基于电路仿真的BP神经网络故障诊断技术研究*
2010-08-11刘剑超
杨 健 冯 楠 刘剑超 李 静
(海军航空工程学院研究生管理大队1) 烟台 264001)(山东师范大学信息科学与工程学院2) 济南 250014)
1 引言
末制导雷达是某型导弹武器系统的重要设备之一,用于导弹在飞行末段对目标舰艇进行自动搜索、捕捉、跟踪和形成导引指令,以引导导弹精确地击中目标。导弹能否直接命中目标,末制导雷达起着十分关键的作用[1]。因此当其不能正常工作或指标超出正常范围时,要对其进行测试,并根据测试结果进行故障隔离与故障定位。本文以接收组合中的和路视频放大器电路为例进行分析。
2 电路分析
和路视频放大器电路如图1所示。

图1 和路视频放大器电路图
2.1 电路描述
该和路视频放大器电路共有12个电阻、6个电容、5个晶体管、1种电源 +30V,1路视频 ,3路输出分别送至回波检查、AGC电路和抗干扰电路,9个测试节点和1种电源。由于无源元器件如电阻、电容的可靠性较高,发生故障的概率较小,因此假设和路视频放大器电路中电阻、电容均无故障,只有5个晶体管出现故障。
2.2 输入激励及测试点设定
视频输入节点上允许施加两种激励信号,分别为U1和U2。U1为+4V直流电压,U2为幅值2.7V,周期 500μ s的正极性脉冲信号源。这里只就U1的情况进行讨论。
该放大器中的元器件种类较多,但无源元器件如电阻、电容的可靠性较高,发生故障的概率较小,而晶体管发生故障的概率较大,是关键器件。因此,将测试点主要设于图中五个晶体管的引脚处,具体设置如图1所示。
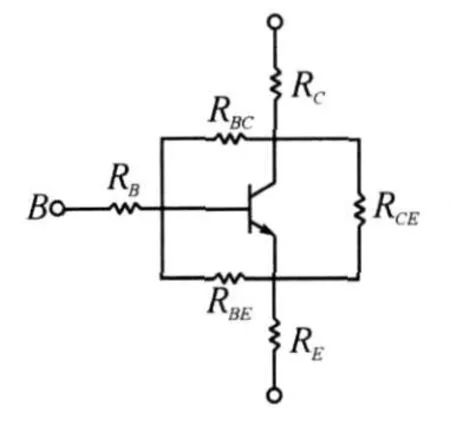
图2 晶体管近似故障模型
2.3 故障模型
在电路仿真的过程中,对使用最多的双极型晶体管的近似故障模型进行研究,使用一种基于晶体管正常模型—GP模型为故障近似模型[2]。为使用软件进行故障模拟,下面给出晶体管的故障模型,见表1。其中故障引脚电阻RC,RB,RE为晶体管各引脚与电路相应节点间的串联电阻;故障结电阻RBC,RBE,RCE。分别为并联于晶体管某两引脚之间的电阻,用于模拟晶体管PN结的短路和击穿。
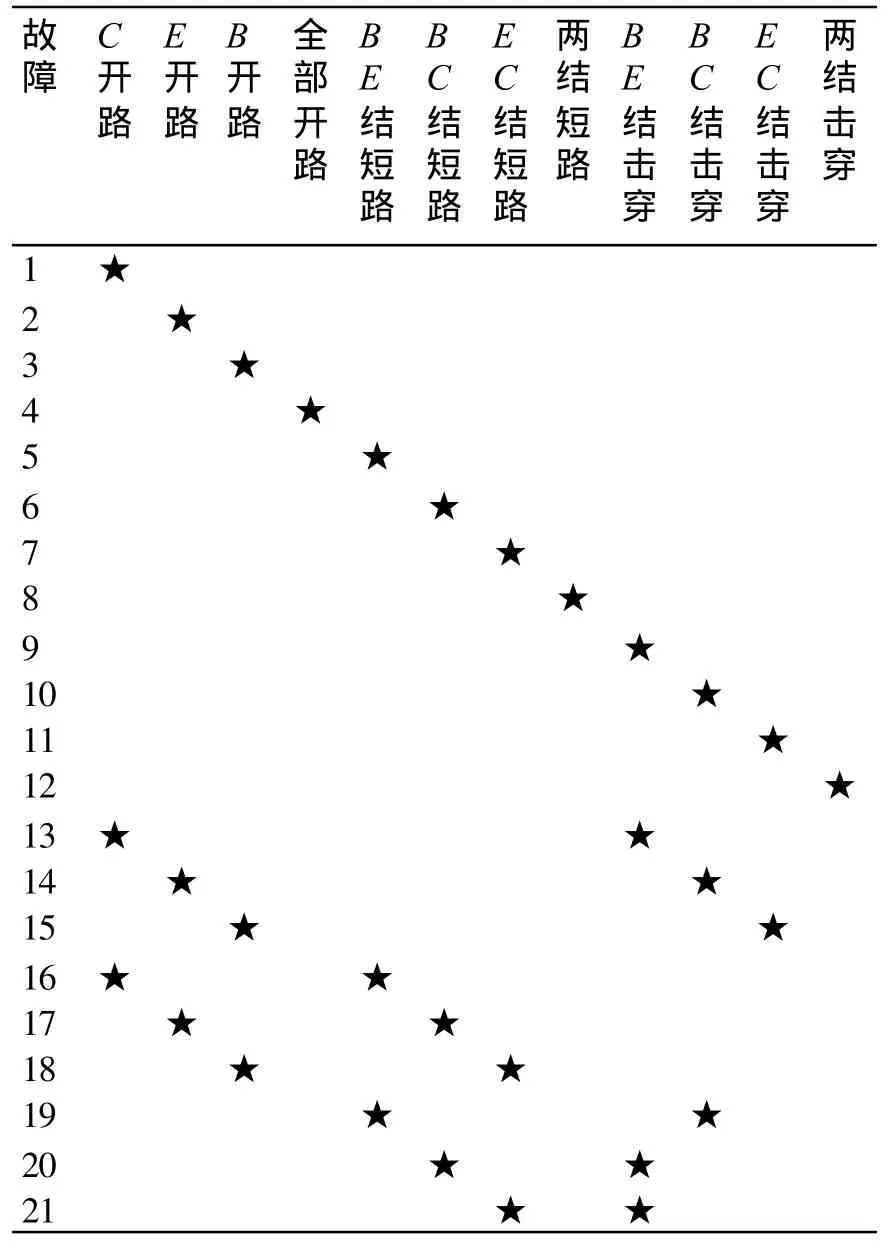
表1 晶体管故障表
正常情况下,故障引脚电阻RC,RB,RE阻值近似为零;故障结电阻RBC,RBE,RCE阻值为无穷大。仿真时,按如下方法设置电阻阻值:
1)某引脚开路,对应的故障引脚电阻阻值设置为无穷大,文中设置为10000Ω。
2)某两引脚短路,对应的故障结电阻阻值设置为0Ω(此处为理想值)。
3)某两引脚击穿时,对应的故障结电阻阻值设置为700Ω(PN结击穿后电阻阻值一般在500~1500Ω之间)。
3 电路仿真[2]
3.1 故障定义
图1电路中与晶体管相关的共有106种故障(包括正常状态F0),由于篇幅有限,列举部分故障于表2中。表中V代表晶体管,s代表短路,o代表开路,d代表击穿,b代表基极,e代表发射极,c代表集电极。

表2 电路部分故障定义
3.2 电路仿真
某型末制导雷达接收组合中的和路视频放大器在用软件Multisim仿真时施加激励U1的界面图如图3所示。
由表1可知本电路共有106种情况,即1个正常情况和105种个故障情况。在9个测试点上共得到106×9=954个电压值。通过分析测得数据可知,节点1上的电压对所列106种故障不提供任何有用的信息,始终保持4V电压,所以将其删除。节点6和节点9上的电压完全相同,所以删除节点9。同一测试点,在两种故障现象下,被测电压之差超过0.1V,则认为这两个故障可分离;若被测电压之差不超过0.1V,则认为这两个故障为不可唯一隔离的模糊故障组合。通过分析测得数据,F1与F13,F2与F4,F5与F16,F6与F20,F7与F18,F11与F15均为两个不能唯一隔离的故障。但由于它们皆与晶体管V1有关,任一个故障可通过更换V1来排除,因此,无需进一步隔离的必要[3]。与其余4个晶体管有关但不能彼此隔离的模糊故障与此类似。这样,经过整理就得到一个规范标准的故障字典。

图3 激励为U1的仿真图
3.3 故障隔离
故障字典中的结果只能检测出有无故障,并没有隔离各故障,这是因为存在着模糊组合的缘故。由于通过电路仿真进行故障模拟时,非线性器件的表达式难免与被诊断器件的特性不完全一致,上述测试点电压都是假定某个元器件值是精确的,而且PN结的正向压降实际上小于0.7V,因此故障字典中的节点电压总不免有些偏差;另外,由于待测电路中无故障元器件的容差等因素,所测得的节点电压也不免有偏差。为了最大程度的仿真电路的真实状态,通过设定在允许范围内的电阻、电容及晶体管PN结正向压降的不同值,又可得到每种故障的十组数据,篇幅所限,这里不再列举。
简单地说,被测电路可视为只有六种故障,即正常状态、第一个晶体管故障、第二个晶体管故障、第三个晶体管故障、第四个晶体管故障和第五个晶体管故障。由于对所有的故障统统进行详细的分析过于繁琐,同时现实意义也不大。因此,本文通过对所得大量数据的分析得出结论:即基极断开是所有故障中最具代表性的一种故障,可以将晶体管基极断开故障看成是所在晶体管最主要的故障。这样做既符合事实规律,又可大大减小故障定位的难度,具有一定现实意义[3]。
4 BP神经网络的应用
4.1 BP神经网络的故障诊断步骤[4]
1)建立故障字典或故障状态表。测前完成故障状态点的选择和测试点的选择。应用软件模拟出电路对应各状态对应各测试点的理论值,并把它建成一个故障字典或故障状态表。
2)建立神经网络。把故障字典或状态表中的数据作为神经网络的输入,按照电路故障特征点的数目以及所优化处理得到的故障输出类别的数目建立神经网络。
3)神经网络的训练、学习。设定神经网络学习速度、训练方法及相关参数,对网络进行学习、训练。
4)利用训练好的BP神经网络进行故障隔离。将电路的故障字典建立在神经网络之中,网络的输入节点由电路的可测节点决定,输出节点由故障状态的数目决定。输出有多少个故障状态,输出层就选用多少个神经元,每一种故障状态对应一个相应的神经元。诊断是某种状态时对应的那个神经元被激活,输出其对应的编码。
4.2 仿真实验
和路视频放大器电路中设置了9个测试节点,但是节点1和9不能提供有用的信息,将这两个节点删去,则为7个关键测试点。选择6种故障现象作为神经网络的输出模式,如表3所示,因此实际的神经网络输入神经元个数为7,输出神经元个数为6,隐含层节点数p的选择目前没有统一的规则,一般可以选为:
其中,α取1~10,m、q分别为输入和输出层节点数。经过实验,确定隐含层神经元个数为9。
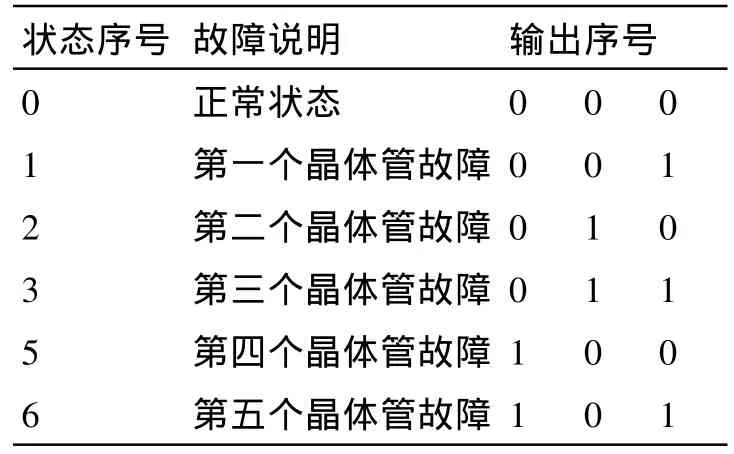
表3 BP神经网络的输出
这种集成的电路仿真所得故障样本数据经过归一化处理后作为网络的原始训练样本,系统总误差E<15,采用Matlab编程实现,网络训练 2500次,得到如图4所示的仿真波形。
4.3 结果验证
可利用电路仿真得到的其余数据验证神经网络的训练情况,如表4所示。
通过表3与表4的对比,可见仿真结果与事实相符。

图4 BP神经网络仿真波形

表4 验证数据对应的输出结果
5 结语
本文提出一种基于电路仿真获取故障样本数据,以之训练神经网络用来进行故障诊断的方法,实验证明了此种方法的有效性,值得进一步研究。
[1]李尚生,侯宪伦.某型导弹末制导雷达[M].烟台:海军航空工程学院,2000
[2]陈励华.智能故障诊断技术的应用与研究[D].西安:西北工业大学,2005
[3]王波.复杂装备D-S诊断优化技术研究[D].烟台:海军航空工程学院,2007,10:1~6
[4]高隽.人工神经网络原理及仿真实例[M].北京:机械工业出版社,2003:44~53
[5]模拟电路仿真中的故障建模技术研究[M].武汉:华中科技大学出版社,2007
[6]A.Maxim,D.Andreu,M.Cousineau,et al.A Novel SPICE Behavioral Macromodel of Operational Amplifiers Including a High Accuracy Description of Frequency Characteristics[J].Proc.Int.Symp.Circuits and Systems(ISCAS 99),1999,6(6):278~281
[7]孙峻朝,王建莹,杨孝宗.故障注入方法与工具的研究现状[J].宇航学报,2002,22(1):99~104
[8]杨士元.模拟系统的故障诊断与可靠性设计[M].北京:清华大学出版社,1993:3~7
[9]朱大奇.电子设备故障诊断原理与实践[M].北京:电子工业出版社,2004,1
[10]杜鑫,唐大全,杨应成.模拟电路故障诊断技术的发展[J].测控技术,2003,22(7):1~4
[11]辛秀华.现代模拟电路故障诊断方法综述[J].自动化与仪器仪表,2005(2):1~17
[12]G.Gordon.系统仿真[M].杨金标,译.北京:冶金工业出版社,1982
