无源控制的超混沌Chen系统的自适应同步
2010-08-30傅桂元李钟慎
傅桂元,李钟慎
(华侨大学机电及自动化学院,福建 泉州 362021)
无源控制的超混沌Chen系统的自适应同步
傅桂元,李钟慎
(华侨大学机电及自动化学院,福建 泉州 362021)
在不同初始条件下,提出一种基于无源控制理论的控制方法,实现具有参数不确定性的两超混沌Chen系统的自适应同步.通过引入自适应控制,在线估计系统的参数,并设计一个自适应无源控制器,使两系统的同步误差方程转化为无源系统.根据无源系统理论,系统的动态误差方程将稳定于状态空间原点,即两超混沌Chen系统完全同步.仿真结果表明,所设计的控制器简单明了,控制方法有效.
超混沌Chen系统;同步;无源控制;自适应控制
近年来,人们提出各种控制方法实现两混沌系统的同步,包括自适应控制[1]、反步法控制[2]、滑模变结构控制[3]、线性及非线性反馈控制[4]、主动控制方法[5]、线性矩阵不等式[6]等.但是,上述方法设计的控制器或过于复杂,或是只适用于具有参数严格反馈形式的一类混沌系统,在实际应用中仍受到很大的限制.对于存在振荡的不稳定性系统,为了使系统内部稳定,可以依据无源理论构造反馈控制器,使得相应的闭环系统无源而保持内部稳定.文[7]将无源系统理论应用到非线性系统的镇定.文[8]基于无源控制的方法,实现对Lorenz混沌系统的控制,使其稳定到零平衡点和非零平衡点.本文提出一种基于自适应无源控制的方法实现两超混沌系统的同步.
1 无源控制系统
考虑仿射非线性系统,有

式(1)中:状态变量x∈Rn;外部输入u∈Rm;系统输出y∈Rm;f和g的m列为光滑的向量场;h为光滑映射.
定义1 系统(1)称为无源系统,如果其满足对于∀t≥0,存在一个实常数β,使得不等式

成立,或者存在ρ>0和一个实常数β,使不等式

成立.
从定义1可以看出,无源非线性系统的物理意义非常明显,即系统只能通过外部输入来增加能量.从反方面考虑,可以利用无源系统的这个物理特性,通过施加外部控制来逐步减少非线性振荡系统的能量,从而降低系统输出幅度,实现系统的稳定.
引理1[9]如果系统为无源系统,令φ为光滑函数,则必然存在控制律u(t)=-φ(y),使非线性系统在平衡点处渐近稳定.
令z=θ(x),则系统(1)可以化为如下形式

定理1 假定系统(1)为最小相位系统,x=0是系统(1)的平衡点.若系统(1)在x=0处具有相对阶[1,1,…,1],则系统(4)可以通过局部反馈控制等效为一个无源系统,且其选择的反馈控制器为

式(5)中:W(z)为f0(z)的Lyapunov函数;k为任意大于零的常数;v是与输入u有关的外部输入量.
证明 选取系统的Lyapunov函数为

两边求导后,可得

由于系统(1)为最小相位系统,即系统(4)也为最小相位系统,则有

由此可得

对式(9)两边积分可得

由式(6)可知,V(z,y)≥0.令V(z0,y0)=μ,则式(10)可改写为

因此,由定义1可知,系统(4)为无源系统.
2 基于无源控制的超混沌Chen系统的同步
Chen系统的动态微分方程[10]为

式中:xi(i=1,2,3,4)为系统的状态量;a,b,c,d,r为系统参数.当a=35,b=3,c=12,d=7,0≤r≤0.085时,系统(12)表现出混沌特性;而当0.085≤r≤0.798时,系统(12)为超混沌系统.
假定系统(12)为驱动系统,其响应系统的动态微分方程为

定义同步误差e1=y1-x1,e2=y2-x2,e3=y3-x3,e4=y4-x4,且系统参数a,b,c,d,r未知.控制目标是在控制器u的作用下,使驱动系统(12)与响应系统(13)在不同初始条件下,其误差满足
其中:tf为大于零的一时间值.两超混沌系统的同步动态误差方程为

定理2 对于系统(2),根据定理1,当控制量u为

系统(14)将渐近稳定于状态空间原点,即系统(12)与系统(13)将达到完全同步.式(15)中:^a,^c,^d分别为系统参数a,c,d的估计值,且其自适应更新律为

式(16)中:hi(i=1,2,3)为任意大于0的常数.
注1 由于控制器u只与系统参数a,c,d有关,而与b,r无关,因此只需估计参数a,c,d即可.
证明 令z1=e1,z2=e3,z3=e4,y=e2,则动态误差方程(14)可改写为

将式(17)改写成式(4)的形式,则有

由定义2可知,系统(17)为最小相位系统.取系统(17)的Lyapunov函数为

两边求导后可得

联立式(15),(16),(17),可得

因此,由定理1可知,系统(17)为无源系统.证毕.
3 数值仿真
令驱动系统(12)各状态变量的初始值[x1(0),x2(0),x3(0),x4(0)]=[0.5,0.5,0.5,0.5];响应系统(13)状态量的初始值[y1(0),y2(0),y3(0),y4(0)]=[1,1,1,1];系统的动态误差初始值为[0.5,0.5,0.5,0.5].由于驱动与响应系统均为超混沌Chen系统,选取其系统参数的估计初值为(0)=1,(0)=1,(0)=1,设计参数h1=5,h2=7,h3=9,k=5.
为了便于比较,在t=10s时,响应系统(13)才加入控制器u.驱动系统和响应系统的同步输出及误差曲线,分别如图1,2所示.由图2可知,驱动系统(12)与响应系统(13)在控制器u的作用下很快达到同步,其误差快速趋于零,即两系统很快达到完全同步.
系统的参数a,c,d的估计值(P)曲线,如图3所示.从图3可知,随着时间的推移,参数a,c,d的估计也逐渐收敛于某一常数值.
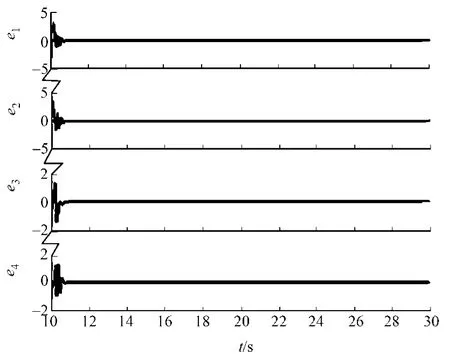
图2 系统同步误差曲线Fig.2 Curve of system synchronization error
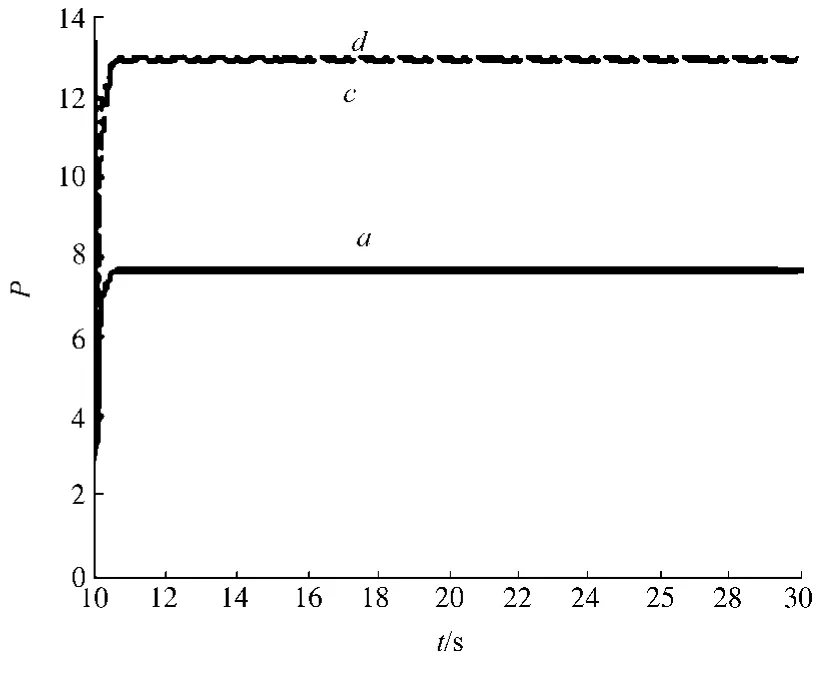
图3 系统参数的估计值曲线Fig.3 Curve about estimation value for system parameters
4 结束语
提出一种基于无源控制的方法实现,具有参数不确定性超混沌Chen系统的同步.通过自适应控制在线估计系统的参数,设计一个自适应控制器使系统的同步动态误差方程为无源系统.根据无源控制理论,将动态误差系统稳定到零平衡点,即实现两Chen系统完全同步.采用无源控制设计的控制器简单明了,其物理意义更为明显.
[1]PARKJ H.Adaptive synchronization of hyperchaotic Chen system with uncertain parameters[J].Chaos,Solitons& Fractals,2005,26(3):959-964.
[2]WANG Bo,WEN Guang-jun.On the synchronization of a class of chaotic systems based on backstepping method[J].Physics Letters(A),2007,370(1):35-39.
[3]HUANG Li-lian,FENG Ru-peng,WANG Mao.Synchronization of uncertain chaotic systems with perturbation based on variable structure control[J].Physics Letters(A),2006,350(3/4):197-200.
[4]CHEN H S.Global chaos synchronization of new chaotic systems via nonlinear control[J].Chaos,Solitons&Fractals,2005,23(4):1245-1251.
[5]ZHANG Hao,MA Xi-kui.Synchronization of uncertain chaotic systems with parameters perturbation via active control[J].Chaos,Solitons&Fractals,2004,21(1):39-47.
[6]CHEN F X,ZHANG W D.LMI criteria for robust chaos synchronization of a class of chaotic systems[J].Nonlinear Analysis,2007,67(12):3384-3393.
[7]LIN W.Feedback stabilization of general nonlinear control systems:A passive system approach[J].Systems&Control Letters,1995,25(1):41-52.
[8]YU Wen.Passive equivalence of chaos in Lorenz system[J].IEEE Transactions on Circuits and Systems(Ⅰ):Fundamental Theory and Applications,1999,46(7):876-878.
[9]BYRNES C I,ISIDORI A,WILL EMS J C.Passivity,feedback equivalence,and the global stabilization ofminimum phase nonlinear systems[J].IEEE Transactions on Automatic Control,1991,36(11):1228-1240.
[10]LI Y X,TANG W K S,CHEN G R.Generating hyperchaos via state feedback control[J].International Journal of Bifurcation and Chaos in Applied Sciences and Engineering,2005,15(10):3367-3375.
Adaptive Synchronization of Hyperchaotic Chen Systems via Passive Control
FU Gui-yuan,LI Zhong-shen
(College of Mechanical Engineering and Automation,Huaqiao University,Quanzhou 362021,China)
Under different initial conditions,a control method based on passive control is proposed to achieve the adaptive synchronization of two hyperchaotic systems with uncertain parameters.The system parameters are estimated by introducing adaptive control,and an adaptive passive controller is designed to transfer the synchronization erroneous equation into a passive system.In terms of the passivity theory,the dynamic erroneous equation can be stable on the original point of the state space,namely,the two hyperchaotic systems can be completely synchronized.The simulation results have proven the simplicity and effectiveness of the designed controller.
hyperchaotic Chen system;synchronization;passive control;adaptive control
TP 273
A
1000-5013(2010)04-0378-05
(责任编辑:黄仲一 英文审校:郑亚青)
2009-10-21
李钟慎(1971-),男,教授,主要从事最优控制、时滞系统的控制和抗饱和控制的研究.E-mail:lzscyw@hqu.edu.cn.
福建省自然科学基金计划资助项目(E0710018)