视性好,具有身临其境的感觉;
③系统是一个基于 HLA的分布式仿真系统,每一个操作手设计一个仿真节点,使用鼠标、键盘、操纵杆等交互工具进行交互;
④对操作行为能够做出正确响应,主要表现为所操作部件和所影响部件的状态改变;
⑤允许多操作手协同执行操作行为,保证操作行为的完整性和一致性;
⑥具有误操作判别功能,但只允许误操作进行一步,即做错了必须纠正,否则不允许进行下一步操作;
⑦具有可视化操作规程教学、训练成绩评估、资料查询功能。
2 系统方案设计
自行高炮操作模拟训练系统主要包括以下几个部分:总导演台、指挥车子系统、炮车子系统、空情模拟子系统、作战场景显示子系统和考核评估子系统等,其结构如图1所示。
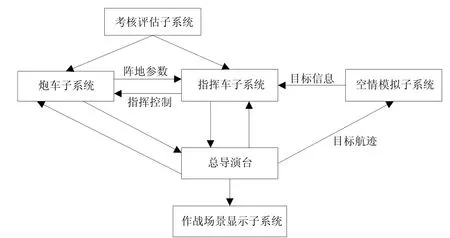
图1 自行高炮操作模拟训练系统结构图
1)总导演台
总导演台对整个操作模拟训练系统实施控制和管理,是仿真系统的控制核心。
2)指挥车子系统
指挥车子系统是整个操作模拟训练系统的控制中枢,它接受导演台下达的作战任务,搜索目标、决策指挥、对各炮车进行目标指示及分配,并向炮车下达各种战斗命令。
3)炮车子系统
炮车子系统用于完成炮车训练,包括发送炮车阵地参数,接收目标指示信息,模拟炮车的实际战斗操作、目标捕获跟踪、火力打击等过程。
4)空情模拟子系统
空情模拟子系统提供目标模型,目标模型在总导演台提供的目标航迹驱动下飞行,为模拟训练提供目标源。
5)作战场景显示子系统
作战场景显示子系统主要提供战场环境,随着战场态势变化实时显示作战进程,直观反映作战效果。
6)考核评估子系统
考核评估子系统在操作过程中对各操作手以及指挥员指挥决策进行监控、记录相关数据,并根据评估模型对协同操作训练效果进行评估。
3 系统HLA设计
3.1 系统背景想定
根据总导演台的目标航迹,空情模拟子系统发出目标指示信息,指挥车目标指示雷达适时开机,雷达发现目标,并向数据处理系统实时传输目标数据,经目标分配后向各炮车通播目标指示数据。各炮车根据目标数据决定单炮搜索雷达开机时机,发现目标后反馈“已发现目标”信息和车辆位置信息至指挥车。指挥员根据上级命令可进行人工干预,改变目标分配结果,同时,炮车和指挥车可中断数据传输,进行通话。各炮车发现目标后,在单炮搜索雷达目标导引信息下,利用火控系统光电设备进行捕获和跟踪目标。当跟踪上目标后,炮车立即向指挥车传送“已跟踪目标信息”。此时,炮手可根据环境条件选择跟踪方式,并对目标测距,当解算出射击诸元后,炮手可伺机实施射击。
3.2 系统框架设计
3.2.1 系统联邦成员设计
根据系统的具体功能,结合操作手设置情况,模拟训练系统采用两级联邦结构:车群联邦和单车联邦。车群联邦由总导演台、若干个炮车桥接成员、指挥车桥接成员、指控系统桥接成员、空情模拟子系统、协同操作训练评估成员等构成。单车联邦是针对炮车子系统和指挥车子系统建立的仿真联邦(炮车联邦和指挥车联邦),包括导演台节点、所属各操作手节点、以及用于接入车群联邦的桥接成员节点。各联邦成员组成如表1所示。
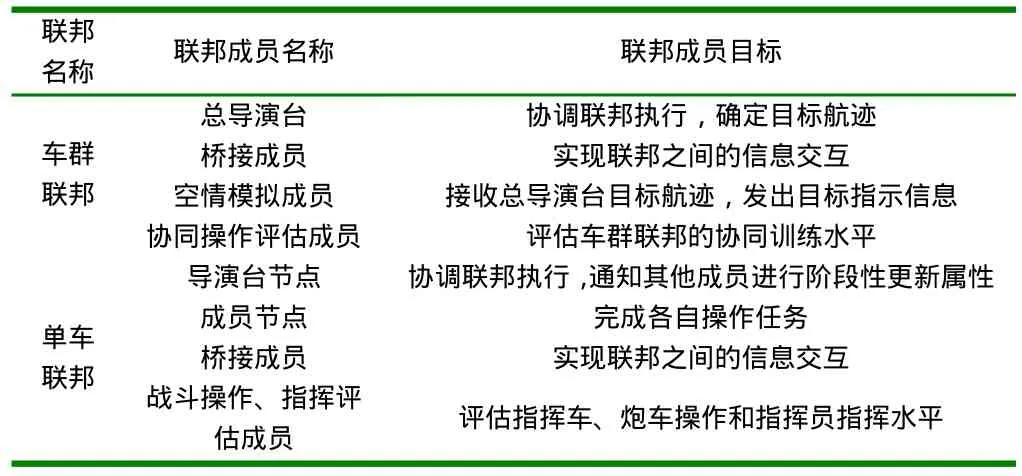
表1 联邦成员组成
3.2.2 系统框架设计
系统采用两级联邦结构,如图2所示。
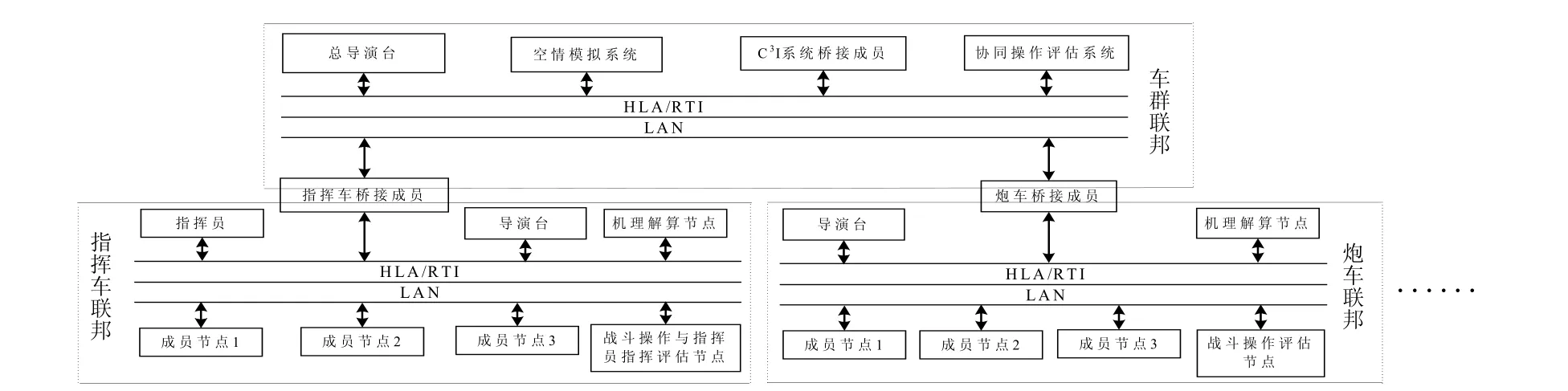
图2 自行高炮操作模拟训练系统多联邦结构
指挥车联邦包括导演台节点、机理解算节点、战斗操作与指挥员指挥评估节点、指挥员节点以及驾驶员等其他成员节点。导演台主要实现RTI的监控与管理等功能;机理解算节点是装备动力、机械、电气等方面特性的描述,是模拟器设计的核心,在仿真装备机理的基础上,为装备实体模型和战场环境模型提供可靠的数据支撑;指挥员节点是作战系统的指挥中枢,通过模拟作战指挥控制系统对各作战单元实施指挥,处理目标情报信息,进行目标分配以及下达各种作战指令等;其他成员节点在指挥员的指挥下负责各自功能操作,如车辆驾驶、目标探测、通信等任务。在指挥车子系统中,各节点通过RTI进行互联互操作,构成指挥车联邦。
炮车联邦与指挥车联邦结构类似,包括导演台节点、机理解算节点、车长节点、驾驶员节点和炮手节点,各节点间通过RTI互联互操作,组成炮车联邦。车长节点是作战指挥控制系统的重要组成部分,在指挥员指挥下协调本作战单元各号手共同完成作战任务,主要负责接收上级的各项指令和目标信息,进行目标导引,组织协调各号手完成作战任务;炮手节点主要完成对目标的搜索、捕获跟踪以及对目标的射击等操作。
3.3 联邦级信息交互处理
模拟操作过程中,系统不但传送语音信息,还有数据信息,比如指挥员发送给各炮车的目标分配信息、炮车发送给指挥车的车辆位置信息等[2]。指挥车联邦和炮车联邦通过各自的桥接成员加入车群联邦。指挥车与炮车之间的信息交互通过指挥车桥接成员和对应炮车的桥接成员进行。信息交互过程如图3所示。
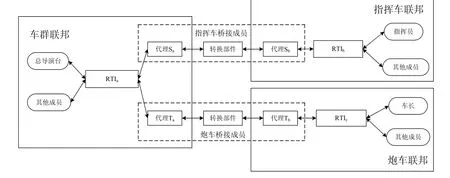
图3 联邦级信息交互示意图
桥接成员主要由代理部件和转换部件两部分组成。每个桥接成员一般包括两个代理部件,每个代理作为成员加入某一联邦中。代理从它所加入的联邦中获取联邦控制信息和对象/交互信息并转发给转换部件,由转换部件进行适当的信息转换再传输给其他相关代理;同时,代理需要从转换部件接收其他联邦的信息并通过调用RTI服务把信息发送给所加入的联邦。
4 系统协同操作模拟实现
基于武器系统作战背景,作战过程模型描述了自行高炮武器系统的操作过程,同时描述了装备之间的逻辑操作关系。各操作手仿真节点根据作战过程模型描述的装备操作和操作逻辑关系,在Virtools环境下进行模块编排,驱动虚拟实体装备模型,模拟实现装备操作过程。
按照作战过程模型对虚拟装备进行模块编排以后,在模拟训练系统上进行协同操作训练。协同操作训练主要验证相关操作及其响应的正确性和模拟训练过程是否与实际作战过程一致等。在训练之前,相关操作手需要根据操作规范理解自己的操作任务、熟悉相关设备操作以及与其他节点的协同关系;在训练展开以后,操作手按照各自任务在指挥员的指挥下密切配合,共同完成协同任务。协同操作训练主要过程如下:
1)创建联邦执行。启动导演台创建联邦,联邦执行进程开始运行。
2)联邦成员加入。各仿真节点依次加入各自的联邦,并实现联邦同步,完成系统的互联。
3)总导演台发布航迹信息。
4)目标探测子系统开始探测目标,发现目标后,通过RTI把目标信息发送给指挥员;指挥员对目标信息进行分析判断,通过指挥控制系统向炮车下达战斗准备命令,各炮车在车长指挥下进行各项战斗准备操作;目标进入作战区域后,指挥员向各炮车进行目标分配,并不断通报目标坐标信息,各炮车根据指挥员通报的目标信息搜索目标,发现目标后进行捕获、跟踪,经过火控系统解算射击诸元后伺机对目标进行火力打击,并向指挥员反馈作战结果。
5)指挥员根据空情进行新一轮目标分配,空情解除后,下达撤收命令。
5 结束语
本文针对操作模拟训练系统的特殊性,论述了基于 HLA的模拟训练仿真的设计思想和开发过程,并就 HLA在该系统中的应用进行了一定的探讨。实践证明,HLA在增进仿真模型互操作性、可重用性以及提高仿真逼真度和沉浸性方面有着独特的优势,在协同操作模拟实现过程中,虚拟装备操作及其相关逻辑响应关系正确,整个作战过程比较顺畅,比较真实地反映了自行高炮武器系统作战过程和作战要素的逻辑关系,验证了作战过程模型。
[1]周彦,戴剑伟. HLA仿真程序设计[M].北京:电子工业出版社,2002.
[2]张曦. 基于HLA的汽车操纵稳定性虚拟试验技术的研究[D].北京机械工业学院硕士学位论文,2007.
[3]史永辉. 分布交互仿真通用支撑平台的研究及应用[D].西北工业大学硕士学位论文,2002.
[4]致志刚,郭齐胜,刘军,等. 基于 UML的作战信息交换建模[J].装甲兵工程学院学报,2006,20(4):1-5.
[5]王欢,毛征,席大林. 某自行高炮模拟训练系统实时仿真技术的研究与实现[C].2005系统仿真技术及其应用学术会议论文集(第七卷):631-634.
[6]熊光楞,郭斌,陈晓波,等. 协同仿真与虚拟样机技术[M].北京:清华大学出版社,2004.
