基于数据驱动的电动执行器故障诊断方法
2010-08-23岳有军王红君
岳有军,王红君,宗 群
YUE You-jun1,2, WANG Hong-jun2, ZONG Qun1
(1. 天津大学 电气自动化学院;天津 300072;2. 天津理工大学 天津市复杂系统控制理论及应用重点实验室,天津 300384)
0 引言
电动执行器广泛应用于石油化工、电厂、水泥等各类流程工业自动化系统中,是整个自动化系统中必备且重要的终端执行仪表,通过调节介质流量来控制工艺参数,对控制系统调节品质的优劣、安全平稳运行具有很大的影响。由于执行器安装在生产现场,在高温、高压/高压差、振动、腐蚀性等恶劣的环境下工作,导致执行器各部件会出现故障,这可能会导致安全、生产事故,所以执行器设备故障在线诊断对整个自动化控制系统的可靠性非常重要,因此各种电动执行器的故障诊断方法相继提出,主要有基于解析模型[1-3]、基于人工智能[4-8]以及针对某类故障研究专用的诊断故障电路[9]。本文以锅炉过热蒸汽温度控制系统为应用背景,提出了一种基于数据驱动的新电动执行器故障诊断方法。基于数据驱动的故障诊断方法基于数据驱动的方法主要有主元分析PCA( Principal Component Analysis)、部分最小二乘法PLS ( Partial Least Squares) 、Fisher判别式分析FDA( Fisher Discriminant Analysis)等,它们主要的特点是可以完全依赖于数据来实现故障检测和诊断,是直接利用过程数据的一种过程监控方法, 该方法可实现高维监控数据进行降维处理,并从中获取重要的故障特征信息,以提高故障诊断算法的效率。
1 电动执行器常见故障类型
电动执行器的稳态数学模型[4]如图1中直线a所示,其表达式为

式中:x 为执行器的输入;y 为执行器的反馈输出;α和β分别为执行器的增益系数和零点误差。α和β是在不同执行器故障状态下的值不同,图1中直线a(α=1,β=0)表示执行器工作正常。直线b (α≠1 )是恒增益故障,是电动执行器的一个常见故障,其中当α=0时就是发生卡死故障,表现为反馈信号很长时间不发生变化。直线c是恒偏差故障,是死区超出正常值并且输入和输出总是相差固定的值。此外,死区故障也是一种常见故障,表现为死区过大或过小。如果死区太大则电动执行器输出不能很好地跟踪输入,而死区太小会使电动执行器整机产生自激振荡而无法正常工作。

2 基于主成分分析的故障特征提取
汽包锅炉过热蒸汽温度控制系统仿真模型[10]如图2所示,系统为串级控制系统,主调节器采用PID控制、副调节器采用P控制,导前区传递函数为,惰性区传递函数为燃烧率扰动,假定为减温水自发扰动。为了使故障诊断算法对实际的生产具有参考价值,严格按照某型号电动执行器正常运行及故障检修时测得参数建立电动执行器动态模型,在多种工况下进行仿真,以1S为采样周期,得到图中系统各环节动态响应及稳态性能样本数据104例。采用主成分分析法[11],对样本数据进行处理,主成分分析计算步骤如下:

图2 锅炉过热蒸汽温度控制仿真系统
1)原始数据进行标准化处理。为消除变量之间在数量级或量纲上的不同,需要把原始数据标准化处理,系统状态数据矩阵中每一元素的xij的标准化值为:

本文经计算执行器输入信号、执行器输出信号、内回路输出信号、外回路输出信号等4个累计贡献率为88.9%,因此选择上述信号作为电动执行器故障特征信号。
3 基于支持向量机的电动执行器故障诊断模型
3.1 二分类支持向量机算法
3.1.1 支持向量机
支持向量机是一种研究有限样本情况下建立分类器及机器学习规律的通用学习方法。建立在统计学习理论和结构风险最小化原理的基础上,通过保持经验风险值固定并最小化置信范围来实现结构风险最小化,比传统的基于经验风险最小化原理的方法(如神经网络)有明显的优点[12]。若给定的两类数据样本集为:

对于线性可分问题,求最优分类线可以表示为下面的二次规划问题:


式中m表示求和实际上只对支持向量进行。b*是分类阈值。
3.1.2 非线性支持向量机[13]
非线性支持向量机用于非线性分类,它首先使用一个非线性映射Φ把数据样本从原空间Rd映射到一个高维特征空间Ω,再在高维特征空间Ω求最优分类面。如果在最优分类面中采用适当的内积函数就可以实现某一非线性变换后的线性分类,而计算复杂度却没有增加,此时得到的最优分类函数是:

选择不同的内积核函数形成不同的算法,目前在分类方面研究较多也较常用的核函数有四种,即线性核函数、多项式核函数、径向基核函数和Sigmoid核函数。
3.2 多类分类算法
采用支持向量机解决故障诊断等多类分类问题时,通常需要组合多个二值SVM分类器来构造多类SVM分类器。典型的构造多类SVM分类器的方法主要有1对n算法、1对1算法[14,15]。
1)一对一的多分类算法
在k类样本中构造所有可能的两类分类器,每个两类分类器只用k类中的2类训练样本进行训练,这样可以共构造出k(k-1)/2个两类分类器。采用“投票法”对测试数据样本分类。对每个测试样本,所有k(k-1)/2个两类分类器对该样本分类后,k类中的哪一类得票最多,就判定测试样本属于哪一类。
2)一对多的多分类算法
一对多的多分类算法需要构造k个两类分类器。在构造k个分类器中的第m个分类器时,将第m类的训练样本作为一类,将除去m类之外的其余所有类别的训练样本作为一类,采用“比较法”对测试数据样本分类。将每个测试样本分别输入给k个两类分类器,从分类输出函数式可得k个输出结果,求出k个输出结果中最大者,其分类器的序号即为测试样本所属的类别号。
4 电动执行器多故障诊断模型的建立及应用
考虑到汽包锅炉过热蒸汽温度控制系统的特点,选用非线性支持向量机。由于电动执行器故障类型较少,采用一对多的多分类算法构造多故障分类器,依据文献[14]的研究选取径向基函数作为SVM的核函数。从已采用主成分分析法进行降维处理后的104个样本中选取不同工况不同故障下的80个样本作为的训练样本,剩余24个样本为测试样本,经过训练得到4个一对多的多类SVM模型,用测试样本进行测试,训练及测试结果如表1所示。
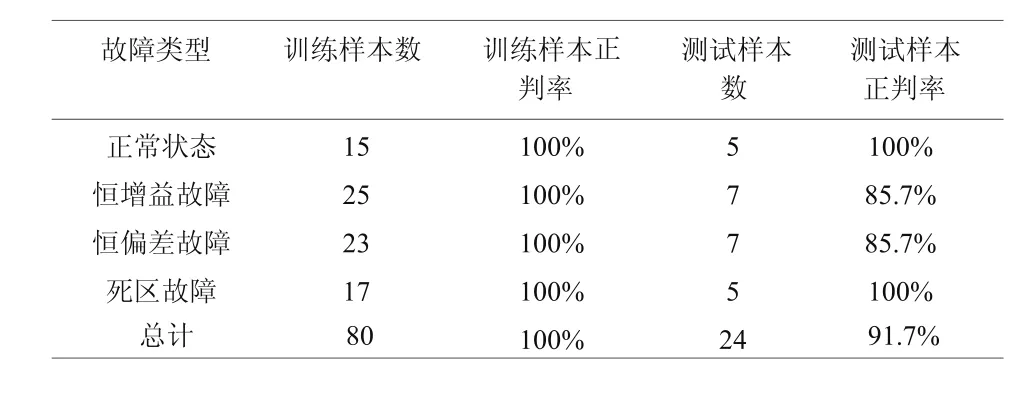
表1 电动执行器多故障分类器应用实例
训练样本和测试样本的分类正确率都保持在一个较高的水平,说明多类SVM模型在小学习样本条件下对电动执行器故障模式识别能力强、效率高,具有很强的推广性。
5 结论
本文在采用主成分分析方法选取电动执行器故障特征的基础上,建立了基于支持向量机的电动执行器多故障诊断模型。应用多故障诊断模型对电动执行器正常工作状态、恒增益故障状态、恒偏差故障状态,死区故障状态等4种数据样本进行诊断,取得了比较满意的效果。而基于支持向量机的电动执行器故障诊断模型需要获取电动执行器所在系统的设备级、系统级的历史信息、当前状态信息,目前在大量使用电动执行机构的各类流程工业控制系统中广泛使用各种FCS、DCS系统,可以实现诊断模型所要求信息的采集、保存,因此为电动执行器的故障诊断多类SVM模型在其它流程工业应用背景下应用提供了保证。
[1]Shang,Qun-Li;Sun,Li;Wu,Hai-Yan.Model-based actuator f ault diagnosis[J],Zhejiang Daxue Xuebao(Gongxue Ban),2007,4(10):1660-1663.
[2]Tudoroiu,N.;Zaheeruddin,M.Fault detection and diagnosis of valve actuators in HVAC systems,2005 IEEE International Conference on Control Applications[C],2005.
[3]Tudoroiu,N.;Zaheeruddin,M..Fault detection and diagnosis of valve actuators in discharge air temperature (DAT)systems,using interactive Unscented Kalman Filter estimation [c].IEEE International Symposium on Industrial Electronics,2006,4:2665-2670.
[4]Patan K.Fault detection of the actuators using neural netwo rks[C],Proceedings of the 7th IEEE International Conference on Methods and Models in Automation and Robotics,Porland,2001.
[5]Witczak,Marcin;Korbicz,Jozef;Mrugalski,Marcin;Patton,R on J.A GMDH neural network-based approach to robust fault diagnosis:Application to the DAMADICS benchmark problem[J],Control Engineering Practice,2006,14(6),671-683.
[6]Witczak,Marcin.Advances in model-based fault diagnosis with evolutionary algorithms and neural networks,International Journal of Applied Mathematics and Computer Science,2006,16(1):85-99.
[7]Uppal,Faisel J.;Patton,Ron J.Neuro-fuzzy uncertainty de-co upling:A multiple-model paradigm for fault detection and isolation,International Journal of Adaptive Control and Signal Processing,2005,2:1055-1060.
[8]Feng Lv;Hai-Lian Du;Jun-Hua Yang;Zhan-Feng Wang.The Electric Actuator's Fault Diagnosis Based on Information Fusion[c],2007 International Conference on Machine Learning and Cybernetics,2007:1055-1060.
[9]马平,张 建,王英敏.一种诊断电动执行器恒增益故障的新方法[J],电网技术,2008,32(1):97-100.
[10]袁春晓.先进控制技术在电厂过热汽温控制中的应用研究[D],浙江大学.2005.
[11]吴景社,康绍忠,王景雷.基于主成分分析和模糊聚类方法的全国节水灌溉分区研究[J ].农业工程学报,2004,20 (4):64- 68.
[12]Vapnik V N.The Nature of Statistical Learning Theory[M],New York:Springer-Verlag,1995.
[13]NELLO CRISTIANINI,JOHNN SHAWE TAYLOR.An Intrduction to Support Vector Machines and other kernel based learnig methods[M]China Machine Press,2005.7.
[14]Hsu Chih-Wei,Liu Chih-Jen.A Comparison of Methods for Multiclass Support Vector Machines[J], IEEE Transactions on Neural Networks,13(2):415-425,2002.
[15]Kaibo Duan,Keerthi S S.Which is the Best Multi-class SVM Method?An Empirical Study[A],Multiple Classifier Systems,6th International Work-shop,Seaside,CA,USA:MCS 2005.
