CTCS-2级与CTCS-3级列控系统兼容性仿真研究
2010-08-06郭丽娜王俊峰
郭丽娜,王俊峰
(北京交通大学轨道交通控制与安全国家重点实验室, 北京100044)
我国的列车运行控制系统(CTCS)根据功能要求、运行速度和设备配置,分为0级~4级。目前我国正在大力发展建设CTCS-3级列控系统。除了速度上的差别外,与CTCS-2级列控系统相比,CTCS-3级列控系统增加了无线闭塞中心(RBC)来下达行车许可(MA),通过GSM-R网络通信实现了车-地间的双向通信。
CTCS-2级列控系统是CTCS-3级列控系统的后备系统。在一些特殊状况下,列车需要在运行中从CTCS-3级控车降级为CTCS-2级控车。鉴于CTCS-2级和CTCS-3级列控系统在设备和运行速度上都存在较大差异,因此从系统设计的层面上解决二者的兼容性问题十分必要。其中,应答器设置和降级切换是CTCS-2级和CTCS-3级列控系统兼容性问题中两个比较重要的问题。
1 应答器的间距设置
CTCS-3级列控系统应答器的布置需要同时满足CTCS-3级和CTCS-2级列控系统的需求。
相邻应答器的距离应大于列车在以最高速度压过应答器能够完整接收报文这段时间走过的距离。考虑的因素有列运行速度(V)和报文传递时间(t)。CTCS-3级列控系统的运行速度为300 km/h~350 km/h。报文分为长帧报文和短帧报文。传送长帧报文时,应答器与车载天线的有效作用时间为5.1 ms,传送短帧报文时,应答器与车载天线的有效作用时间为3.6 ms。由此可以得出两个应答器之间的距离S为:

因此,只要按CTCS-3级列控系统的标准计算出的应答器距离也满足CTCS-2级的要求。计算得到传送长帧报文,要求相邻两个应答器的距离应该大于0.5 m,即应答器组内的间距只要大于0.5 m就可同时满足CTCS-2级和CTCS-3级的要求。
2 降级切换
2.1 降级情况
降级切换通常是由突发故障导致的,往往不是在级间切换边界进行,没有级间切换应答器,不符合正常的级间切换条件。因此,研究突发状况的降级过程,确保CTCS-2和CTCS-3级列控系统的可靠切换,具有现实意义。
2.2 降级过程
本文主要研究以下几种故障的降级过程。
2.2.1 车载设备故障模式
车载设备发生故障时,通过GSM-R向RBC请求注销;同时,列车触发常用制动,直到速度降至满足CTCS-2级列控系统运行所允许的速度;告知RBC速度降至CTS-2级允许速度,RBC发送注销许可, RBC释放对列车的控制;切换为CTCS-2级列控系统控车运行。
2.2.2 地面设备故障
地面设备种类比较多,本文只研究其中的RBC故障和应答器故障。
(1) RBC故障
RBC采用双套冗余设备。如果两个RBC都发生故障,列车与RBC通信超时,那么列车自动触发最大常用制动,直到速度降至CTCS-2级控车允许的速度,切换为CTCS-2级系统控车运行。当列车压过RBC连接应答器组时,重新尝试与RBC建立连接,直到连接成功,切换至CTCS-3级控车。
(2) 应答器故障
当压过一个应答器,没有收到报文,或报文出现错误,列车向RBC报告当前列车位置,并触发最大常用制动,直至速度降至CTCS-2级允许的速度。然后向RBC请求断开连接,RBC发送注销命令,列车切换为CTCS-2级系统控车,RBC删除该车信息。列车行至下一组应答器,如果应答器报文正确,则人工切换为CTCS-3级控车,但仍按CTCS-2级的速度距离曲线行车。与RBC建立连接后,列车按照CTCS-3级的速度距离曲线行车。
2.2.3 无线通信设备故障
GSM-R故障时,车载与RBC通信中断。列车按原有的行车许可行车,并尝试与RBC通信,仍通信超时,列车触发最大常用制动。将速度降至CTCS-2级列控系统允许的运行速度,列车切换为CTCS-2级控车,关闭与RBC通信连接。直到列车压过下一个RBC连接应答器组,尝试通过GSMR连接RBC,发出呼叫请求,直到列车与RBC建立连接后,切换成CTCS-3级控车。
3 仿真设计
3.1 兼容性验证仿真模型
采用HLA(高层体系结构)方式建模,采用数据驱动方式进行仿真验证。
HLA提供了一套基于模拟系统开发与互联的标准。在HLA中,整个系统作为一个联邦,具有相对独立功能的模块作为联邦成员。各成员模块间通过RTI相互通信。HLA的优点在于RTI提供底层通信,不需考虑通信的问题,只需设计上层应用模型即可。
本模型仿真的是列车在模拟线路上的运行过程。图1为本模型的结构图。
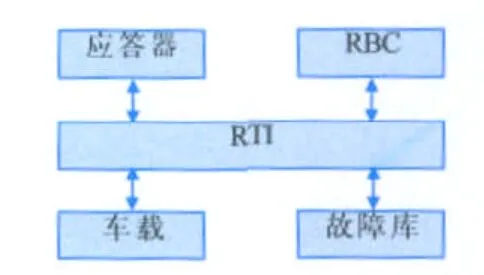
图1 模型结构图
图1中,应答器、RBC、车载和故障库共同构成一个联邦。它们各自都是该联邦中的一个联邦成员。联邦成员通过“发布”确定向外发送的信息,通过“订购”确定接收的信息。每个输入端口都有与其相对应的输出端口。
3.2 仿真模型中联邦成员之间的数据传递
联邦成员之间的数据传递如图2。

图2 数据流图
3.2.1 应答器联邦成员
应答器联邦成员主要用于模拟铁路线路,订购车载成员的位置信息,向车载成员发布应答器报文。编写应答器数据表,其中包括应答器编号及其在线路上的位置。线路的模拟以应答器作为参考点。始发站为起点,每组应答器最先被压过的应答器位置是确定的,组内其他应答器的位置是可更新的。当组内应答器的间隔设置发生变化时,以组内第1个被压过的应答器位置为基准,组内其他应答器位置根据间隔的设置自动进行更新。通过读取应答器报文数据表向车载成员发送报文。当收到应答器故障信息,则根据故障类型对列车运行前方应答器发送的报文情况进行设置。
3.2.2 车载成员
车载成员是模拟一辆列车以一定的速度运行和在运行过程中与其他相关设备的通信,即与应答器和RBC通信。车载成员向应答器成员和RBC成员发送列车位置信息,从应答器成员处接收报文,从RBC成员处获得行车许可。当收到车载故障信息和GSM-R通信故障信息后,根据信息类型,自动进行降级处理。
3.2.3 RBC成员
RBC成员根据列车运行情况,向列车发送行车许可。当出现RBC故障和GSM-R通信故障时,做与降级运行相关的操作和处理。
3.2.4 故障库成员
故障库成员主要用来设置故障类型,对参数值的设定和方案进行评价。故障成员读取故障数据表,根据故障数据表,向车载成员、应答器成员和RBC发送故障类型和各设备因设置故障需要更新的参数,并存有预期结果脚本。预期结果脚本与测试结果做比较,根据比较结果对解决方案进行评价,判断实验参数设置得是否合理。
4 基于数据驱动的兼容性方案验证
本文采用数据驱动的方法对上文所述的应答器间隔设置和各种降级情况的过程进行验证。数据驱动是使用存档的测试数据来驱动测试过程。测试数据存储在独立的数据文件中。因为数据与脚本分离,设计思路简单,如果要修改某一降级过程,只需修改相应的脚本即可。
4.1 验证应答器间隔距离
建立一个应答器的编号和位置数据表。每个应答器在这个数据表里都有其相应的编号和其所在的位置的公里数。列车的位置与某个应答器的位置一致时,该应答器向列车发送相对应的应答器报文。即调用报文脚本,向列车发送相应的报文。当应答器间隔距离发生变化时,重新触发一个行车案例:加载一辆列车,先以CTCS-2级最大允许速度行车,压过应答器时,应答器向列车发送长报文。该报文是由应答器脚本提供。然后将车载收到的信息与应答器报文脚本对照,以验证该距离能否满足CTCS-2级行车要求。然后切换至CTCS-3级最大允许速度,用同样的方法进行测试。如果在CTCS-2级和CTCS-3级都可以准确收到报文,那么说明这个距离满足两级列控系统应答器共用的要求。
4.2 降级测试
故障库成员包含有一个故障数据表、4个故障脚本和4个预期结果脚本。故障数据表中每一项对应一种导致降级的故障。周期性地读取故障数据表,每一项数据代表一种故障。每一项的正常数据为0,当某一项数据变为1时,该项数据对应的故障被激活,然后调用相应的故障脚本,将故障脚本信息通过相应的端口发送至相关的联邦成员。对其他联邦成员的参数进行更新,设置降级验证场景。对于其他联邦成员来说,由于内部参数发生了变化,成员即调用相应的降级处理脚本,对降级过程进行模拟。记录降级过程中各设备的状态和结果,通过与预期结果脚本相比较,评判降级过程是否合理,是否达到了兼容性的要求。
如果参数设置不合理,可修改数据表中的数据对参数进行优化。如果处理方法不合理,可通过修改相应的故障处理脚本实现对方案的修改。这样,每一次修改都有针对性,且不会对其他模块产生影响,提高了模型的可修改性和可重用性。
5 结束语
本文分析了CTCS-2级列控系统和CTCS-3级列控系统兼容性需要解决的问题,提出了解决方案。使用HLA的建模方法建立兼容性测试模型,并采用数据驱动方式设计了测试案例。HLA建模方法提供了可靠的通信平台,简化了模型。使用核心数据来驱动测试增强了测试脚本的可修改性和可重用性。
[1] 王化深,王俊峰. 200-350km/h列车运行控制系统关键技术研究[J] . 铁道学报,2009,6(31).
[2] 肖甜,赵会兵. 欧洲应答器编码策略的安全性研究[J] . 铁道学报,2008,12(30).
[3] 周福娜,汤天浩,文成林. 一种数据驱动的多故障诊断方法研究[J] . 控制工程,2008,6(15).