模糊自适应PID在肿瘤热疗温度控制系统中的应用
2010-07-19黄建林叶剑
黄建林,叶剑
珠海和佳医疗设备股份有限公司,广东 珠海 519030
模糊自适应PID在肿瘤热疗温度控制系统中的应用
黄建林,叶剑
珠海和佳医疗设备股份有限公司,广东 珠海 519030
本文分析了肿瘤介入热疗机的温度控制系统特性,设计了一种有效的恒温控制算法——模糊自适应PID。实验表明,该恒温控制算法具有适应能力强,动态特性好,稳态精度高等品质。
肿瘤介入热疗机;PID;温度控制系统;肿瘤热疗
0 前言
肿瘤热疗是用加热方法治疗肿瘤的一种方法,即利用有关物理能量在组织中沉淀而产生热效应,使肿瘤组织温度上升到有效治疗温度,并维持一段时间,以杀死癌细胞,又不损伤正常细胞的一种治疗方法,其最大特点是可增加放疗化疗效果又无毒副作用,尤其对某些局部肿瘤的控制作用是其他方法无法比拟的[1,6]。肿瘤介入热疗机是以球囊导管阻断肿瘤供养血管,将温度精确的高温液体注入到肿瘤病灶内,使肿瘤营养血管破裂,从而破坏肿瘤营养血管床,热液渗漏到肿瘤组织间,实现组织间加热,使肿瘤组织凝固坏死,从而达到治疗效果。有关研究表明:当治疗温度超过43℃时,温度每增加1℃,治疗时间可缩短1/2[2]。因此,在热疗临床应用中进行精确的温度控制显得十分重要。
1 温度控制系统分析
肿瘤介入热疗机由加热系统、注射系统、计算机控制系统等构成。其中加热系统由加热管、循环水泵、调功器、温度感应放大单元、管路、热交换筒、热交换媒体等构成。其治疗温度控制过程可分为三个阶段:注射前热交换筒内水浴加热至目标控制温度;治疗开始注射后热交换筒内水浴提升使盘管出口温度至目标控制温度;治疗时盘管出口温度维持在目标温度精度范围。第一阶段水浴温度控制只是对盘管内药液的预热,还没有开始注射治疗,不会对治疗效果有直接影响。第二阶段开启了注射系统,药液以一定流速注入治疗病灶部位,此阶段控制应尽量缩短药液温升时间和减小盘管出口药液温度的超调量。第三阶段是整个治疗控制的关键,温度控制的好坏直接影响治疗的优劣。

图 1 肿瘤介入热疗机的温度控制系统
肿瘤介入热疗机温度控制系统的被控制对象由调功器、加热器、水与管路组成,其结构如图1所示。由于目前产品中采用的调功器响应延时,加热器与水、水自循环和管路之间热交换延时,采用的温度传感器具有滞后特性,整个加热系统还受环境、管路内药液流速及材料特性等的影响,因此该机的温度控制系统是一个非线性、大时滞控制系统。采用普通的功率分段控制和开关控制以及传统的PID控制很难达到系统的温度控制精度,要获得更好的治疗效果,必须采用更精确的温度控制。
2 恒温控制方案
对于非线性、大时滞控制系统,采用常规的PID调节器或改进型PID调节器,温度控制精度不高,特别是温度超调较大。模糊控制可以将人的经验、智慧总结提炼成模糊规则,模仿人的控制经验而不依赖对象的模型进行直接推理,具有系统响应快、超调小、过渡过程时间短等优点,其应用越来越广泛,成为智能控制的一个重要方面。模糊自适应PID控制器是一种在常规PID调节器的基础上,应用模糊集合理论根据控制偏差、偏差变化,在线自动整定比例系数、积分系数和微分系数的模糊控制器。模糊逻辑控制器动态性能抗干扰性和PID控制器稳态精度高,取两者的优点就构成模糊自适应PID控制器。其控制器不仅保持了常规PID控制器的优点,而且具有很强的鲁棒性和适应性[3]。
模糊自适应PID控制器以偏差和偏差变化作为输入,可以满足不同时刻偏差和偏差变化对PID参数自整定的要求。利用模糊控制规则[4,7]在线对PID 参数进行修改,便构成了模糊自适应PID 控制器,其结构如图2 所示。
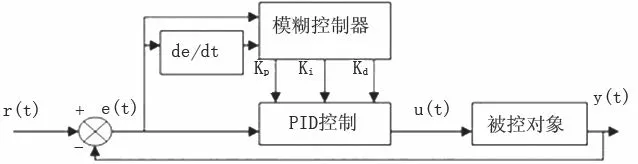
图 2 模糊自适应PID控制结构图
针对本公司肿瘤介入热疗机产品特性,采用偏差e和偏差变化ec作为输入变量,以△Kp、 △Ki和△Kd作为输出。经过大量的调试,模糊集E及模糊集EC均取为{NB,NM,NS,Z,PS,PM,PB},论域为[-3,3];模糊输出△Kp取为{NB,NM,NS,Z,PS,PM,PB},论域为[-0.3,0.3];△Ki取为{NB,NM,NS,Z,PS,PM,PB},论域为[-0.06,0.06]; △Kd取为{NB,NM,NS,Z,PS,PM,PB},论域为[-3,3]。E、EC、 △Kp、 △Ki和△Kd采用中间分辨率强的三角隶属函数。模糊推理采用Mamdani(玛达尼)方法[5],模糊量的反模糊化采用重心法,该方法是取模糊隶属度函数曲线与横坐标轴围成面积的重心作为输出量。经过模糊推理后,对整定的3个修正参数进行反模糊化,得出PID 的各个调整参数。实现模糊PID 的参数调整算式如下:Kp=△Kp0+△Kp、Ki=△Ki0+△Ki、Kd=△Kd0+△Kd,式中:△Kp0、△Ki0、 △Kd0为初始值,采用常规PID参数整定法得到;△Kp、 △Ki和△Kd为经模糊推理后得到的PID 的调整参数值。
PID控制采用增量式输出,PID参数在线整定流程如下图3。

图 3 PID参数在线整定流程图
3 应用
由于受环境散热及药液注流率波动等的相互影响,肿瘤介入热疗机的温度控制动态特性很不稳定。利用模糊自适应PID算法实时动态的补偿干扰产生的影响,温度控制系统从而获得较好的动态特性。根据系统要求,采用目标温度与盘管出口温度之差作为控制器偏差输入,控制器输出调控电压值,系统的动态恒温控制精度达到±0.2℃,稳定性很好。本公司肿瘤介入热疗机在常温25℃下水的实际控温效果如图4所示,从图中可见,治疗过程中盘管内水的温升很快,超调量很小,治疗控制温度基本为一条直线。
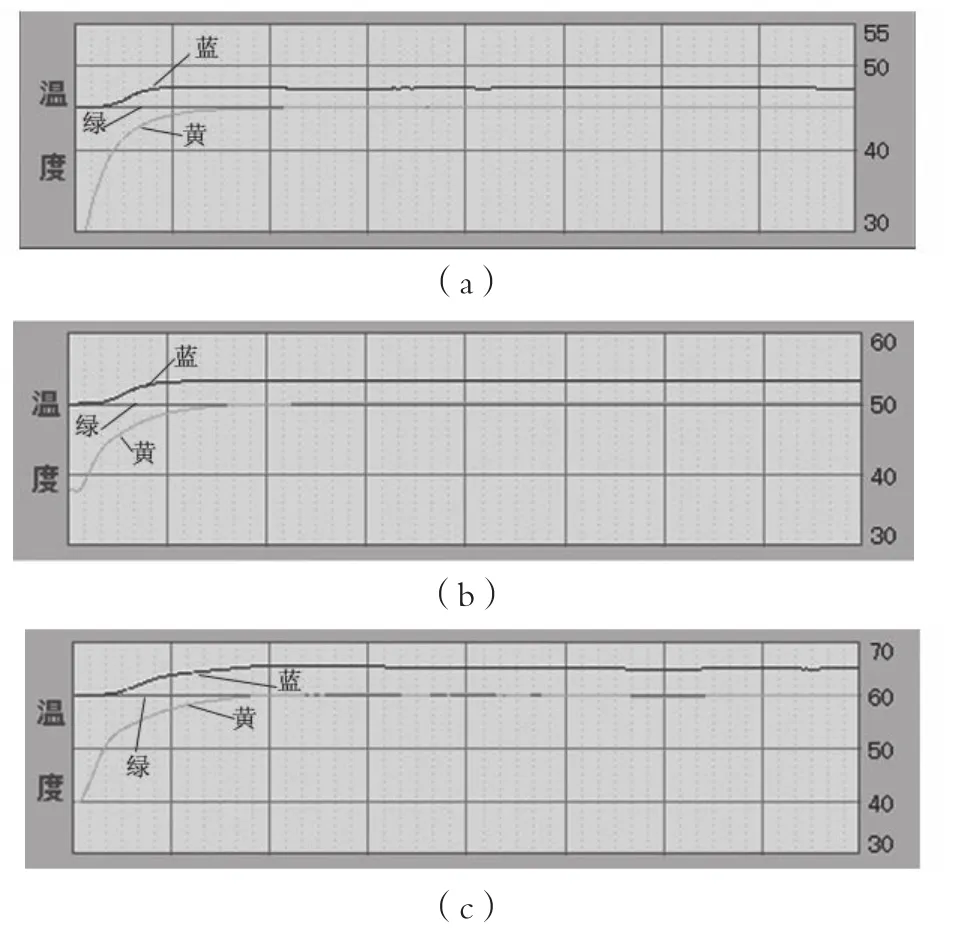
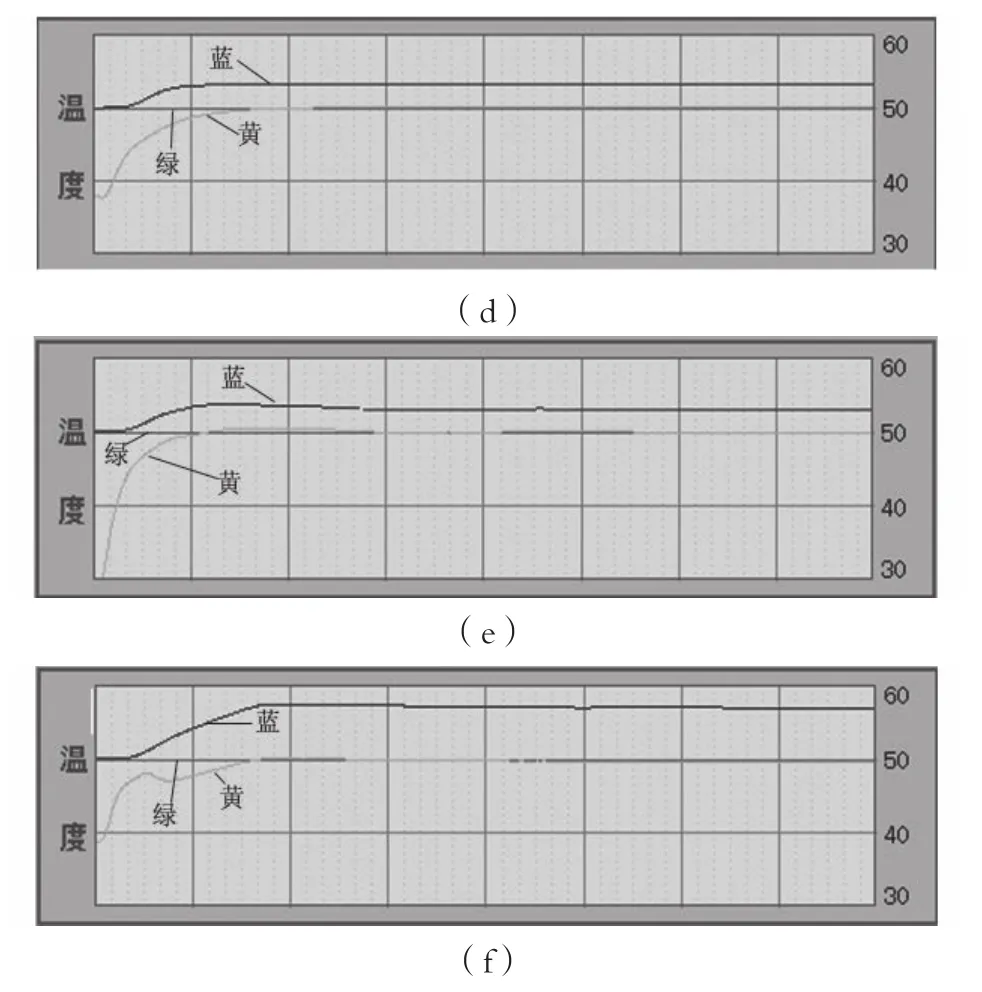
图 4 治疗过程的温度曲线
图4中横坐标表示治疗时间,每格表示1min,绿线表示目标温度,蓝线表示水浴温度,黄线表示盘管出口温度。(a)是目标温度为45℃流速为0.6mL/s时的温度曲线;(b)是目标温度为50℃流速为0.6mL/s时的温度曲线;(c)是目标温度为60℃流速为0.6mL/s时的温度曲线;(d)是目标温度为50℃流速为0.3mL/s时的温度曲线;(e)是目标温度为50℃流速为1.0mL/s时的温度曲线;(f)是目标温度为50℃流速为2.0mL/s时的温度曲线。
4 结论
模糊自适应PID控制器能够根据实际工况的变化实时动态调整PID参数,适应能力强,动态特性好,保证系统达到良好的控制性能指标。该算法已运用于珠海和佳医疗设备股份有限公司肿瘤介入热疗机,获得客户的一致好评。
[1] 张阳德,彭健.肿瘤治疗新方法-热疗[J].中国现代医学,2003, 13(10):53-56.
[2] 李鼎九,胡自省,钟毓斌.肿瘤热疗学[M].郑州:郑州大学出版社,2003.
[3] 李友善.模糊控制理论及其在过程控制中的应用[M].北京:国防工业出版社,1993.
[4] 林景栋,刘苗苗.基于模糊推理算法的燃气热水器恒温控制系统[J].重庆大学学报(自然科学版),2007(5):79-82.
[5] 刘金琨.先进PID控制及其MATLAB仿真[M].北京:电子工业出版社,2003.
[6] 赵磊,等.肿瘤热疗中组织热物性参数对热场分布的影响[J].中国医疗设备,2009(4):15-17.
[7] 林浩.模糊PID控制器仿真研究[D].贵阳:贵州大学,2006.
[8] Jacek Nadobny, Waldemar Wlodarczyk,Lothar Westhoff, et al. A Clinical Water-Coated Antenna Applicator for MR-Controlled Deep-Body Hyperthermia: A Comparison of Calculated and Measured 3-D Temperature Data Sets [J]. IEEE Transctions On Biomedical Engineering,2005,52(3):505-519.
Application of Fuzzy Self-tuning PID in the Temperature Control System for Tumor Hyperthermia
HUANG Jian-lin,YE Jian
Zhuhai Hokai Medical Instruments Co. Ltd,Zhuhai Guangdong 519030,China
This paper analyzes the features of temperature control system for the tumor intervention hyperthermia system, and designs an effective temperature control algorithm- fuzzy self-tuning PID. The experiment shows that the temperature control algorithm has the qualities of faster self-tuning, greater dynamic characteristics and higher control precision.
tumor intervention hyperthermia;PID;temperature control system;tumor hyperthermia
R319
A
10.3969/j.issn.1674-1633.2010.06.013
1674-1633(2010)06-0041-03
2009-11-06
2010-01-29
作者邮箱:hjlshu@126.com
