摆臂式喷涂机的研制
2010-08-24高云萌杨春青
李 慧,高云萌,杨春青
LI Hui, GAO Yun-meng, YANG Chun-qing
(北京机械工业自动化研究所,北京 100120)
0 引言
北京机械工业自动化研究所研制的摆臂式自动喷涂机是车箱自动喷涂系统重要设备之一,用以替代人工进行喷涂作业。主要用于卡车货箱底板、两边板内表面喷涂。适用于边板高度小于600mm的车箱。根据不同的车厢外形实时改变喷涂程序号,以满足不同车型的喷涂要求。本设备是为用户研制,是一种经济型的新机种,满足国内用户需求。
1 设计方案的确定
根据作业对象和工艺情况,采用两轴两个自由度,一个水平直线往复运动和一个垂直扇面往复摆动。每个轴均采用隔爆型防爆电机变频调速驱动。水平直线往复运动带动摆臂在零位和工作位之间运动。垂直扇面往复摆动为摆臂带动静电喷枪实现对卡车货箱底板、两边板内表面的喷涂。为了避让车厢前板护栏,防止摆臂和车厢前板护栏相撞,采用一组对射光电开关进行检测,确认车厢前板护栏走过之后,摆臂才能启动向工作位运行。喷涂时车厢后板必须成打开状态以免发生摆臂与车厢后板碰撞。
2 摆臂式喷涂机组成
摆臂式喷涂机主要由立柱、横向移动装置(Y轴)和摆动装置(A轴)组成。如图1所示。
2.1 立柱
立柱分为左、右立柱,作为摆臂式喷涂机的支撑。避让车厢前板护栏的一组对射光电开关分别安装在左、右立柱上。为了防止漆雾污染光电开关,对射光电开关放在一组保护装置中。

图1 摆臂式喷涂机结构图
2.2 横向移动装置
横向移动装置安装在横梁框架内。
一台交流隔爆电动机位于横梁右侧,经V型皮带驱动减速机,与减速机连接的链轮通过链条带动滑台,使之横向运动,工作行程为1000mm。
在横梁中间和右侧共设置4个接近开关,分别为:左限位,工作位,零点,右限位,它们是一种安全防护装置,可防止滑台在横向移动过程中,超出工作行程范围。在接近开关以外,装有机械限位挡块作为双重保护。
2.3 摆动装置
摆臂安装在滑台上,滑台上装有一台隔爆型防爆电机,电机驱动一个四连杆机构带动摆臂转动±40°,从而带动摆臂末端的静电喷枪对货厢进行喷涂。摆臂的长短可手动调节。在摆臂的驱动电机上装有接近开关及检测片,根据电机旋转时接近开关发出的脉冲信号数量确定静电喷枪的运行位置,由此确定开关枪点位置,实现静电喷枪的喷涂作业。
3 摆臂式喷涂机控制系统
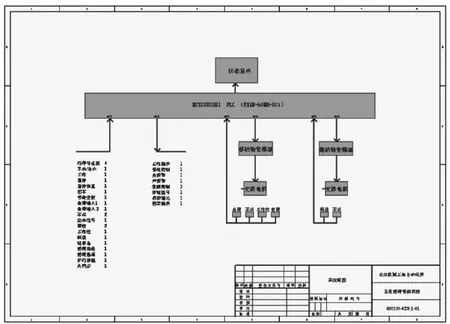
图2 喷涂机电控系统框图
控制系统包括可编程控制器、日本三菱公司变频器和一组电源组成。
顶喷机包含两个自由度:滑台移动(臂移动)和臂摆动,其运动是由变频器分时控制两台电机,电机上分别装有码盘,运动位置和速度均可以根据现场情况任意控制。系统可适应31种车型,具备自动输入程序号及手动输入程序号功能、自动零位恢复及喷枪位置检测及手动/自动控制喷枪/静电涡轮功能等。
3.1 工作流程

图3 系统操作面板
1)上电前,首先检查确定机械无故障,变频器参数设置正确,可编程控制器示教数据正确。
2)合上负荷开关,此时电源灯亮。打开钥匙开关,按下驱动上电。地链以一定的速度前移,如果低于链速下限,则系统暂停;调好链速后开始运行。如有急停,则系统停止工作,这时要断电,排除故障后再通电工作。
3.2 识别系统
当车厢经过启动光电开关时开始延时,超过设定延时时间,若摆臂没有回到零位,则系统报警,停链(两轴电机均处于停止状态,给出停链信号)。
4 编程示教
为节约用漆,本示教程序段可以通过写入对应的示教数据,使喷枪在离开车身时及时停止喷涂,固示教前需设置数据。
喷涂机在喷涂过程中是以一定速率往复摆动喷枪的,必须保证车身以一定的速率向前移动,这样才能使喷涂效果良好。所以示教人员要规定链速的下限,即一秒内地链移动的码值下限。如果运行时链速低于下限值,则系统报警,停止工作,发出停链信号,直到链速正常,系统才恢复正常工作。
对于不同型号的车厢,由于车身长度不同,所需喷枪往复摆动次数也不同,示教人员要测出各种车型所需喷枪往复摆动次数。
对于车厢的内侧面和底板,喷枪的喷涂轨迹如图4所示:
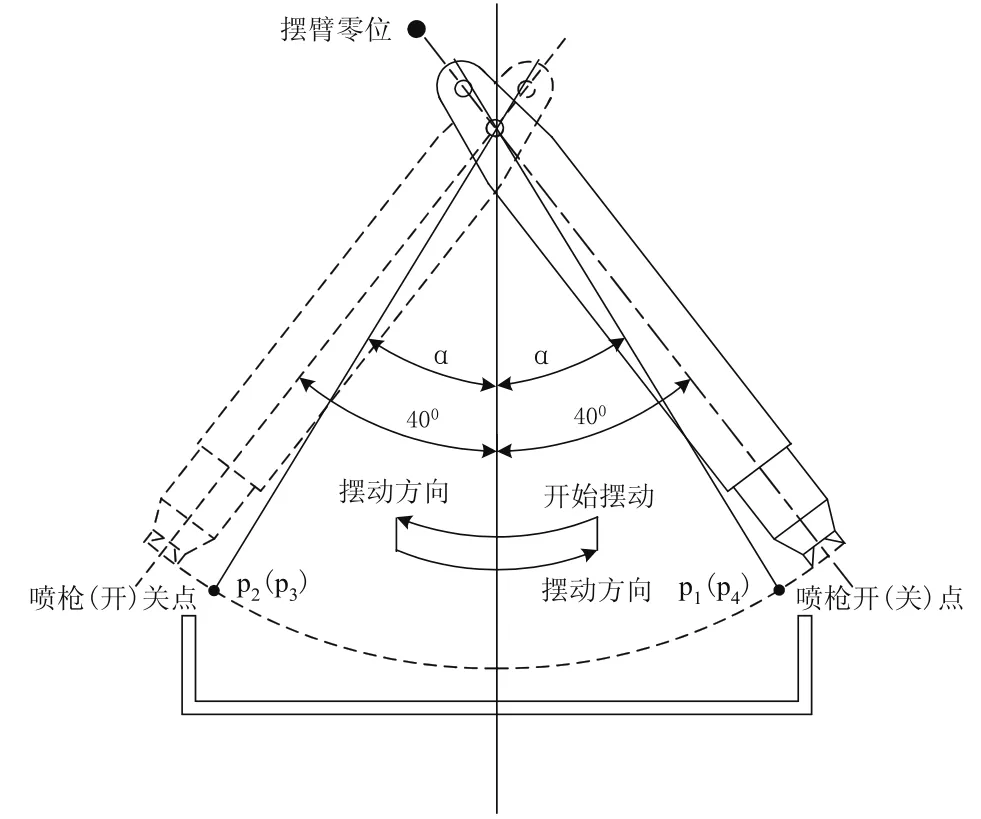
图4 摆臂示意图
喷枪开关点的码值决定喷枪的开关,示教人员必须预先计算出这四个码值。(喷枪的每个来或回都有一个开点和一个关点)。
5 关键技术及创新点
摆臂式喷涂机存在着一个危险性,既它的摆臂一定要等前面的车厢护栏走过后才可工作。我们采用了一组对射光电开关进行检测,确认车厢前板护栏走过之后摆臂才开始工作。
6 成果水平
本项目是自主开发研制,具有完全自主知识产权;国内首创,填补了国内空白。根据生产应用和实际喷涂车辆的测试,设备的技术性能完全达到合同要求。
