浅谈空间光学遥感器稳像技术
2010-07-18李浩洋刘兆军徐彭梅
李浩洋 刘兆军 徐彭梅
(北京空间机电研究所,北京 100076)
1 引言
由于空间光学遥感器在轨运行时会受到多重影响,引起光轴不稳定,从而影响成像品质。对于高轨的高分辨率对地观测系统来说,受光轴不稳定的影响更明显,会造成像质出现较严重的退化,使图像的对比度和分辨率降低。研究表明,若相机在积分时间内的抖动量超过0.1个像元,便不能得到清晰的图像[1]。因此,为了实现空间光学遥感器的高分辨率需求,需研究先进的稳像技术,提高系统的性能。
2 像稳定影响因素分析
影响像稳定的因素可分为以下几种:
(1)卫星平台及相机振动影响
影响成像的振动源主要有姿态调整动量轮、调姿推力器、太阳翼、相机扫描机构等。[2]
振动可以分为低频和高频2种:低频振动对像质的影响主要是引起图像变形,使图像品质下降;对于高频正弦和随机振动,将导致相机像方的像元弥散斑直径发生变化,从而出现不期望的“像移”,其对像质的影响主要是图像调制传递函数(MTF)和信噪比(S/N)下降,图像上反映的是像点灰度值下降,图像模糊。不同频率的振动会对像质产生不同的影响,同时振幅大小也对像质产生影响。
(2)卫星姿态影响
由于姿态和轨道控制系统中陀螺仪存在零漂等因素,卫星在轨运行的姿态会出现漂移。同时,现阶段姿态轨道控制系统还无法全部抑制平台出现的姿态扰动,从而不能充分满足空间光学遥感器对姿态稳定越来越高的要求。这些因素都会影响光轴的稳定,引起光学传函传递函数(OTF)下降,图像品质降低。
(3)其他
微小陨石碰撞,太阳辐射压力,地球和太阳、月亮等空间物体引力噪声及星上相机因温度变化产生的刚体微弱形变也会引起光轴抖动,造成成像不稳定的情况。此外,在对地观测时,大气散射引起的小范围高频抖动光线也会影响成像品质。[3]
3 稳像技术
空间遥感器稳像技术有姿态控制、减振隔离、光学稳像、微机械稳像、电子稳像、综合稳像等。
(1)姿态控制技术
使用最早且最普遍的方法是改善卫星的姿态轨道控制系统,提高控制精度来更好地稳定成像时遥感器的姿态和轨道,但这种方法无法达到当今稳像对姿态的高精度要求,而且研制成本巨大[4]。
(2)减振隔离技术
减振隔离技术分为被动和主动两种方式,可以抑制振动,减小振动对像质的影响。被动形式易于实现,但其在减振的同时容易引起共振,而且不能单独胜任稳像任务;主动形式优点较多,但要增加额外装置[5]。
(3)光学稳像技术
光学稳像技术是在光路中设置一些光学元件作为对不稳定图像的补偿。典型的光学稳像方法是利用光楔来控制瞄准线的方向,通过移动或者转动光楔,改变出射光线的角度和方向,来进行像移的补偿,从而达到稳像的目的。光学稳像技术的主要缺陷是仅适用于振动较小的环境条件,且补偿器的结构和制造工艺太复杂[5]。同时,如果仅依靠棱镜、反射镜或者光楔等光学元件进行被动补偿,稳定能力受到较大限制。
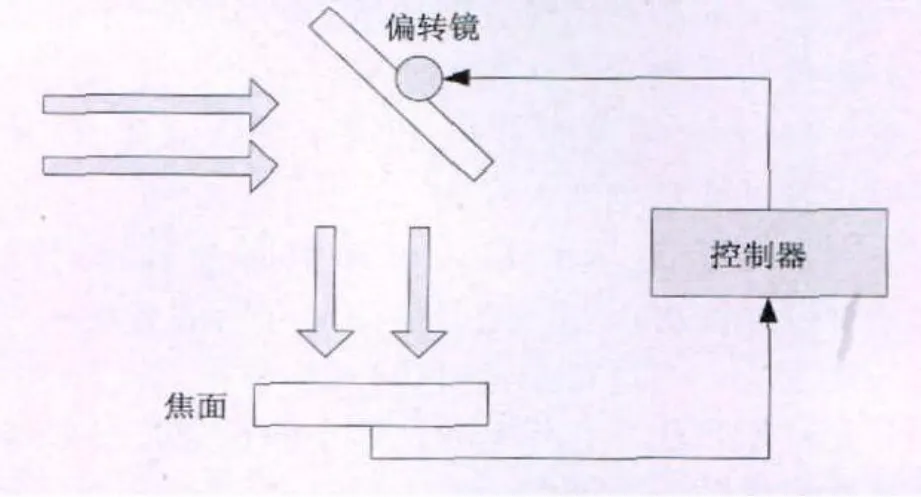
图1 偏转镜稳像系统原理
(4)微机械稳像技术
微机械稳像技术是通过微机械装置直接控制偏转镜的转动或成像焦面移动,补偿像移,完成稳像任务,图1为偏转镜稳像系统原理图,焦面接收图像,根据相应算法得到控制量,通过控制器控制偏转镜微动进行补偿。微机械稳像系统简单、结构紧凑,但需要通过一定方法来获得焦面位置并对位移进行控制。[6]
(5)电子稳像技术
电子稳像技术是应用数字图像处理的方法来直接确定图像序列的偏移并进行补偿的技术,处理流程如图2所示。电子稳像具有易操作、更精确、体积小以及价格低、能耗小等特点,其优点在于可以补偿任何形式的作用量,而不依赖任何支撑系统。[6]但目前计算的实时性不好,只用在图像后期复原和分析。随着数字信号处理器(Digital Signal Processor,DSP)等电子器件的推广使用,这种方法正在逐渐用于实时的像移补偿。[7]
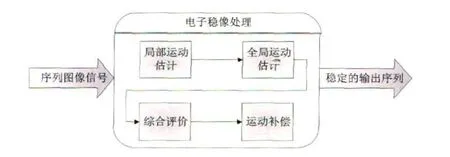
图2 电子稳像处理流程
(6)综合稳像技术
综合稳像技术就是应用多种稳像技术控制遥感器,以获得更好像质的技术。随着空间光学遥感器性能指标的不断提高,对成像环境要求也随之提高,而上述介绍的几种稳像技术受制于环境、各有利弊。随着空间光学遥感器性能的提高,成像环境复杂。为了更好的地完成成像任务,应该综合应用多种稳像技术,利用各种方法的优势满足稳像任务的不同需求,更好的地解决像稳定问题。
4 国内外发展现状及趋势
4.1 国外发展现状
国外稳像技术发展比较早,从最早的单一稳像技术到现在的综合稳像技术,已逐步应用在空间光学遥感器上,取得了较好的效果。
20世纪90年代,美国NASA的GOES I-M卫星的五波段成像仪和十九波段测深器具有稳定成像子系统。稳像子系统通过卫星姿态和轨道控制系统得到光轴偏差的数据,给扫描伺服控制器施加相应的控制信号;两台伺服电机在两个方向转动反光镜便可以有效消除光轴偏差,完成稳定成像功能。[8]
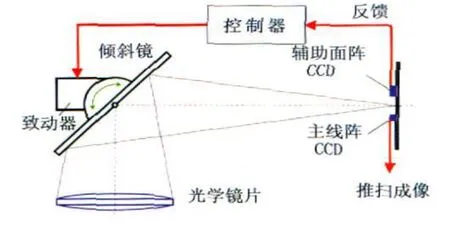
图3 推扫成像系统焦面稳定技术
2004 年,德国的Janschek Klaus,Tchernykh Valerij等人提出了一种敏捷卫星推扫成像系统焦面稳定技术[4],原理如图3。通过视觉反馈的闭环控制系统,在光路上依靠主动光机补偿来稳定焦平面上的运动图像。图像运动的实时测量是通过一个辅助面阵图像传感器和光学相关器来完成的。此系统可以有效减少姿态不稳、颤振带来的影响,提高了图像品质,使相机对卫星姿态稳定度的要求也大为降低。
2006 年,法国的Blanc P和Monroig G针对高轨高分辨率对地观测系统提出并讨论了两种互补性的方法——过累积法和闭环控制法——进行光轴抖动补偿。[9]
过累积法的目标是取足够小的积分时间来降低光轴抖动的影响,用单元积分时间获得的短曝光图像来构建最终的一幅图像。其主要缺点是:由于单元积分时间很短,短曝光图像的数目会很多,比如在2ms的积分条件下,过累积法大约需要800幅短曝光图像。
过累积法需要的大量短曝光图像给处理过程带来两个问题:首先,在两次单元积分时间中间要有固定的时间间隔用来将数据传输到存储器。过累积法处理整个单元图像序列需要几十秒甚至几分钟的时间,这样遥感器平台与地面运动物体间会产生较明显的相对运动,带来图像中运动物体模糊的问题,需要特殊的算法来解决这一问题。其次,在重采样的过程中,一般都需要处理几百幅百万像素的图像,非常耗时和耗存储空间。
为了解决以上问题,Blanc P和Monroig G首先提出用闭环控制光轴抖动,再应用过累积法进行处理的思想。其闭环控制的原理如图4所示:传感器阵列与焦面成像阵列固连在一起,直接对偏移进行测量,再通过控制器输出控制信号,改变快速倾斜镜角度补偿光轴抖动。通过闭环控制可以在一定程度上减少抖动幅度,这样过累积法2ms积分条件下所需要的800幅图像就可以减少到20~40幅。闭环控制为过累积法节省了大量的时间和存储空间,使其实际应用成为可能。
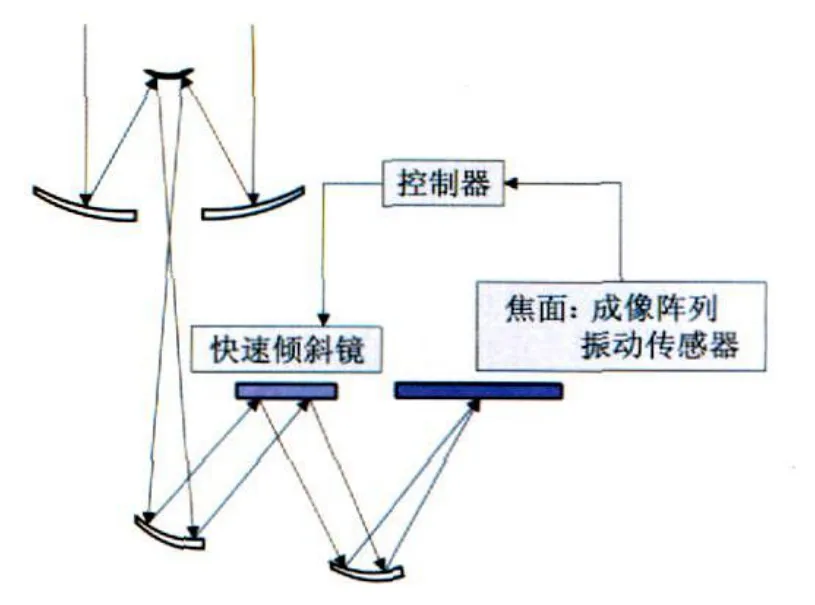
图4 闭环原理
高速小型CMOS阵列作为振动传感器,分布于成像焦面的边缘,如图5所示。这种结构的优点是:由于传感器阵列与焦面成像阵列在一起,传感器可以直接对偏移进行测量。同时,传感器与成像阵列通过同一套光学系统成像,路径相同。最重要的是,这种传感器结构简单,不需要任何附加的复杂光学或机械子系统来测量振动,如加速度计。
4.2 国内发展现状
国内在稳像方面的研究起步比较晚,对探测运动像移算法的研究比较多,在实际中应用还比较少。目前,浙江大学、中科院国家天文台、长春光机所等单位在稳像技术方面取得了一定的研究成果。

图5 传感器分布示意图
浙江大学的一些研究人员提出了利用高速CCD及电子稳像算法获得光轴偏移矢量、闭环控制焦平面微动稳定补偿的空间相机稳定成像方法[10]。其中,电子稳像部分计算过程为:首先由灰度投影算法得到整像素位移矢量;再利用抛物线插值算法分别对行列相关值序列进行插值,求取最小值,最终得到亚像素级的位移矢量探测精度。该方法的光轴补偿机构通过二维微位移执行机构驱动焦平面补偿光轴偏移,如图6。

图6 焦面主动补偿
长春光机所的李清军等人采用稳定平台与面阵CCD的TDI读出算法相结合的方法实现像移补偿。其中,相机拍照时根据速高比计算行转移频率,控制CCD的TDI进行像素转移,直到曝光结束,实现像移补偿。[11]
中科院国家天文台在其研制的太阳望远镜样机上利用相关跟踪器进行稳像控制。该技术采用面阵高速CCD完成像移的测量,利用压电偏转镜完成像移的补偿,保持入射光线基本不变,从而在确定的曝光时间内能够得到清晰的图像[12]。图7为CCD相关跟踪器原理图。
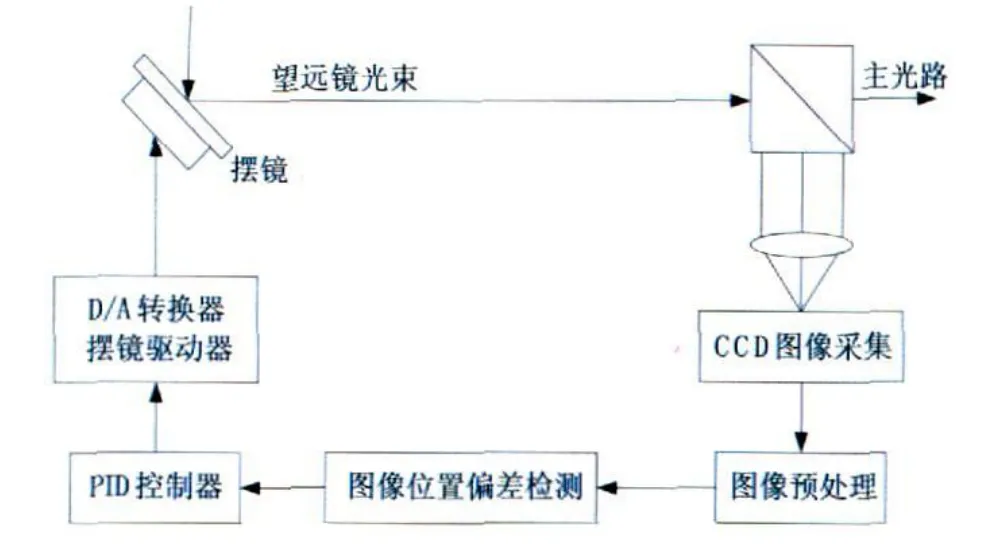
图7 相关跟踪器原理
4.3 稳像技术发展情况总结
根据空间遥感器各种稳像技术的特点以及国内外对稳像控制技术的研究现状,对现有不同稳像技术发展情况总结如下:
(1)姿态控制技术
通过平台姿态控制的改进可以实现稳像控制的效果,但是平台姿态控制改进的周期和成本是很高的,因此这种技术不是稳像控制的核心方法,只能作为稳像控制中一个综合的设计环节。
(2)减振隔离技术
减振隔离技术可以有效减少高频的干扰,能够在一定程度上减少姿态扰动对成像的影响,但不能单独完成稳像任务。对于该技术的研究还在不断的探索,通过采用先进的执行部件和智能的控制算法的配合,可以使该技术发挥出更多的作用。
(3)光学稳像技术
传统的光学补偿方法是较早采用的稳像技术,随着相机指标的提高,这种方式中已不能胜任更高任务的需要。
(4)微机械稳像技术
微机械稳像方式是对传统光机稳像方式的全面改进,具有高速、高精度的像移探测能力和补偿执行能力,并且利用该技术组成的系统还具有体积小、功耗低、对遥感器光学系统影响小和对像质影响小等众多优点,因此微机械补偿方式将成高分辨率遥感器首选的稳像技术之一。
(5)电子稳像技术
电子稳像是具有较好发展前景的技术,由于该方法不需要在遥感器成像系统附加任何机械装置,因此产生的影响最小。随着新算法和新运算器件的发展,可以实现更优的处理效果。
(6)综合稳像技术
综合稳像技术通常由2~3种稳像技术组成,采用综合稳像技术可以在一定稳像技术要求下降低各稳像单元的技术难度,也可以通过综合的方式来实现更高的稳像技术指标。因此这是未来稳像控制技术的发展方向。目前,对于单一稳像技术应用较多,综合稳像技术有一定研究,但实际应用较少,基本还停留在简单的将几种方法一起使用,未考虑各种方法之间的相互影响和联系,没有真正将各种方法综合应用。所以,为了保证综合稳像技术成功应用于空间遥感器,在继续深入研究各种稳像技术的同时,应注重分析各种技术间的联系。
5 结束语
稳定成像技术对提高空间相机成像分辨率及成像品质具有重要意义,不断提高稳像技术才能更好的满足战场侦察、目标监视、预警监测、资源勘测等各方面的需求。
作为稳像技术的发展趋势,综合稳像技术具备多种稳像方法的优点,能够适应不同领域对像稳越来越高的要求,可以更好的完成稳像任务。
我国稳像技术与国外相比还有一定差距。在发展单一稳像技术的同时,更应该注重研究技术间联系,综合应用各种稳像技术,以更好的完成航天遥感任务。
[1]陈世平.空间相机设计与试验[M].北京:宇航出版社,2003:249-250.
[2]罗彤,李贤,胡渝,等.星间光通信中振动抑制的研究[J].宇航学报,2002,23(3):77-78.
[3]周仁忠,阎吉祥.自适应光学理论[M].北京:北京理工大学出版社,1996:1-3.
[4]Janschek Klaus,Tchernykh Valerij,Dyblenko Serguei.Integrated Camera Motion Compensation by Real-time Image Motion Tracking and Image Deconvolution[C].AIM Proceedings of the 2005 IEEE/ASME International Conference on Advanced Intelligent Mechatronics,2005:628-632.
[5]郑晓锋.基于运动探测光机补偿的稳像技术[D].浙江大学,2007:1-6.
[6]赵红颖,金宏,熊经武,等.电子稳像技术概述[J].光学精密工程,2001,9(4):353-359.
[7]Vella F,Castorina A,Mancuso M,et al.Digital Image Stabilization by Adaptive Block Motion Vectors Filtering[J].IEEE Transactions on Consumer Electronics,2002,48(3):796-801.
[8]Mark McLaren,Peter Chu,Xen Price.Control-structure Interaction/mirror Motion Compensation[R].NASA Contractor Report 189672,1992.
[9]Blanc P,Monroig G.Numerical Line of Sight Stabilization for High Resolution Earth Observationfrom HighOrbits[C]//ESTEC 6th International Conference on Space Optics,2006.
[10]徐之海,陈跃庭,王琦,等.面阵空间相机稳像补偿研究[C].2006年全国光电技术学术交流会会议论文集.2006:161-165.
[11]李清军.面阵CCD相机像移补偿技术[J].计算机测量与控制,2008,16(12):1951-1953.
[12]李长松.空间太阳望远镜中相关跟踪器计算单元设计[J].天文研究与技术,2008,5(1):37-42.