基于智能小车的模糊寻迹控制
2010-08-23冯华勇
冯华勇
FENG Hua-yong
( 四川工程职业技术学院,德阳 618000 )
0 前言
随着科技的进步,智能小车作为一种新型的科技产品,在军事、民用中已经发挥着越来越重要的功能。而对于智能小车轨迹的控制则成为了判断小车智能化程度高低的一个重要标准。本文就小车在黑白分明的曲线车道上行驶采用了模糊控制的方法。经过实践证明,小车保持了较高的速度与准确度在此车道上行驶。
1 行驶策略分析
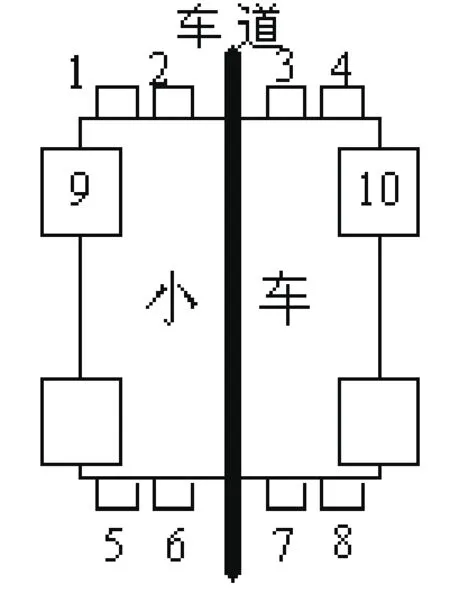
图1 正常行驶
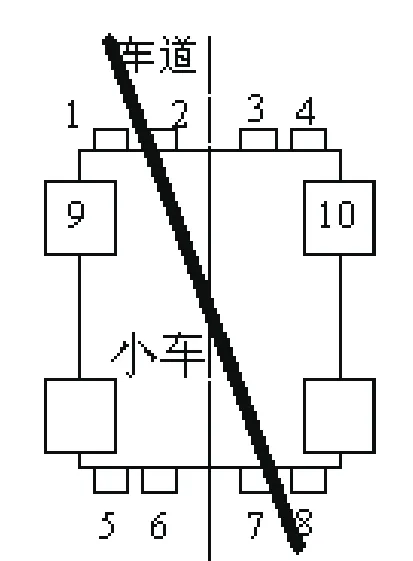
图2 逆向行驶
如图1所示,智能小车在白色广场上沿黑色车道行驶,图中(1~8)表示反射式光电传感器RPR220,通过检测道路颜色的不同产生不同的反射系数从而得到强弱信号,根据(1~8)号产生的高低电平信号可以得知小车偏离轨迹的程度,经控制器判定计算后调整直流电机9、10的运行状态让车道回到2、3之间,6、7之间正向行驶。其中2、3之间的宽度大于3倍黑线的宽度,其余相邻两个光电传感器距离小于黑线宽度。当两个相邻传感器检测到电平信号的变化时按前一单一电平状态变化计算。例如:图2所示当车道位于接收管2、7上方时检测到电平的变化,小车与车道按逆时针方向偏移了一个夹角。此时按行驶经验需要电机9、10反转倒车让车道回归到2、3之间。如果下一时刻传感器7、8均检测到信号变化按7的状态变化计算。建立表1、表2如下:
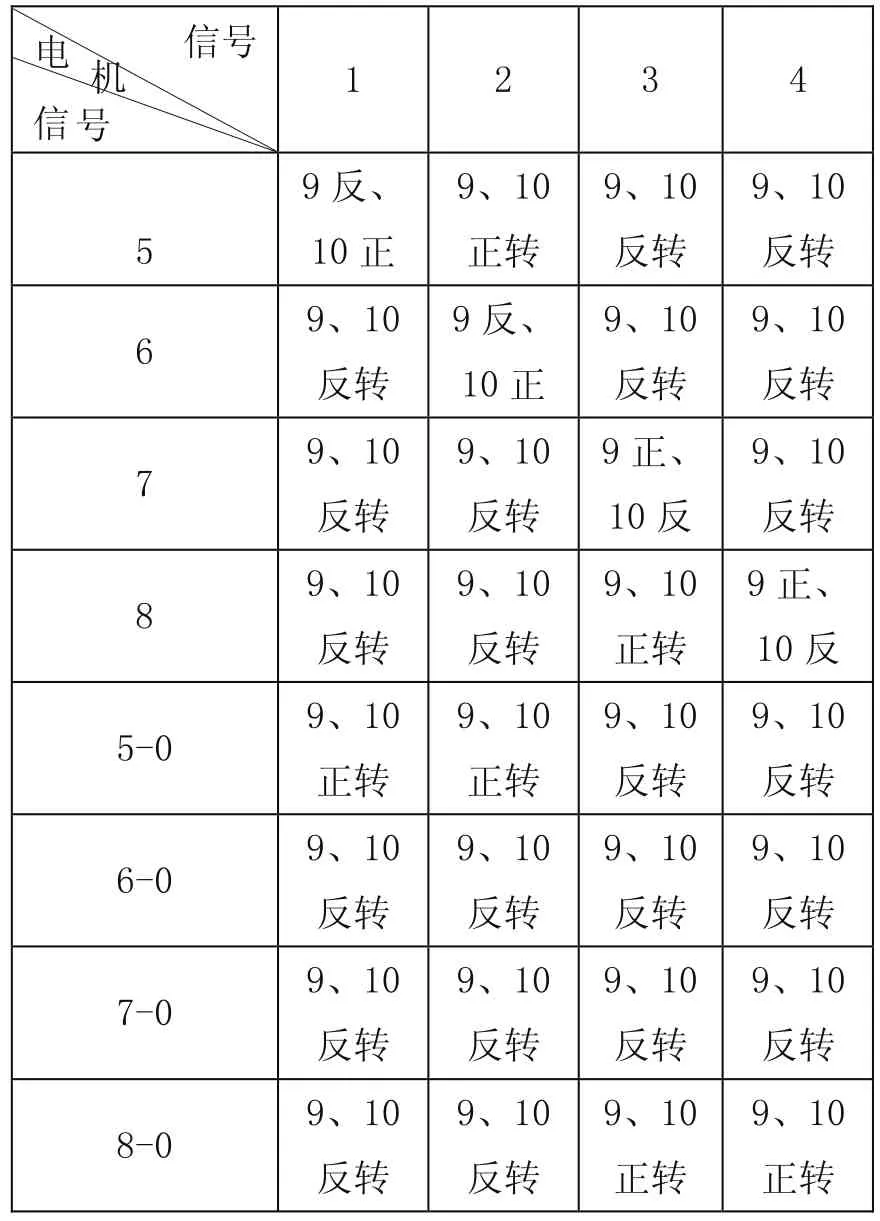
表1 电机状态
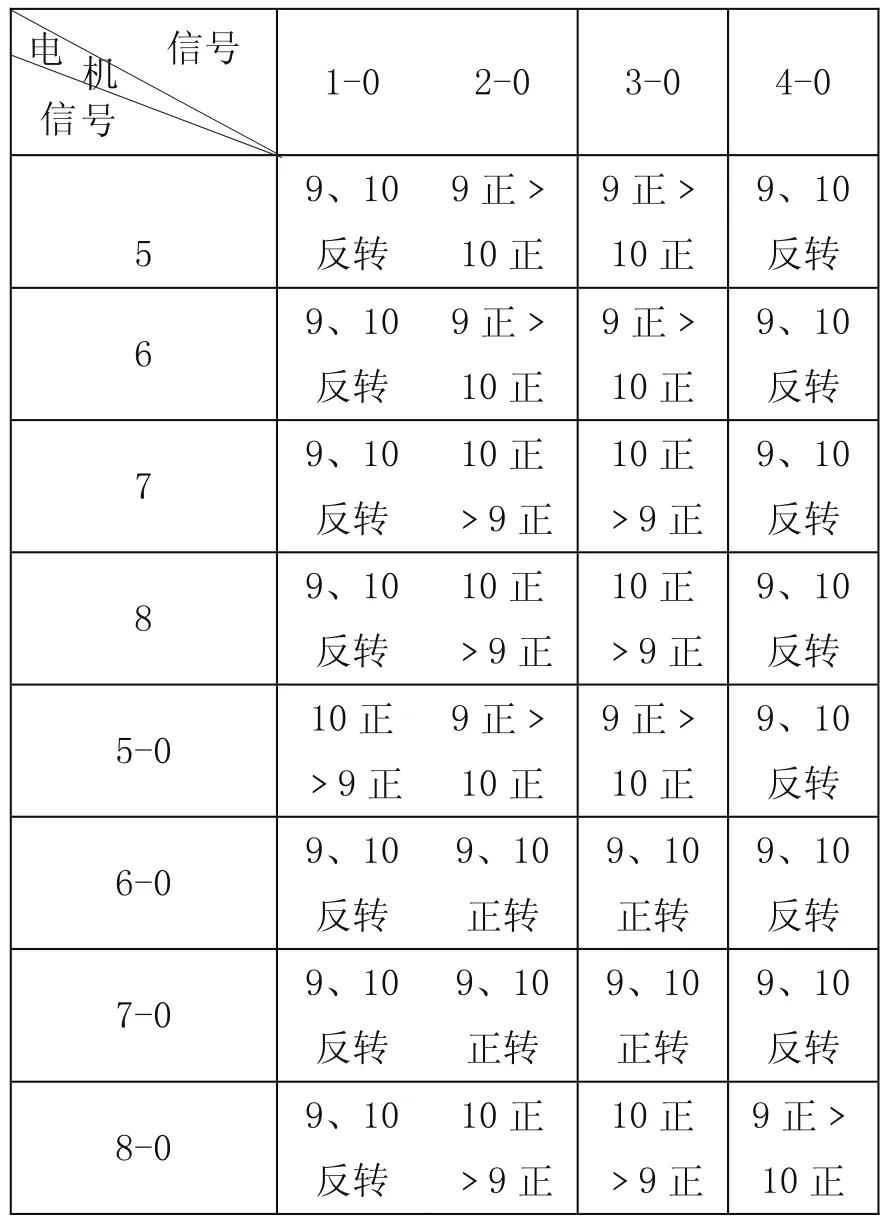
表2 电机状态
上表中1~8表示传感器检测到道路黑线位置,*—0表示检测到的信号从前*的高电平状态变为低电平状态(*表示1~8)。
2 控制系统设计
按行驶策略分析可知,该控制系统主要解决信号检测以及电机正反转速度控制问题,考虑到控制的准确度以及效率的问题,本文采用TMS320LF2407控制芯片与专家模糊控制系统相结合的控制方案。如图3所示,在小车前后端底部安装8个光电传感器,反射接收信号后进行电平高低处理,将高低电平送入DSP芯片TMS320LF2407进行专家模糊算法处理,清晰化后控制9、10号直流电机的PWM脉宽的占空比实现快速正反转。键盘进行启动、停止控制,LED显示行驶的时间。
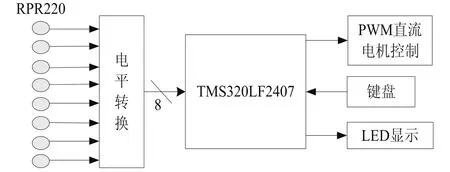
图3 系统设计
3 专家模糊控制
为了保证小车迅速、准确的响应,依据行驶策略分析和系统控制方案设计,采用图4的专家模糊控制器,此模糊控制器采用二维变量控制方式,由表1、表2建立专家数据,根据黑色车道偏离小车正中位置作为偏差E,dE/dt作为EC,可将E、EC程度均分为{负大、负小、零、正小、正大}即{NB、NS、ZE、PS、PB},此时E由于光电传感器安装位置固定,得到电平信号离散可预测,所以仅设定模糊论域即可,设定为(-3,+3),此时-3表示车道偏出光电管1位置,-2、-1、1、2分别表示车道位于光电管1、2、3、4的位置,0表示车道位于小车正中位置,3表示光电管偏出光电管4的位置。PWM占空比的控制量的变化U模糊论域设定为(-3,+3)进行正反转控制,比例因子为1。
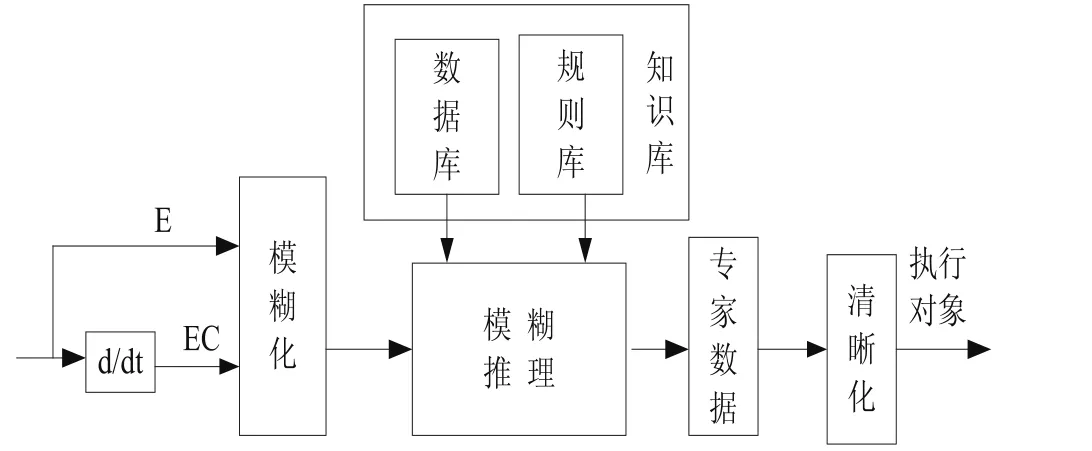
图4 模糊控制器
根据模糊控制器的设计原理进行模糊推理清晰化处理。由实践过程得到的经验各模糊子集隶属度如下表3、表4所示。
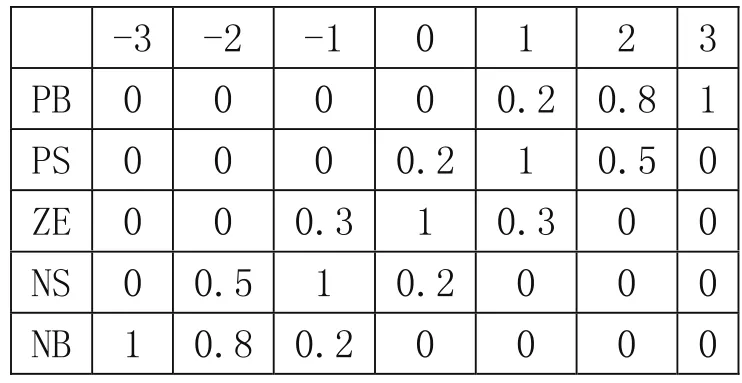
表3 模糊子集隶属度(E、EC)
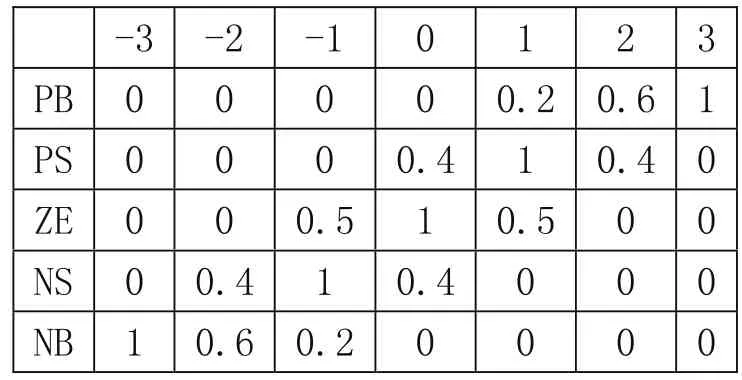
表4 模糊子集隶属度(U)
由实际经验建立如下对称规则表5:
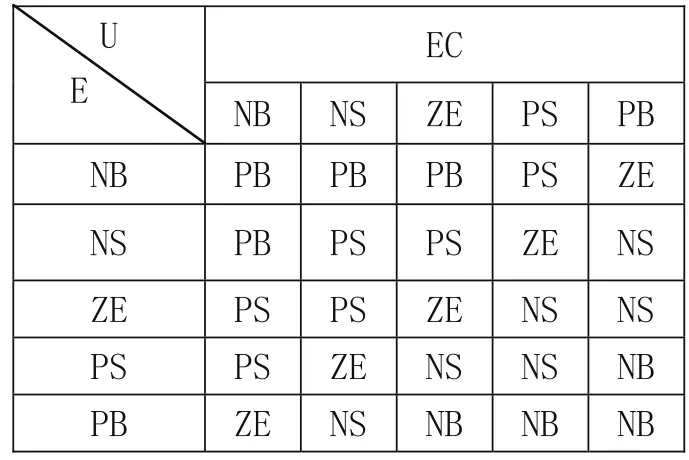
表5 模糊控制规则
由模糊规则表可以得到I F E=AiA N D EC=BjTHEN U=Cij,其中Ai和Bj表示输入的第i和第j个模糊子集,Cij表示结论对应的模糊子集。采用最大-最小(max-min)推理法求解,再使用加权平均法求解查询表的精确量k:

其中ki为加权系数,u(i)为隶属度,获得模糊控制表6如下:
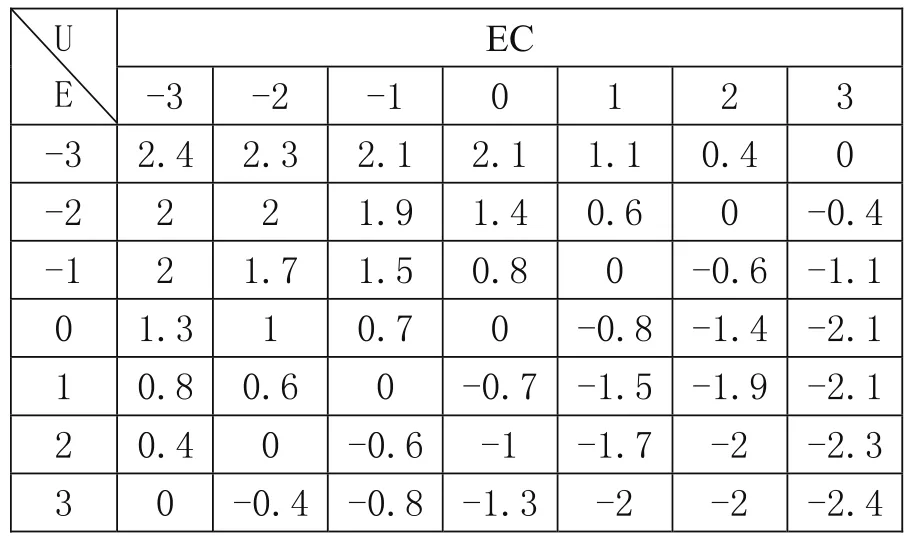
表6 模糊控制
当DSP芯片定时采集到由光电传感器引起的电平信号的变化后,按光电传感器序号进行模糊化处理查表,找到模糊控制表相应输出,依据经验规则表1、表2的电机正反转状态改变PWM的占空比控制直流电机的快速旋转。
4 程序流程
如图5程序流程图所示,该智能小车初始状态位于车道的正中位置,通过按键控制判断是否准备好,同时定时采集光电管的电平信号进行数据处理。当检测到按键按下,表示准备工作就绪,小车准备出发,将定时采集到的数据进行模糊化处理,清晰化输出,改变电机的运动状态,PWM的占空比,保证小车按黑色车道准确、快速地行使,同时将行使的时间及时显示出来。
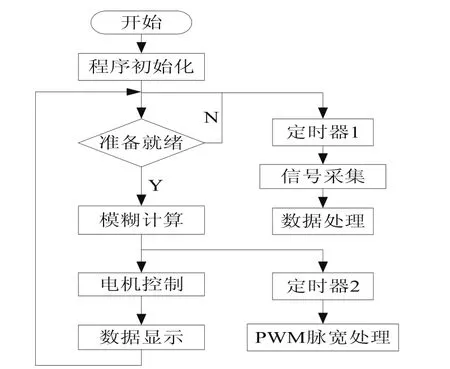
图5 程序流程图
5 结论
如下图6所示,小车沿圆形车道运行,经模糊系统控制其运动,实际运动轨迹如图虚线所示,偏离小,速度快,可以达到3m/min。实践证明此控制模式是一种理想的控制模式。

图6 小车运动轨迹
[1]谭永宏,张辉.智能寻迹小车的研究与设计[J].微计算机信息,2008,(24):3-2.
[2]温阳东,程柏林,刘艳丽,贾贤龙.智能小车路径跟踪的研究与实现[J].仪器仪表用户,2008,15,1.
[3]程宇,程磊,黄卫华,孙浩.基于模糊控制的智能车调速系统的设计[J].武汉科技大学学报(自然科学版),2007,8,(30):4.
[4]姜志玲.简易智能电动车的设计[J].华东交通大学学报.2005,8,22,4.
[5]闻新,周露,李东江,贝超.MATLAB模糊逻辑工具箱的分析与应用[M].北京:科学出版社,2001.
[6]Cai Zhixing and Tang S X.Controllability and robustness of T-fuzzy system under directional disturbance.fuzzy sets and systems,2000.279-285
[7]Lee C.Fuzzy logic in control system:Fuzzy logic controller,part I and II.IEEE Trans.On SMC,1990.404-435.
