直动型弧面凸轮机械手的设计
2010-08-24丽ZHANGLI
张 丽ZHANG LI
(辽宁省机电工程学校 模具焊接教研室,辽阳 111004)
0 引言
近年来,自动机械手发展很快,纯机械的机械手,在可靠性,价格方面具有优越性。弧面凸轮机械手作为一种新型机械手,具有结构紧凑、可靠性好、成本低、精度高的特点,在现代生产上仍具有十分重要的地位。
1 方案的拟定与比较
1.1 设计要求
1.1.1 主要参数,如表1所示
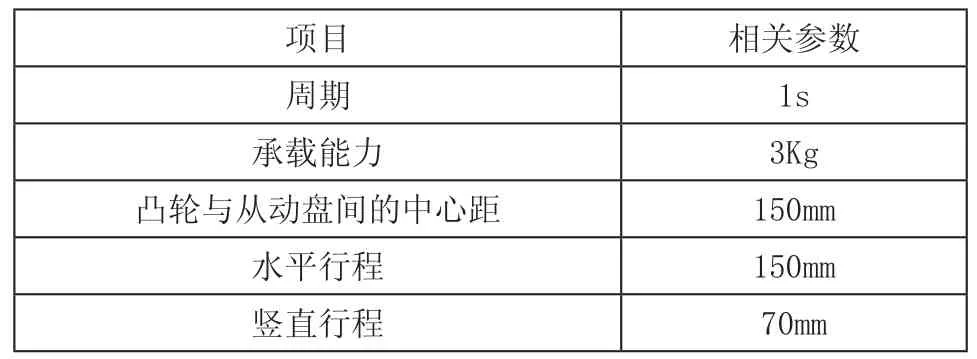
表1 主要参数
1.1.2 运动循环要求
此机械手用于冲模送料中,其输出轴的运动轨迹。
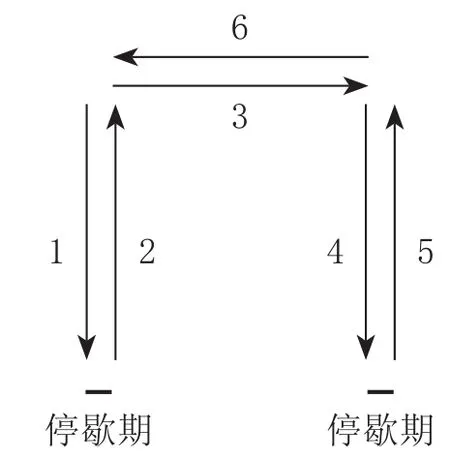
图1 运动循环图
1、2、4、5是升降运动,其高度就是机械手的竖直行程。3、6为水平运动。机械手在升降凸轮控制下向下运动接近工件,到位后在短暂的停歇期靠手爪抓取工件。手臂向上运动到一定位置,升降运动停止。手臂在水平凸轮控制下作水平运动。待运动到位后,由升降凸轮控制到达所需位置后,手爪放下工件,回升。最后在水平凸轮的控制下回到初始位置,完成一个工作循环。
凸轮机械手的实际运动轨迹是由水平和升降两种直线运动组合而成的,分别靠相应的凸轮来控制实现,要求两个凸轮的运动有良好的配合。
1.2 方案拟定
确定方案:
采用两个弧面凸轮,从动盘上有两个轴线沿转盘径向分布的滚子,跨在凸轮圆环面的突脊上。靠轮廓面推动从动盘摆动,从而实现输出手臂的水平竖直运动。可见右边的示意图:图2所示。方案结构简单,采用空间凸轮,设计、加工复杂,在数控机床上可加工出高精度的空间凸轮。
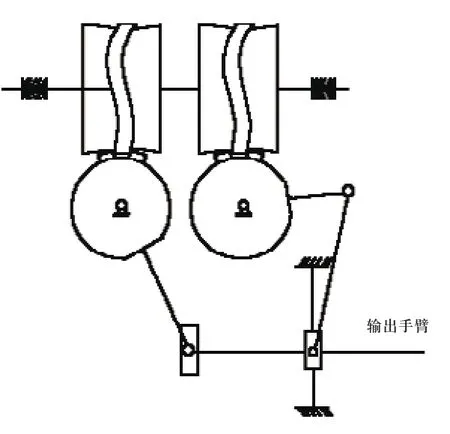
图2 示意图
2 主要运动参数和几何尺寸的确定
2.1 凸轮升程角及停歇角分布
本设计根据要求机械手每分钟的工作循环60次,工作循环时间即周期Tp=1s。
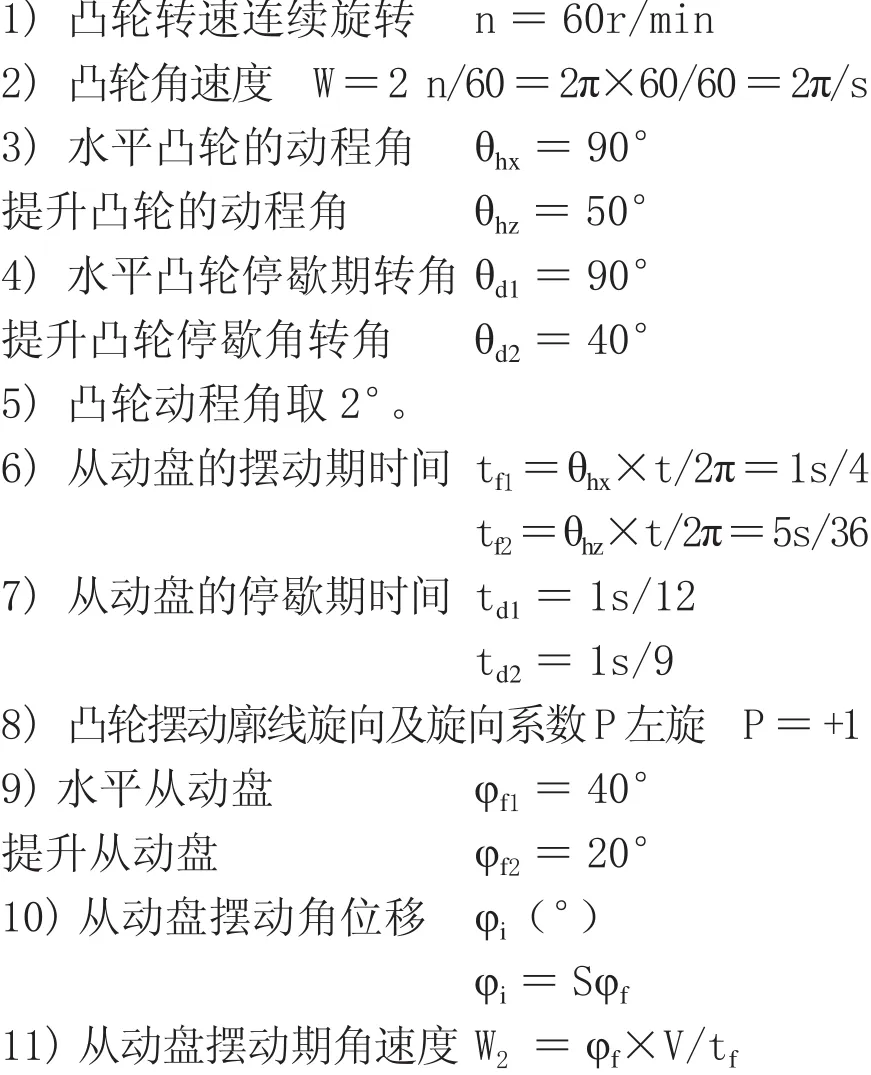
由于凸轮机械手运动曲线由两组独立的弧面凸轮经一定的机构变换组合而成。经分解后,可知其有以下几个时间段组成。如图3所示。

图3 工作循环图
2.2 主要运动参数
3 主要零件的设计与计算
3.1 杆长计算
由图4可看出杆1长度为│BD│的长度
│BD│=75/sin20°-(60-10)=169.28mm
│OC│=75/tan20°=206.06mm
则滑槽的理论长度为│CE│
│CE│=│OB│-│OC│
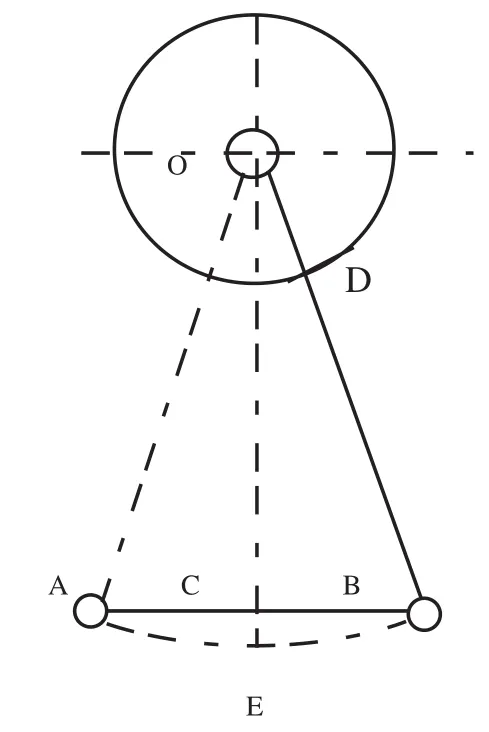
图4 计算杆1的长度
= 75/sin20°- 75/tan20°
=13.22mm
考虑到竖直行程为70mm,则滑槽的实际长度为:
1个竖直行程+滑槽的理论长度+滚子半径+余量
3.1.2 计算杆2的长度经推算杆2长为 151.56mm
3.2 滚子的设计
滚子的要求较高,要有准确的定位,摩擦小、转动灵活、便于润滑。要用一种专用轴承NAKD35型轴承。
3.3 水平从动盘设计
此机构上应设有两个安装滚子的孔,由于滚子直接和凸轮接触,所以这两个安装孔的要求较高,特别是垂直度、粗糙度及孔中心线间的夹角等都有严格的要求.为了安装和拆卸的要求,不影响其强度,且便于安装,可在其下部再钻一小孔。滚子与从动盘间的配合为H7/s6,过盈配合。在A向处要安装连杆1,为保证足够强度,采用四个M6×20的内六角螺钉。提升从动盘的结构与形式与此大致一致。
4 直动型凸轮式机械手系列设计LPP200
4.1 方案确定
根据工艺要求等条件,确定其结构如图5-1所示。该机构由两个凸轮机构组成。一个推动输出端W作X方向的水平运动;另一个使W作Z方向的垂直运动。从动件中的三个滑动副可以保证X、Z两个方向的运动互相独立。两个从动系统可以把行程放大
根据生产条件给定:
行程:X 方向HX=200mm
Z 方向HZ=70mm
设计速度:ω=2Πs-1(即凸轮所在轴——输入轴的转速60/min)
4.2 基本参数计算
4.2.1 主要距离计算
根据给定的条件可计算出主要距离,如表2所示:

表2 主要距离计算
4.2.2 动程角的确定
在一个运动循环中水平X方向要完成两个行程,竖直Z方向要完成四个行程。设B、D抓放动作都需要相当于凸轮转角30°的时间(即30/360=1/12秒)因此,应在300°凸轮转角内完成上述六个行程。若设X、Z方向运动完成一个行程的时间分别是thx、thz,相应的凸轮动程角θhx、θhz,设两个方向取相同的运动规律,而且实际加速度也相等。
为了两个凸轮的动程角,改善其受力状况,可让X、Z向的运动有一段时间内同时进行,采用倒“U”型的运动轨迹。
θhx= 80° θhz= 60°
4.3 结构设计
自动机械中的凸轮机构结构设计应满足工艺要求,能实现预定的运动,能承受工作中连续载荷的作用,尺寸紧凑而符合整机的安装要求,易于加工与装配,而且成本低、寿命长。为了保证凸轮的形位约束,X向凸轮可采用一组共扼盘形凸轮,为提高装配的精度,减少端面的跳动,可将它们装在同一个凸轮座上。Z向凸轮则可做成槽凸轮。作为自动机械的从动件,可分为直动杆和摆杆。从动件除受拉、压应力外,还常常受到弯矩作用,应此必须具有足够的抗压和抗弯刚度。
先将装配图草图绘制如下,并表出主要部件与附件,以便对设计有一总体的认识和了解。
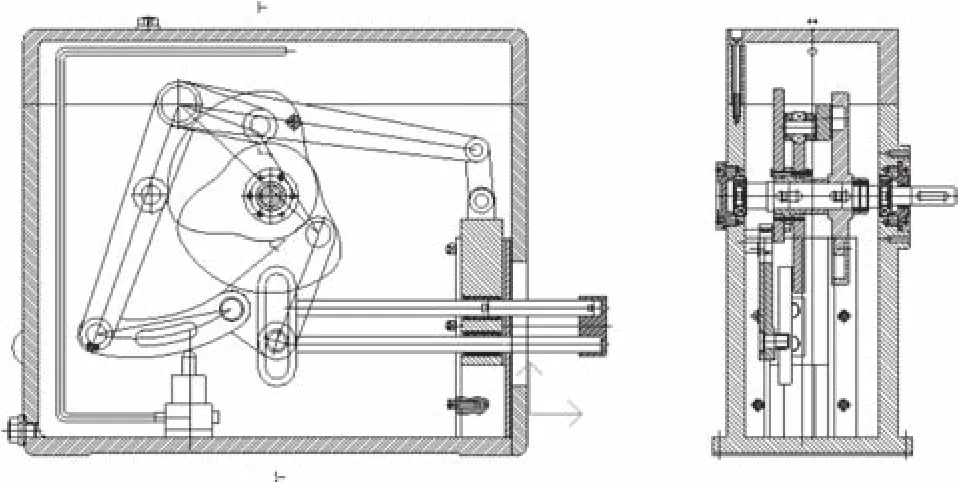
图5 装配图
5 结束语
间歇传动是自动机械和半自动机械中常见的机械传动方式之一,其作用是使设备中某些构件产生周期性的运动和停歇。对于弧面凸轮间歇摆动驱动装置,国内未见到有此类型的机构出现。所以本设计具有一定的挑战性及现实意义。
[1] 张波,等.多功能上下料用机械手液压系统[J].液压与气动,2002.
[2] 朱春波,等.气动上下料机械手[J].液压气动与密封,1999.
[3] 周伯英.工业机器人设计[M].北京:机械工业出版社,1995.
[4] 蔡自兴.机器人学[M].北京:清华大学出版社,2000.
[5] 王天然.机器人[M].北京:化学工业出版社,2002.
[6] 王承义.机械手及其应用[M].北京:机械工业出版社.1981.
[7] 机械设计手册(第1-5卷).
[8] 天津大学.工业机械手设计基础[M].天津人民出版社.1980.
