多功能喷射混凝土机器人控制系统研究*
2010-08-31李云江窦美宁郭祥乾
李云江,窦美宁,张 辉,郭祥乾
(1.山东建筑大学机电工程学院,山东济南 250101;2.烟台工程职业技术学院数控技术系,山东烟台 264006)
多功能喷射混凝土机器人控制系统研究*
李云江1,窦美宁2,张 辉1,郭祥乾1
(1.山东建筑大学机电工程学院,山东济南 250101;2.烟台工程职业技术学院数控技术系,山东烟台 264006)
针对喷射混凝土机器人存在的问题,对产品的机械结构和控制系统进行模块化重新划分、构造,基本实现了喷射混凝土机器人的多功能化。本文介绍了无线遥控控制系统的设计与实现,包括输入信号采集电路板、无线发送模块、无线接收模块以及输出控制电路板。
喷射混凝土;机器人;控制系统
1 引言
喷射混凝土支护技术与传统的混凝土整体支护技术相比,具有强度高、减少巷道开拓量、降低支护成本、提高围岩自撑支护效能、使支护层厚度减少和加快施工进度的特点[1]。喷射混凝土机器人克服了人工喷射混凝土的许多不足,而且有效地实现了支护[2]。在国家 863计划的支持下,目前已经开发出大、中、小系列化机器人。但是,在进行试销过程中,发现该机器人作为一种专业的施工装备,有一些不足之处。主要表现在:喷射混凝土机器人产品单一,配套设施没有跟上,使得机器人在施工过程中出现了“大马拉小车”现象,严重制约了机器人能力的发挥。喷射混凝土机器人功能单一,喷射混凝土机器人只作为一台喷射混凝土的设备,在现场施工过程中闲置时间过长,尤其当用户没有隧道施工任务时,设备就闲置起来,严重影响了设备有效使用率。
喷射混凝土机器人要实现模块化构造,以便可以根据现场需要进行不同形式的改装,以扩大其适用性[3]。针对以上问题,对喷射混凝土机器人进行了改造和完善,基本实现了喷射混凝土机器人的多功能设计,限于篇幅,本文只阐述其无线控制系统的设计与实现。
无线遥控控制系统包括输入信号采集电路板、无线发送模块、无线接收模块以及输出控制电路板。输入信号采集电路板与输出控制电路板的设计采用的微处理器是低功耗单片机MSP430,无线发送接收模块选用的是无线数传模块[4,5]。
2 输入信号采集电路板
根据喷射混凝土机器人的作业轨迹,按照机器人学的运动分解过程,把描述各个关节运动的模拟量控制信号(如:腰部转动、大臂俯仰、大臂伸缩、手腕转动、喷嘴向前向后、纵臂进退等)和开关量控制信号 (如:喷嘴转动、下车油源、纵臂左右、纵臂俯仰、电机停止等)通过相关电路输入到微处理器MSP430。微处理器的 A/D转换模块的转换精度为12位,对输入的模拟信号进行数字转换处理后,根据采用的A/D转换序列通道多次转换方式将转换结果依次存入ADCMEMX中,等待处理器对它们的读取。开关量输入电路中,为了消除抖动信号对开关量输入的影响,采用了MAXI M6818开关去抖器,用以产生稳定的开关量输入信号。
本系统中所采用的 A/D转换模块是MSP430单片机内嵌的数模转换器模块,转换精度分为 10位、12位、14位三种。根据控制系统所要求的精度采用了ADC12模块,其内核是一个带有采样和保持功能的 12位转换器。
机器人的操作过程是连续的,需要将模拟量持续不间断的进行转换,因此,采用了序列通道多次转换模式。序列通道多次转换模式是对一个序列(有顺序的多个转换通道)进行持续的转换,直到用软件将其停止。A/D转换结果的存放是由ADC12控制寄存器中的 CSStar-tAdd(转换存储器地址定义位)决定,它指向第一个转换寄存器,其后的结果将顺序的存放在转换寄存器中。比如喷射混凝土机器人的一个A/D转换序列有 2个转换结果,第一个转换结果存放在ADCMEM0中,则其后的第 2个转换结果分别存放在ADCMEM1中。
在原先有线控制器中,采用的微处理器的A/D转换为 10位的,电压分辨力为:5/210=4.88mV。我们现在所采用的MSP430 ADC12模块,其工作电压为 3.6V,电压的分辨力为:3.6/212=0.88mV,完全满足了系统的工作要求。
喷射混凝土机器人的六个自由度:腰部转动、大臂俯仰、大臂伸缩、手腕转动、喷嘴向前向后、纵臂进退,都是通过遥控器上的 6个操作手柄来进行控制。每个操作手柄根据它所代表的自由度的运动路径,将它的电压分值以模拟量的形式传递给MSP430单片机。采用的A/D转换是:每次进行转换时每个电位器都进行扫描,扫描的结果以数据包的格式存依次存放在转换寄存器ADCMEMx中,对转换结果的读取也是以整体的形式进行读取。
3 开关量输入的防抖动设计
无线遥控器系统的开关量输入信号一般用来控制电磁阀和继电器。系统所涉及的开关量信号的输入是通过MSP430F147的 P1端口,这 8位端口既能用作输入和输出,同时又具有中断的能力,每个信号都可以用作一个中断源,有 7个寄存器用于输入/输出的控制。在进行信号的输入时必须要定义 P1端口的方向选择寄存器,将选定的引脚切换成输入模式。
机械开关在实际应用中不可能象数字系统希望的那样产生一个单一平稳的数字信号输出,在开关闭合和断开的时候会产生很多毫秒级的开抖动和关抖动,这是在硬件电路设计中不可回避的问题。抖动干扰的存在会使得系统在进行信号采集时产生多个计数值,如果取值错误,就会令系统的控制出错,所以在系统的设计时应当采取防抖动的措施。系统的防抖动设计有软件设计法和硬件设计法两种。
(1)防抖动设计的软件实现方法。
软件防抖动设计法就是处理器在接受到一个开关量的值时,先将其保存在一个寄存器中,利用一个时间延迟循环后再采集一次开关信号的值,两者进行比较。如果两者相同,就可以将这个结果做为系统的开关量输入值;反之,需要继续采样,直到取到两个相同的值为止。软件防抖动的优点是:不用外加硬件电路,实现起来比较的简单,缺点是:具有较大的时间延迟,占用微处理器的工作时间,如果存在多路开关信号的话,会占用较多的存储器空间。
(2)防抖动设计的硬件实现方法。
简易的硬件防抖动设计是采用电阻和电容的方法来实现,出于硬件设计方面的考虑,这种方法不适用与多路开关信号的情况下。在本系统中我们采用的是防抖动开关接口芯片MAX6818。
MAX6818是MAXI M公司生产的一个 8路开关去抖器,提供了从机械开关到数字系统的稳定接口。从一个机械开关接收到一个或多个抖动的输入,经过一个短暂的、预制限定的延时后产生一个稳定的数字输出。经过该接口芯片,操作时的开抖动和关抖动都被消除了。开关信号的输入冲击电压可达到±25V水平,工作的电源电压为:2.7~5.5V,电源电流为:6μA,完全满足本系统中所采用的低功耗要求。MAX6818防抖动延时的典型值为 40ms,最小为 20ms,最大为 60ms,能头适应性能较差的机械开关,同时具有可控制的三态输出。从图 1可以看出, MAX6818与微处理器的接口方式非常简单,只需要外接一个滤波电容,所以在硬件电路上实现起来比较容易。
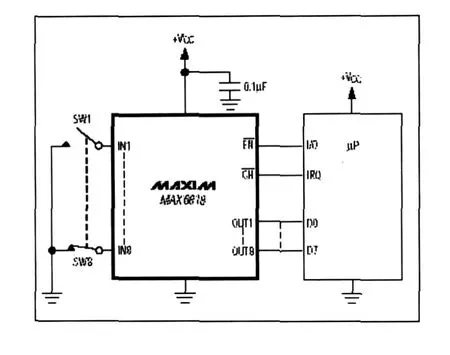
图1 MAX6818防抖动接口电路
无线遥控器对系统的开关量输入信号的读取是通过扫描 P1口的输入寄存器得到的。输入寄存器是 CPU扫描 I/O引脚信号的只读寄存器。用户不能对它写入,只能通过读取该寄存器中的内容知道I/O端口的输入信号。此时,引脚的方向必须选定为输入方式。
4 输出控制电路板
输出控制电路板是将通过无线数传模块接收到的模拟及开关量信号通过相关电路处理后驱动相应的阀块和继电器。其中模拟量信号利用MSP430单片机定时器A的输出模块功能,将控制信号转换为PWM波形输出到滤波电路和放大电路,从而完成数据的D/A转换和放大过程。开关量信号经过开关量放大电路实现驱动功能。
5 无线数传模块
本控制系统所采用的无线数传模块(包括无线发送模块和无线接收模块)FC-201-E无线数传电台,它具有透明,包容性强的 E型通讯协议,适合多种通讯场合。
(1)高、低电压之间的电平转换。
随着电子集成芯片向着小型化和低功耗的方向发展,数字系统的工作电压已经从 5V下降到 3V甚至更低的档次,所以存在很多 5V器件与 3V器件共存于一个系统中的情况。在工作实践中,由于种种实际需要,往往要求MSP430单片机与常用的、在5V电压下工作的单片机进行串行通讯,或与个人计算机进行串行通讯。因此,不同工作电压之间的电平转换是要解决的一个关键问题。
由于MSP430F147单片机的电源电压是 1.8~ 3.6V,通常,5V TTL器件可以驱动 3V TTL输入,因为典型双极晶体管的输出并不能达到电源电压幅度。当一个5V器件的输出为高电平时,内部压降限制了输出电压。典型情况是VCC-2VBE,即约 3.6V。用3V器件驱动 5V TT L的输入端应当是没有困难的。3V CMOS器件实际上能输出 3V摆幅的电压。对 5V TT L输入的高电平2V门限是容易满足的,但3V输出却不能可靠的驱动5V的CMOS器件,因为,5VCMOS器件的输入高电平要求最小的幅值为 3.8V,这是 3V器件不能做到的。显然在此电源范围内,其串行口的输出电平既不能可靠实现与 TT L电平单片机的通讯,也不能实现COMS器件及RS232接口的通讯。为此,本系统给出了一种采用MAX3221E芯片进行电平转换,从而实现MSP430单片机与(5V)单片机及 RS232进行串行通信的解决方案。MSP430与数传模块之间的通信原理图如图 2所示。
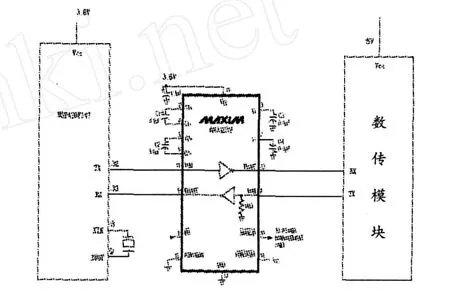
图 2 通信原理图
(2)MSP430串行通信波特率的产生。
MSP430F147的串行通信模块主要包括:波特率的产生部分,数据的接收和发送部分,硬件接口部分等。MSP430的波特率发生器与其他标准的串行通信接口适配器实现的方法不同。MSP430的波特率发生器是由一个时钟源预分频器和一个调整器组成。分频器实现分频因子的整数部分,调整器使得小数部分尽量准确。波特率发生器的结构示意图如图3所示。
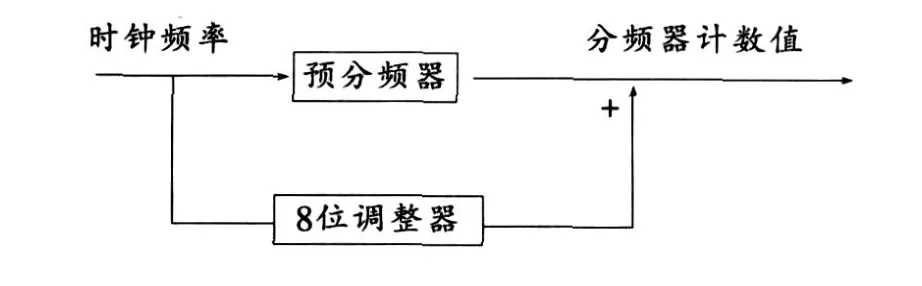
图 3 波特率发生器的结构示意图
(3)MSP430串行通信的方式。
MSP430系列的串行通信模块有两种通信协议:UART异步通信协议和 SPI同步通信协议。异步通信模式下接收器自身实现祯的同步,因此通信双方必须使用相同的波特率。异步祯的格式由 1位起始位,7位或 8位数据位,校验位,1位地址位和 1位或 2位的停止位组成,接收操作以收到有效起始位,如图 4所示:
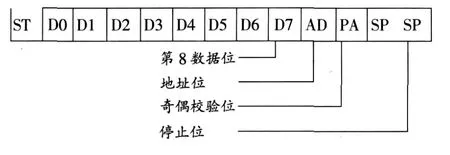
图4 异步帧格式
在异步模式下支持两种多机模式:线路空闲多机模式和地址位多机模式,实现了在多处理机通信系统间的有效数据传输,通过选择控制寄存器中的MM位(多机模式选择位)来选择采用何种模式。线路空闲模式下数据块被一段空闲的时间分隔,地址位模式下字符包含一个附加的位作为地址标志,两种模式都可以用查询方法或者中断方法来实现。
同步通信模式下允许 7位或 8位数据流以内部或外部确定的速率进行串行通信。在同步模式下接收和发送有各自的寄存器,且接收和发送为双缓冲,字符的长度为 7位或者 8位。
在串行通信的过程中,将采集到的 6个模拟量和 8个开关量的数字信号作为一个数据包进行整体发送的。为了保证数据传输的可靠性,在一组数据包传输的开始加上一个校验码 0x55做为接收模块检验数据开始发送的标志信号,在数据包的结尾加上一个校验码 0xaa作为接收模块检验数据发送结束的标志信号。如果接收模块接收到 0s55说明数据开始发送,接收模块可以进行数据接收,直到接收到信号 0xaa,方可认为一个数据包传送的结束。如果接收模块开始接收到的信号不是 0x55,则,接收模块就要进入等待直到接收到 0x55。
数据包的传送和接收主要是一个移位寄存器在起作用。在接收时,当移位寄存器将接收来的数据位组合够一个字节就保存到接收缓存URXBUF;在发送时,将发送缓存UTXBUF内的数据一位一位地送到发送端口。发送和接收两个移位寄存器的移位时钟都是波特率发生器的时钟信号 B ITCLK。串行通信时,要发送的数据保存在发送数据缓冲器中,只有发送数据缓冲器为空时,写入数据才会有效,发送才会开始。接收机通过读取接收数据缓存器中的内容来获得发送的数据。通过判断接收缓冲器中是否有数据来作为能否接收数据的一个依据。
由于串行通信是8位传送方式,MSP430单片机的A/D转换模块是 12位的,因此,将单片机的A/D转换结果进行发送和接收时需要对数据进行移位操作。发送时,将 A/D转换结果左移 4位,高 4位为0。因为我们要传送 6个模拟量和 8个开关量,转换后就变为一个数据包要传送 15个字节。MSP430的发送框图如图 5所示。
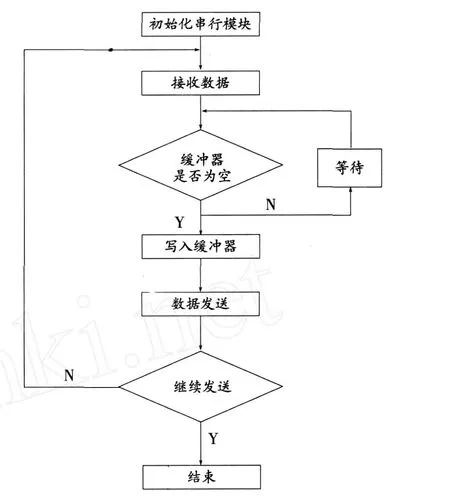
图 5 MSP430的发送框图
6 结论
多功能喷射混凝土机器人已产业化,并在东营油田某项目和珠海高栏岛 CNG地下储气项目得到应用。实践表明,该机器人可以通过多种组合适应不同的工况要求,完成规定的作业任务,其控制系统运行可靠,能满足喷射混凝土工艺要求。
REFERENCES
[1] 毛文清.锚喷技术在桥梁加固工程施工中的运用[J].铜业工程,2008,(3):73-74.
[2] 李云江,荣学文,樊炳辉,等.PRJ-Z型喷浆机器人的研制与开发[J].中国机械工程,2003,14(20):1711-1713.
[3] 王靖,李斌,马书根.模块化可变形机器人控制系统设计与变形方法研究[J].机器人,2006,(5):457-462.
[4] 王传江.PJR-X小型喷浆机器人滑模变结构控制系统[J].煤炭学报,2007,(5):548-551.
[5] 皮扬,王兴松,徐丰羽.基于 C8051F单片机的缆索检测机器人控制系统设计[J].机械工程师,2008,(12):55-57.
Study on the Control System ofM ultifunctional Shotcrete Robot
L I Yun-jiang1,DOU Mei-ning2,ZHANG Hui1,GUO Xiang-qian1
(1.School ofMechanical and Electronic Engineering,Shandong Jianzhu University,Ji’nan,Shandong,China 250101; 2.Depart ment ofNumerical Control Technology,Yantai Engineer and Technology College,Yantai,Shandong,China 264006)
〗To counter the main shortcomings of spray concrete,the products ofmechanical structure,control systems and other parts of the modular function are re-plotted and restructured.The robot’smultiple function features is basically achieved.This paper introduces the design and implementation of the wireless remote control system,including input signal acquisition board,the wireless trans mission module,wireless receivermodules and output control circuit board.
Shotcrete;Robot;Control system
book=66,ebook=71
TD403
A
1009-3842(2010)02-0066-04
2010-04-01
山东省科技厅科技发展计划项目(021050103)
李云江(1966-),男,山东莱阳人,硕士,教授,主要从事特种机器人技术的教学与研究。E-mail:liyunjiang38@126.com
