噪声干扰对抗单脉冲末制导雷达技术研究
2010-07-16饶志高金嘉旺侯向辉李仙茂
饶志高,金嘉旺,侯向辉,李仙茂
(海军工程大学电子工程学院 湖北 武汉 430033)
单脉冲是一种先进的雷达角跟踪体制。很多反舰导弹末制导雷达都采用这种体制,对此多数干扰技术都难以奏效,对舰艇构成严重的威胁。因此,舰艇方须结合自身特点,采用一种有效的防御措施。目前,国外公开发表的有关噪声干扰对抗单脉冲末制导雷达的研究成果很少见到,国内相关研究也不多,有一些研究表明,噪声干扰是可以干扰单脉冲雷达的,但没有明确指出干信比或干扰机功率要达到多大时才能有效干扰。
本文针对此问题做了研究。首先,简单介绍单脉冲末制导雷达脚跟踪原理。
1 单脉冲末制导雷达角跟踪原理
单脉冲末制导雷达就水平方向而言,是在一个角平面内,同时发射两个相同的波束,使其部分重叠,其交叠方向的中心即为等信号轴。因为两个波束同时接收回波,故单脉冲测角获得目标角误差信息的时间可以很短,理论上讲,只要分析一个回波脉冲就可以确定角误差,所以叫“单脉冲”。单脉冲角跟踪技术种类很多,最常见的是振幅和差单脉冲技术。这种技术需要两个或两个以上的天线才能实现。
图1为振幅和差单脉冲系统的工作原理框图,图中和差信号形成网络用圆圈表示,它有两路输出,其中一路为两波束输出信号之和E∑,另一路为两波束输出之差EΔ。
若空间目标瞄准轴偏角为θ,则目标回波信号为
则和、差两支路输出分别为

式中,0θ为天线方向图最大点距等信号轴的偏角。
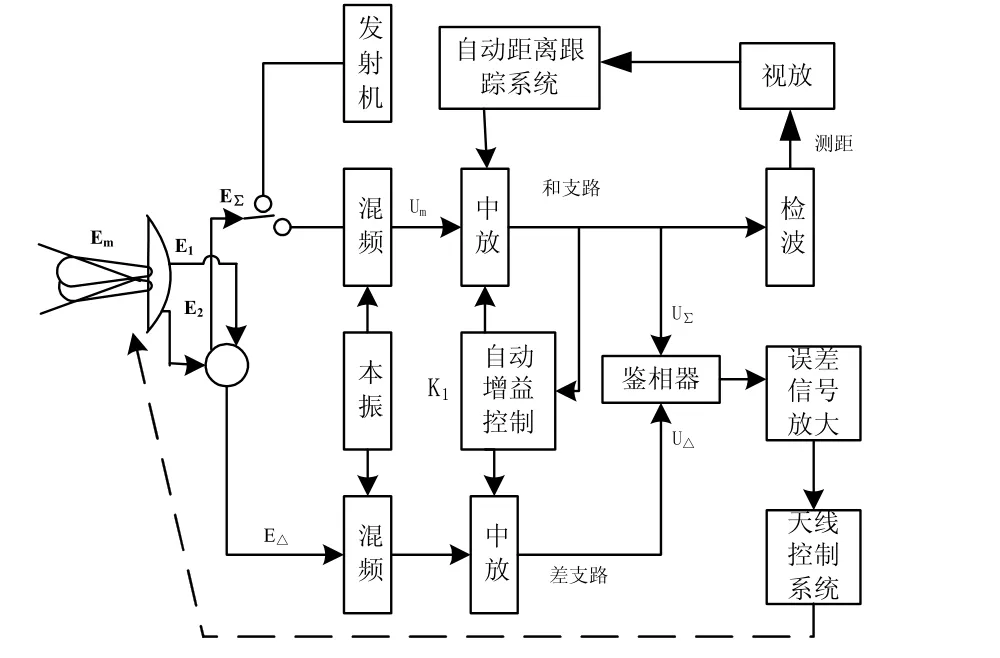
图1 振幅和差单脉冲系统的工作原理框图
设和、差两通道特性相同,即具有相同的相移及放大倍数,则中放输出信号为

式中,K0为中放放大量,ωIF为中频频率。
中放输出的和、差信号加到相位检波器的输出端,相位检波器完成对和、差相乘并求平均运算,相检器输出为

式中,Kd为相检器传输系数。在θ很小时,上式中的 F (θ0± θ)可以近似表示为

式中,Kpd是式(1)中前面几项系数的合并。μpd的作用是产生一个力矩,使天线瞄准轴向着目标方向运动,最后,误差信号为零,达到稳定平衡状态[2]。
2 噪声干扰对抗单脉冲末制导雷达
2.1 可行性分析
导弹末制导雷达要捕获目标,就必须满足以下条件:
①目标在距离上处在距离搜索范围之内;
②目标在距离上处在距离搜索波门之内;
③目标在方位上处于末制导雷达水平波束之内;
④目标在方位上处于末制导雷达垂直波束之内;
⑤目标回波强度满足末制导雷达捕获门限。
噪声干扰的主要目的是压制目标回波信号,阻止或推迟雷达导引头对目标的截获,使雷达导引头难以获得目标的距离和角度信息,或者增大距离跟踪的误差,破坏距离锁定,最终破坏对目标的跟踪。噪声干扰的最佳波形是高斯白噪声,因为它的熵值最大,最接近导引头接收系统的内部噪声,因而导引头无法区分干扰噪声和内部噪声。
依照前述单脉冲角跟踪的原理,具体分析噪声干扰对单脉冲角跟踪系统的影响。由于单脉冲末制导雷达一般采用了频率捷变体制,可以采用阻塞式噪声调频干扰样式,噪声调频干扰的数学模型为

式中,调制噪声u( t)为零均值、方差为2σ的广义平稳随机过程,fj为噪声调频信号的中心频率,KFM为调频斜率,Rj为导弹到干扰机的距离,Gj为干扰天线增益,Gt为雷达天线增益,λ为干扰机发射电磁波波长,Pj为干扰机发射功率,Prj0为雷达接收机输入端外的干扰功率。
在实施阻塞式干扰时,进入雷达接收机输入端内与输入端外的干扰功率之比为式中,d { ·}表示两区间交集的宽度;表示雷达信号工作频段(捷变频雷达为变频范围);[fjmin, fjmax]表示阻塞式或扫频式干扰频段;Δfr表示雷达接收机带宽。
1)全数据采集与存储特点。在大数据理念下,系统平台的建设支持课题项目的全数据采集与存储,平台上数据采集既要包括机构化数据,也要包括以文本、关键词等为代表的非结构化数据。由于教改项目管理非结构化的数据较多且较难分析,而往往这些数据隐含更多的重要信息,因此要着重有利于非结构化数据存储和分析的系统平台设计,以全数据采集、统计、分析为特征。
则进入雷达接收机输入端内的干扰功率为

令舰艇偏离瞄准轴θ角,则末制导雷达对舰艇的回波信号为
式中,Rt为舰艇到导弹的距离,tP为末制导雷达发射功率,λ为雷达工作波长(近似为干扰波长),Prs为进入雷达接收机的舰艇回波功率,sσ为舰艇的雷达截面积。
由于干扰机是在舰艇上,可近似认为干扰机和舰艇都偏离瞄准轴θ角且 Rj=Rt,则天线1和2接收的信号分别为
和、差信号分别为
和差信号经过变频、中放(包括自动增益控制),相位检波后,得到的角误差输出信号为

式中,Kpd是与和差支路放大倍数、相位检波器传输系数等有关的常量。假设单脉冲雷达天线为辛克函数型,由于既发射又接收信号,则为双向工作型,故有
①相位检波器输出的角误差电压与舰艇偏角大小成正比;
②当 Uj= 0 ,即无干扰时,角误差输出电压为

由噪声干扰信号引起的角误差输出平均电压与由舰艇回波信号引起的角误差输出电压相等;时,角误差输出电压为

此时,角误差输出电压近似为

干扰信号可以成功地覆盖舰艇回波信号,雷达导引头只能检测到随机起伏的噪声干扰信号。当噪声起伏干扰而且干扰功率逐渐增大时,将导致自动增益控制电路不能及时响应,角误差输出信号也随机变化并且跳变幅度越来越大,进而使得角跟踪系统不稳定,最终将遭到破坏而不能进行稳定跟踪,导引头将转为重新搜索状态。
2.2 噪声干扰引起的角度跟踪误差
为了跟踪舰艇,反舰导弹末制导雷达需要获得舰艇准确的角坐标及距离信息。对跟踪雷达噪声干扰可以引起角度和距离跟踪误差[10]。当噪声干扰功率较大时,接收机内部噪声可以忽略不计,此时,对于单脉冲体制的末制导雷达,采用角波门技术测量角度时的标准偏差可表示为[4]:

式中,θaz/el为天线在方位或俯仰上的波束宽度,fr为末制导雷达的脉冲重复频率,βn0为末制导雷达天线最佳伺服系统带宽,Bτ为接收机等效带宽和脉冲宽度之积(此处近似为1)。
2.3 噪声调频干扰下雷达发现概率的计算
噪声调频干扰时,经过单脉冲雷达接收机中放、检波和n次视频积累后,输出电压u渐近服从正态分布其中,
输出电压的概率密度函数为

将式(3)代入可得恒虚警门限为

噪声调频干扰下,当雷达与舰艇之间没有相对运动时,雷达对舰艇的发现概率为
而压制系数为
3 仿真验证
仿真中干扰机的参数为:噪声调频信号的中心频率 fj= 1 2GHz ,干扰机阻塞式干扰频段宽度d[ fjmin, fjmax]= 3 00MHz ,干扰天线增益 Gj= 2 0dB ;
导弹末制导雷达的参数为:发射信号的中心频率f0= 1 2GHz ,频率捷变带宽 Δ f = 2 50MHz,脉冲重复频率 fr= 5 000Hz,雷达天线最佳伺服系统带宽βn0=50Hz ,雷达发射功率Pt= 4 0kw,雷达天线增益Gt= 3 0dB ,雷达接收机带宽 Δ fr= 3 0MHz ,雷达天线在方位上的波束宽度 θaz= 5o,天线方向图最大点距等信号轴的偏角 θ0= 2o;
其它参数为:导弹到舰艇的距离 Rt= 2 0km ,调频斜率 KFM= 8 × 1 08MHz/V,视频积累数n=20,舰艇的雷达截面积 σs=6000m2。
图2 角误差输出电压随时间或干扰机发射功率变化关系
图 2为干扰机发射功率随时间均匀增长的情况下,角误差输出电压与干扰机发射功率之间的关系图。可以看出,在刚开始一段时间,由于干扰机功率不是很大,噪声起伏干扰引起的角误差输出电压的跳变幅度比较小;随着时间的增长,干扰机功率越来越大,角误差输出电压的跳变幅度也就越来越大。
图3 角度跟踪误差随干扰机发射功率变化的关系
图3表明了角度跟踪误差随干扰机发射功率变化的关系。根据所设定的参数,由图3可知,随着干扰机发射功率的增大,角度跟踪误差也呈增大趋势,这将导致末制导雷达天线摆动角度也越来越大,从而使得导弹的角跟踪系统不稳定。当干扰机发射功率为400w时,角度跟踪误差为天线波束宽度的 60%;当发射功率增大到1200w时,角度跟踪误差为天线波束宽度的100%,此时雷达天线实际上已经丢失目标[4],雷达导引头将转为重新搜索状态。
图4 发现概率与压制系数的关系
实施噪声调频干扰时,发现概率与压制系数之间的关系如图4所示。由于普遍采用发现概率 Pd=0.1作为有效干扰的衡量标准[5],则根据所设参数并结合图 4,可以发现,要实施有效的压制干扰,压制系数应该不小于2。
理论上分析单脉冲雷达的跟踪性能时,假定单脉冲雷达接收机对信号是完全对称的,单脉冲雷达对它的回波信号基本满足此假设;然而对噪声干扰信号不满足此假设。由于强噪声干扰的影响,使得角度跟踪误差加大,超过了雷达的精度要求,因此,强噪声干扰可以有效干扰单脉冲末制导雷达。
5 结束语
导弹末制导越来越多地采用单脉冲角跟踪技术,研究舰艇针对单脉冲末制导导弹的对抗技术很有意义。本文从理论上分析了采用自卫式噪声干扰对装备有单脉冲末制导雷达的反舰导弹进行干扰对抗,当噪声起伏干扰时,角误差输出信号也随机变化,从而导致角跟踪系统不稳定,最终将遭到破坏而不能进行稳定跟踪,使末制导雷达由跟踪状态转为搜索状态,从而有效保护已方舰艇。若在末制导雷达的搜索阶段结合无源冲淡干扰,则可大大降低舰艇被发现的概率。研究结果对舰载有源干扰装备对抗反舰导弹末制导雷达有一定的参考价值。
[1]列昂诺夫A N. 单脉冲雷达[M].黄虹,译.北京:国防工业出版社,1974.
[2]罗景青. 雷达对抗原理[M].北京:解放军出版社,2003.
[3]丁鹭飞,耿富录. 雷达原理[M].西安:西安电子科技大学出版社,2002.
[4]张锡祥. 现代雷达对抗技术[M].北京:国防工业出版社,1998.
[5]邵国培,等. 电子对抗作战效能分析[M].北京:解放军出版社,1998.
[6]高静,杨甫,王嵛琦,等. 单脉冲雷达导引头抗噪声干扰性能分析与验证[J].航空兵器,2005(5):33-37.
[7]孙富君,陶建锋,孙宏伟. 单脉冲雷达的角度跟踪干扰研究[J].现代雷达,2004,(1):17-18.
[8]鞠智芹,吴建忠,董胜波,等. 雷达导引头在自卫噪声干扰(SSJ)条件下的抗干扰性能分析[J].宇航计测技术,2003(1):45-50.
[9]I.Kanter.The Effect of Jamming on Monopulse Accuracy[J].IEEE Trans on AES,1979,5(5):738-741.
[10]邓扬建,安红.干扰条件下常规雷达效能仿真模型[J].电子对抗技术,1998(1):1-7.
[11]王鉴,张艳花. 单脉冲雷达跟踪噪声源性能仿真与分析[J].电子对抗,2005(2):11-14.
