电子罗盘的干扰抑制*
2010-08-08王勇军
王勇军,李 智,李 翔
(桂林电子科技大学,广西 桂林541004)
随着定位导航技术的飞速发展和日臻成熟,电子罗盘在相关领域得到了越来越广泛的应用。罗盘内部电路和使用过程中周围磁场环境的影响,使罗盘系统的精度和稳定性大大下降,因此,航向角显示的可靠性成为衡量电子罗盘系统性能优劣的重要指标。本文涉及的电子罗盘是基于HMC1021/1022磁阻传感器和加速度传感器ADXL202E研制的,它具有体积小、成本低、精度高、响应速度快等优点。但是从磁阻传感器输出地信号只有几百微伏至几毫伏,信噪比较小,很容易受到内外环境的影响。如何消除这些干扰信号,成为处理磁场信号、确保罗盘精度和稳定性的首要任务。
1 电子罗盘工作原理和干扰分析
在电子罗盘系统中,单片机VRS51L3074完成对磁阻传感器和加速度传感器输出信号的采集,从而获得罗盘载体位置的瞬时磁场和加速度值,然后利用函数关系计算出当前位置相对于已知参考位置之间的三轴磁场强度、横滚角和俯仰角,从而进行姿态解算得到载体的航向角[1]。当加速度计被定向时,其X轴和Y轴与地球表面平行,加速度计可用来作为具有翻滚和倾斜两个轴的双轴倾角传感器,则被测物体的俯仰角可记为γ,横滚角为β。将磁阻传感器的3个敏感轴沿载体的3个坐标轴安装,分别测量地磁场磁感应强度H在载体坐标系3个坐标上的投影分量(HX,HY,HZ)。在地平坐标系中,地磁场的三轴正交分量输出为(HR-X,HR-Y,HR-Z)。根据正交笛卡尔坐标系的坐标变换可知:
通过对式(1)的姿态解算可以得到电子罗盘的航向角:

通过实验测试,电子罗盘测量随机误差偏大或角度突变的问题时有出现。本文通过对静态与动态(罗盘低速运动)数据的分析发现,通道测量数据呈波动形式,数据中有类似周期性变化的分量。
为了摸清干扰信号的特性,找到干扰信号的真正来源,利用频谱分析仪先后对磁阻传感器输出信号进行频谱分析与监测。结果发现,传感器输出信号主谱附近存在 50 Hz、100 Hz和300 Hz干扰频率,另外还有一些噪声频谱。干扰成分在蓄电池供电条件下的干扰较市电供电条件下的干扰幅度要小,其中以100 Hz和300 Hz干扰频率为主,噪声频谱略有减小,50 Hz的干扰幅度时大时小。由于传感器输出信号中有此干扰信号,电子罗盘输出航向角也存在不同程度的起伏。
2 电子罗盘抗干扰设计
2.1 电子罗盘硬件抗干扰设计
通过分析传感器输出信号频谱中的低频干扰分量可知,这些干扰分量主要是由供电系统的工频干扰引起。若测试的信号本身变化比较缓慢,在上面叠加了工频干扰之后,它测量的值发生偏移,直接影响到测量的精度,有时甚至达不到测量精度的要求。因为50 Hz工频也是一种变化很缓慢的干扰,使用通常的方法很难将它与被测的有用信号区分开。经理论分析和试验结果可知,要降低工频干扰的影响,可从设备及硬件上做调整,也可从数据处理方法上对干扰的影响进行抑制。为了提高系统的可靠性及稳定性,通常采用屏蔽、滤波、良好接地及光电隔离等措施来抑制干扰[2],这些方法对于抑制非工频干扰很有效。传感器输出信号先经过硬件电路滤去工频的高次谐波和部分高频干扰,再由软件滤去工频的基波和低频噪声信号。
因为硬件滤波器都有一定的带宽,采用单纯的硬件电路很难将工频干扰的影响消除,对白噪声的抑制也很有限,处理不好很容易滤除有用的信号,而且硬件滤波器很难做成多个陷波点,其影响较大的低次谐波也很难滤去。所以,必须进一步利用数字信号处理的相关理论,借助VRS51L3074的高性能运算单元,使用数字滤波滤去工频的基波和噪声信号。
2.2 软件滤波
通过对多次任务数据处理分析,电子罗盘主通道测量数据可用下式模型表示:

其中,s(t)为有效磁场信号,在有限长时间内可看做直流信号;z(t)为周期性干扰分量,它是测量通道低频干扰的组合;et为白噪声序列。
对于电子罗盘信号中周期性干扰主要为50 Hz的工频干扰,可以利用正弦波等分点均值滤波法滤除。由欧拉公式可知,正弦波一周中任取n个等分点的和为零,则有:

其中,n是大于1的整数,k为任意整数,c为任意实数。式(4)左边部分可看作是式(3)的虚部:

利用欧拉公式可将式(5)写为:

其中,j是复数记号,式(2)得证。滤波算法就是取n个采样点的平均值,即:

因此,对于50 Hz工频干扰,本方法简单易于实现。n个点的平均值X本来就是一个线性低通滤波器,但它的特别之处在于当n取s/f时(s是每秒采样点数;f是欲消除的正弦波的频率;n必须是整数,否则要通过改变s来调整),此时n点对干扰波来说正好就是一周中的n个等分点,其和为零。于是干扰波被完全消除。例如采样速率为每秒250点,为消除其中混入的50 Hz工频电源干扰,将其连续5点采样求平均值后作为滤波输出。在实现方法上可将最近5点采样值及5点的和保存,每来一个新点时,在和中减去最早的点,再加上新点然后将和除以5即得均值。为了免去除法,可将n凑成4或8,将采样点改为200点或400点,此时只要用二进制右移指令即可代替费时的除法。
电子罗盘白噪声的处理采用FIR滤波法[3],其原理是对一组数据x(n)中的每个点移动平均后滤波得到的结果 y(n),即:

则其传递函数为:

其对应的噪声减少率NRR=1/N,如果需要得到较小的NRR,则需要较高的计算点数N。由传递函数知H(z)对应的截止频率ωoff=π/N,而较高的点数会造成截止频率ωoff较小,有可能对磁场输出信号产生较大影响。假如进行10点的平均滤波法计算,其噪声减少至原噪声的10%,滤波器截止频率 ωoff=0.1π。
3 干扰抑制效果测试
除了工频干扰和噪声,罗盘航向角还受传感器误差、软硬磁干扰和倾斜角度等因素的影响。对电子罗盘进行测试,首先是对电子罗盘的稳定性进行评估。实验时,通过对相同条件下同一物理量多次重复测量值的标准差大小的比较,来对其相应抗干扰性能进行评估。测试结果如表1所示。
从实验测试的标准差可以看出,经过软件滤波后均方误差σ小了很多,采用的软件滤波算法对抑制干扰非常有效。

表1 同一位置滤波前后测试结果(单位:°)
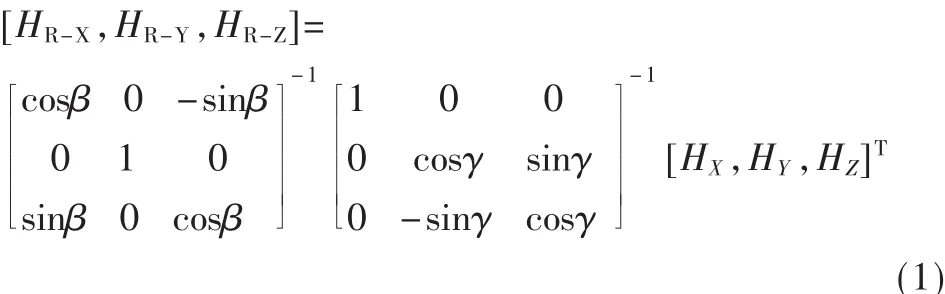
试验过程中,采用光电编码盘作为角度测量标准装置,将电子罗盘放在水平面内缓慢转动一周,对光电编码盘的输出脉冲进行计数实现参考角度的计算,每转动一下(约15°),测一次。根据测量数据建立航向误差曲线,如图1所示,实线是由原始数据量直接统计的罗盘航向误差曲线,测量随机误差为 0.5°~11.9°;而虚线是经过干扰对消法统计的航向误差,它可以控制在0.1°~7.7°之间。同时也可看到,在抑制干扰后测量数据误差仍然较大,这是受测量数据尚未消除传感器误差(主要是零位误差、标度因数和非正交误差)的影响造成的,因而在一定程度上影响了补偿效果。
单纯使用硬件滤除干扰 ,因受硬件滤波器带宽的限制,在滤去低次谐波时容易造成有用信号的失真;而单纯使用软件的方法,因受到CPU运算速度的影响,很难滤去干扰中的高频成分。使用软硬结合的方法,综合利用了两者的优点,最大限度地从被测信号中滤除了工频和白噪声信号对测量的干扰。本文提出的软件滤波算法速度快,适合处理任意固定周期的干扰信号,滤波效果理想,是一种实用的数字滤波设计方法。在此基础上进行误差校正,并引入误差校正算法,消除传感器的误差和系统的软硬磁干扰,进一步提高了电子罗盘的精度。
[1]熊剑,刘建业.数字磁罗盘的研制[J].传感器技术,2004,23(8):46.
[2]张文娜,叶湘滨.传感器接口电路的抗干扰技术及其应用[J].计算机自动测量与控制,2001(3):60-62.
[3]王树勋.数字信号处理基础及试验[M].北京:机械工业出版社,1992.