基于Gantry驱动的双直线电动机高速动态同步误差性能测试研究*
2010-08-07林献坤
袁 博 林献坤
(上海理工大学机械工程学院,上海200093)
随着工业技术的快速发展,高精度、高速和高加速度正成为新一代数控机床的发展方向。在传统进给系统中,旋转电动机带动滚珠丝杠副的传动机构存在反向间隙、惯性、摩擦力和刚性不足等问题,保证一定精度要求需要以牺牲速度为前提[1]。而直线电动机是一种没有任何中间转换机构的传动装置,直接将电能转换成直线运动机械能,主要具有进给速度快、加速度大、快速响应、定位精度高、无行程限制、效率高、运动噪声低等优点,应用直线电动机驱动高速机床正成为新一代数控机床具有代表性的先进技术之一[2]。
对大型整体工件和几何形状复杂的工件进行加工时,采用龙门柱固定的传统龙门机床难以获得高的加速度,同时又受到工作台长度和工作场所的限制[3],由双直线电动机同步驱动的龙门移动式机床让工作台与工件保持静止,龙门立柱质量相对较小,可以获得较高的加速度特性,发挥了直线电动机快速响应的优越性,因此,双直线电动机同步驱动的龙门桥式机床成为当前高速机床的一个重要的发展方向[4]。
SIMUMERIK 840D数控系统(简称840D系统)除了对轴的位置、速度、转矩等精确控制外,系统还提供了Gantry龙门同步功能供用户使用,为双直线电动机龙门同步提供了一种理想的解决方法。龙门立柱动态同步误差直接影响产品的加工质量[5],因此探索清楚由该功能驱动控制的双直线电动机动态同步性能,对于推动双直线电动机在高速龙门结构中的应用具有重要意义。本文给出应用Gantry功能实现双直线电动机同步驱动的方法,并通过双频激光干涉仪,在自构建的试验台上,对Gantry功能驱动的双直线电动机动态同步误差进行测试,给出测试方案及实验结果,总结驱动过程中同步误差的动态特性。
1 Gantry功能的实现
1.1 自构建平台的组成
图1为本文研究所用的龙门移动式直线电动机试验台结构示意图。图中直线轴X1(右)、X2轴(左)配有永磁式交流直线电动机,直线电动机的初级固定于两端龙门柱基座,次级布置于纵向的导轨底座,使整个龙门桥式结构实现纵向进给;Y轴由另一台直线电动机驱动,可实现刀架在横梁上的横向进给,用来改变龙门架的负载分布。

该直线电动机试验台控制系统如图2所示,平台中两X轴的进给由840D系统驱动实现。系统的功能由以下四部分组成:人机界面 HMI、可编程控制器PLC、数控内核NCK和数字式交流伺服驱动SIMODRIVE 611D。硬件结构主要包括840D操作面板(MMC103)、机床控制面板(MCP)、手持单元(HHU)、PLC模块、数字控制单元(NCU)、611D主电源模块和功率模块。位置测量系统采用光栅尺。外部感应模块SMEX92作用有:保护电动机、计算工作温度、连接直线电动机旁的电动机感应器并把直线电动机的位置信号反馈给伺服控制611D。
1.2 双直线电动机Gantry功能的实现
Gantry功能是840D系统针对龙门轴同步驱动控制推出的一种基于电流环、速度环、位置环的三层闭环PID控制方法,龙门轴以组的形式出现,包含主动轴和它的一个或两个从动轴,主动轴和从动轴都是直线轴,或都是旋转轴,它们都有各自独立的驱动电动机和测量系统。
设定SINUMERIK 611D驱动数据,按照以下步骤在直线电动机试验台上实现两X轴的双直线电动机Gantry功能:
步骤一:定义龙门同步轴
定义直线轴X1为主动轴,直线轴X2为从动轴,见图1。对相关驱动参数的设定如下:
AXIS 1
MD37100$MA_GANTRY_AXIS_TYPE=1
AXIS 2
MD37100$MA_GANTRY_AXIS_TYPE=11
需要手动移除主动轴与从动轴之间的位置差值时,通过设定驱动参数:MD37140$MA_GANTRY_BRESK_UP=1来可拆分强制连接。
步骤二:设定报警极限值参数
为保证龙门轴同步性能,Gantry功能包含对龙门轴组各轴的实际位置进行连续监控,当加工受力或外力干扰使主动轴与从动轴之间的位置偏差值大于报警极限值时系统报警。报警极限值参数设定如下:
AXIS1
MD37110$MA_GANTRY_POS_TOL_WARNING=0.3
AXIS2
MD37110$MA_GANTRY_POS_TOL_WARNING=0.3
步骤三:设定断开极限值参数
为了避免对机械结构造成损害,位置差值一旦超过断开极限值的情况,机床将紧急停止。断开极限值参数设定如下:
AXIS1
MD37120$MA_GANTRY_POS_TOL_ERROR=1
AXIS2
MD37120$MA_GANTRY_POS_TOL_ERROR=1
步骤四:设定回参考点最大未对准极限值参数
龙门轴靠近参考点是一个振荡的过程,分三个阶段:(1)主动轴回参考点,从动轴跟随主动轴运动。(2)主动轴回到参考点后从动轴回参考点(系统内部自动启动),主动轴跟随从动轴运动,如果有第二从动轴,则上述过程再进行一次。(3)龙门轴组的所有轴回到参考点后,主动轴和从动轴的实际位置作比较,差值大于回参考点最大未对准极限值时系统报警。回参考点最大未对准极限值设定:
AXIS 1
MD37130$MA_GANTRY_POS_TOL_REF=10
AXIS2
MD37130$MA_GANTRY_POS_TOL_REF=10
经过上述几个步骤的参数设定,直线轴X1与直线轴X2可实现Gantry同步控制功能。
龙门轴的主动轴和从动轴开机后在两个独立的坐标系统,经过Gantry功能的强制连接,操作者只需对主动轴进行编程,经过插补指令,从动轴可与主动轴保持精确同步。
2 动态同步误差测试原理及测试方法
2.1 测试原理
为了掌握Gantry功能控制驱动的双直线电动机动态同步性能,需要同时监视主动轴X1和从动轴X2在同步驱动进给时的动态位移情况。
采用激光干涉仪可以对位移进行动态测量。激光干涉仪是应用雷达原理、多普勒效应及光学外差原理,利用反射镜移动时对激光束反射所产生的激光频率的多普勒频移来进行位移测量。激光多普勒测量原理如图3所示。

图中激光头射出的频率为f0,经平行反射镜反射回到探测器,当平行反射镜不动时,其反射波频率fr=f0。当反射镜以v的速度移动时(v=d x/d t,相互远离时取“+”,相互移近时取“-”),因为光程增加(减少)了2vt,反射波 fr的数值会减少(增加)2v/λ0(λ0为激光波长),即:由此可得在时间t内激光头与反射镜间的相对运动距离x为


激光多普勒测量仪采用相位探测器用来侦测相位偏移,对于每一位移的半波长,也就是相位Φ积满一个周期2π,探测器发出一个增位或减位脉冲信号,通过脉冲数可得知位移x,即:

这里N为积分满一周期2π的周期数,ΔΦ/2π是未满一周期的余量。
实现龙门同步回参考点后,在系统的参考点处两轴的位移为零值,即x1=0,x2=0。之后在任意时刻两轴的位移差值:

即为龙门同步在这一时序点的位置同步误差值。
激光所依赖的传播介质容易收到干扰,为排除这些干扰对数据结果的影响,在仿真误差值数据时,对每个时序的同步误差取值:

式中n为取样时序点。
2.2 测试方法
对两X轴双边位移动态测量采用美国光动公司的激光多普勒位移测量系统,型号为MCV-500,它是具有nm级位移测量精度的双频激光干涉仪,测量范围为数微米到数米[7]。
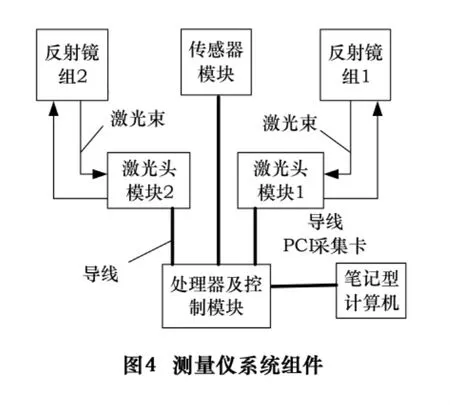
测量仪的系统组件如图4所示,使用两个激光头模块对两X轴进行测量,激光光束由架设在移动目标轴上两个反射镜组反射到激光头模块中的探测器,射出的光束与反射的光束在同一路径上,探测器向处理器模块发出相位偏移信号,处理器模块对两组激光的相位偏移信号进行计数,并通过两张PCI采集卡同时将两组数据采集到测试所用的笔记本计算机内。传感器模块用来采集环境温度、气压及材料温度,使处理器对测试结果进行自动补偿。
使用激光干涉仪对两直线轴位移进行测试的具体步骤如下:
(1)连接激光测量仪器各组件如图4,空气温度及压力传感器放置在激光光路附近,材料温度传感器放置在机床床身上,线组接好后打开电源。
(2)将两个反射镜组分别架设在需要测试的X1、X2轴龙门柱基座上。
(3)在工作台上固定激光头,确认激光光束由90°反光镜出来的方向与位移测量方向相同。
(4)调整激光头的光束和反射镜标靶使激光光束反射回激光头的接收孔。
(5)开启激光测量仪2D时间基准测量画面,设定频率、持续时间等测量参数。
(6)按照测试程序运动直线电动机,采集测量数据及保存结果。
(7)输出结果及数据处理。
3 测试及数据分析
为验证由Gantry功能所实现的双直线电动机同步驱动的动态同步性能,对于试验台在不同的直线电动机进给速度和不同的龙门负载分布情况下分别进行实验,并对实验结果进行分析。
实验一:测试不同进给速度时的同步误差值。
先将刀架进给到横梁中间,设定X1、X2轴进给加速度值a=2m/s2,进给的加速度改变可以通过伺服参数设定实现:
MD32300 MAX_AX_ACCFL=2

对主动轴X1轴进行编程,使X1轴和X2轴在0~1300mm范围内分别以v=10、30、60m/min的速度同步进给一次,对每种进给速度情况下,测出位置同步误差值。图5为a=2 m/s2时,不同速度下同步误差值比较曲线。
从图5中可以看到,使用双频激光干涉仪可以实现对两X轴双边位移的动态测量,从而测试出双直线电动机的动态同步误差值。通过同步误差值曲线的比较可以看到,龙门机构在速度稳定阶段,即位移为400~800 mm时,10 m/min和30 m/mion进给速度下的同步误差值都在25μm内波动,而进给速度为60 m/min时,同步误差值会达到45μm,进给速度增大使同步误差增大。
实验二:测试不同的龙门负载情况时的同步误差值。
同样设定试验台X1轴、X2轴的加速度为a=2 m/s2,对主动轴X1轴进行编程,使X1轴和X2轴在0~1300 mm的范围内以v=30 m/min的速度同步进给。改变刀架的位置,分别以刀架在主动轴X1处、横梁中间、从动轴X2处情况下,测试双直线电动机的位置同步误差。图6为v=30 m/min时,龙门结构在不同的负载分布情况下同步误差值比较曲线。

从图6中的同步误差值比较曲线可知,负载分布情况对于稳定速度进给时的同步误差影响较小,而在直线电动机的加速和减速阶段,即位移为0~100 mm和1200~1300 mm时,同步误差有30μm的差异,不同的负载分布明显影响同步误差值。
4 结语
应用SIMUMERIK 840D的Gantry功能,能使双直线电动机实现高速同步驱动,此实现方法便捷、有效。使用双频激光干涉仪可测试双直线电动机动态同步误差,对其主动轴与从动轴的动态同步性能进行测试分析后,有如下结论:
(1)主动轴与从动轴的动态同步误差随着直线电动机进给速度的增大而增大。
(2)不同的龙门负载分布对于直线电动机在稳定速度进给时的同步误差值影响较小,对于直线电动机在加速和减速阶段,会明显影响同步误差值。
1 郭庆鼎,唐光谱,唐元钢等.基于自适应控制的双电动机同步传动控制技术研究[J].机械工程学报,2002,38(2):79 ~81
2 林健,汪木兰,左健民等.直线电动机在数控机床中的应用[J].机械制造,2008,46(1):53 ~56
3 Min-fu Hsieh,chin-Juei Tung,Wu-Sung Yao.Servo design of a vertical axis drive using dual linear motors for high speed electric dischargemachining[J].International Journal of Machine Tools & Manufacture.2007,47(3):546-554
4 代晓明,杨庆东.高架桥式龙门高速加工中心直线进给系统的设计[J].机械制造,2005,43(1):12 ~14
5 王丽梅,郭庆鼎.数控龙门移动式镗铣床的同步控制策略[J].制造技术与机床,2005(4):85~87
6 SIEMENS公司.SINUMERIK 810/840D简明调试技术手册,2006.
7 OPTODYNE.MCV-500 User’s Guide,2005.
