多相异步电机的数学模型及仿真研究
2010-07-03石媛李明勇朱军
石媛 李明勇 朱军
(中国船舶重工集团公司七一二研究所,武汉430064)
1 引言
近年来,随着电力电子技术的发展,大容量的交流电机调速系统在工业中得到越来越广泛的应用。在这些调速系统中,为了减少电机电磁转矩的脉动,或者为了减轻调速系统对电网的谐波污染,有时采用多相交流电机[1]。目前,多相变频调速系统主要的应用领域有三个,一是系统可靠性要求很高的场合,二是低压大功率的传动场合,如潜艇的动力系统、核电站水冷系统、战车、城市轻轨的牵引系统等。三是大功率精密传动场合,多相变频调速系统由于其转矩脉动小,转速平稳,转矩响应快,因而适用于轧钢等对速度控制精度要求很高的场合[2]。多相变频调速系统有着广泛的应用前景,但是还有很多问题需要研究,其中最基础的问题就是多相电机的数学模型。已经有不少人研究过多相电机的数学模型,也提出了多种不同的模型,但很少有人提及它们内在的联系。本文拟从变换的本质及其物理意义出发研究不同的模型之间的内在联系,并且通过五相电机的仿真证实目前最常用的几种数学模型在本质上是一致的。
2 多相电机的常用数学模型
一般而言,n(n ≥ 3)相电机定子绕组中可以流过n个相互独立的电流,所以n相感应电机可以认为是一个n维的系统。n维空间向量可表示为:向量可以是电流、电压、磁链等正弦对称的时变信号。从几何上说,对n相电机的控制等价于将定位于某个n维空间的平面上,并使之按照给定速度旋转。而在自然坐标系下的n相感应电机数学模型是一个高阶、非线性、强耦合的多变量系统,因而完成上述控制任务十分困难,选择适当的空间变换,可以使得上述控制任务得到简化。
在三相变频调速系统中,通过一个3× 3的实矩阵将交流电机的三相对称绕组等效为一个两相绕组d、q和一个零序绕组,从而将三维空间的电流、电压、磁链等向量定位于d、q组成的平面上,使得分析过程大大简化[4,5]。三相电路坐标变换的理论基础本身并不依赖于电路的相数,因此可以将其推广到一般的多相对称系统,通过一个n× n的实变换矩阵将交流电机的n相对称绕组等效为一个两相绕组和一系列“零序绕组”,从而将n维空间的电流、电压、磁链等向量定位于某个平面上。下面将具体分析如何选取这个n× n的实变换矩阵。
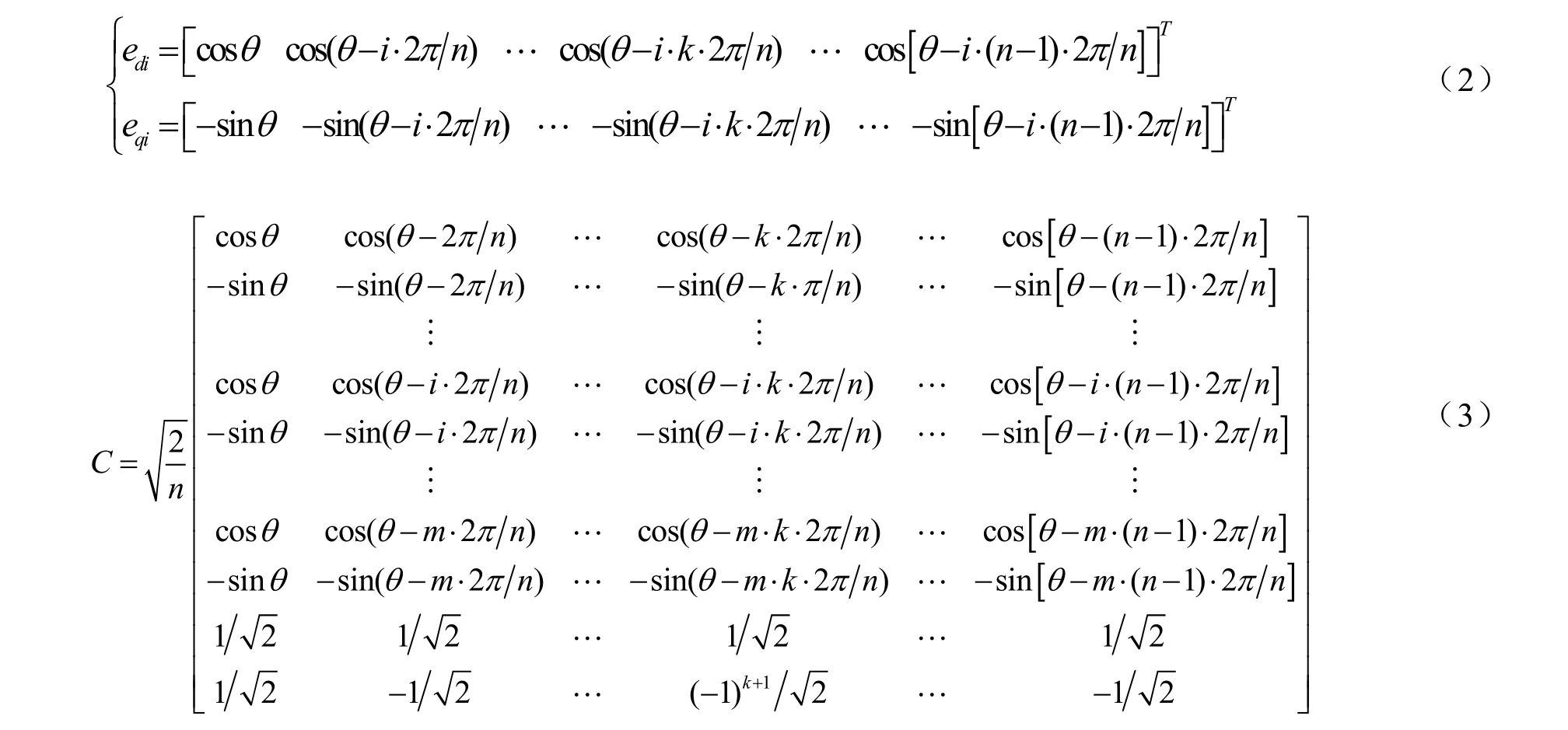
取两个线性无关且相互垂直的向量如下:

其中i=1,2,3…,为任意自然数,n为电机相数。则这两个向量可以构成n维空间的一个平面,edi(0)和 eqi(0)是这个平面的一组基,且构成这个平面内一组静止的坐标系。
设任意i次谐波向量如下:

其中i=1,2,3…,θ1=ω1t,ω1为基波角频率。
当 i = 1 时为基波向量。易证 si(θ1)是 edi(0)和eqi(0)的线性组合,因此i次谐波在 edi(0)和 eqi(0)构成的平面上,此平面就称之为i次谐波平面,edi(0)和 eqi(0)构成i次谐波平面上的一组静止坐标系, i = 1 时称为基波平面。对称分量经过坐标变换后,基波只会出现在基波平面上,i次谐波出现在i次谐波平面上,在其它平面上的投影为零,即将基波和各次谐波可以定位于相应的平面上。
如果使i次谐波平面内坐标系的旋转角速度为ω,则可取如(2)式所示两个向量,其中θ=ωt ,ω为旋转坐标系相对于定子的旋转角速度。易证edi和eqi都是edi(0)和eqi(0)的线性组合,且相互垂直,所以(2)式中的edi和 eqi构成i次谐波平面上的一组以ω为角速度旋转的坐标系。如果取i=1,2,3…,即依序取基波平面和各次谐波平面,则n×n的实变换矩阵可以取如(3)式所示矩阵[2]。当n为偶数时,m=n/2-1;当n为奇数时,m=(n-1)/2,并去掉最后一行。
如果使i次谐波平面内坐标系的旋转角速度为 iω,则可取如(4)式所示两个向量。同理可得(4)式所示的 edi和 eqi构成i次谐波平面上的一组以iω为角速度旋转的坐标系。如果取i=1,3,5…,即取基波平面和奇数次谐波平面,则n× n的实变换矩阵可以取如(5)式所示的矩阵[3]。当n为偶数时,m=n-3;当 n为奇数时,m = n - 2 ,并去掉最后一行。
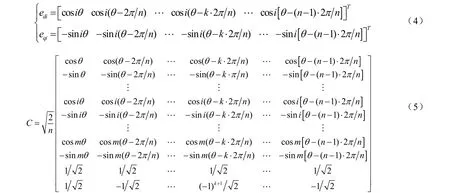
(3)式和(5)式即为目前较常用的两种多相异步电机的数学模型。通过上面的分析可得这两种模型都可以将基波和各次谐波定位于相应的平面上。 如果i次谐波平面上旋转坐标系的角速度与给定谐波信号的角频率一致,则该谐波信号在相应的谐波平面上的投影为一直流量,如果不一样,则为一交流信号。
对于(3)式中i=2,4,6…2l(l=1,2,3…)等偶 数 次 谐 波 平 面 来 说 , 因 为 cos(2l·2π/n)=cos(n-2l)·2π/n ,sin(2l·2π /n)= -sin(n-2l)·2π/n,所以(3)式中偶数次谐波平面的基与(5)式中(n-2l)次谐波平面的基相同,即(3)式中的偶数次2l谐波平面与(5)式中(n-2l)次谐波平面是同一个平面。所以(3)式中的n维空间与(5)式中的n维空间都是用相同的谐波平面构成的,只是谐波平面上的旋转直角坐标系的旋转角速度不一样,(3)式中的旋转角速度是ω,而(5)式中的旋转角速度是iω。因此这两个变换矩阵对于同一个多相异步电机来说是等效的。
3 五相电机的数学模型
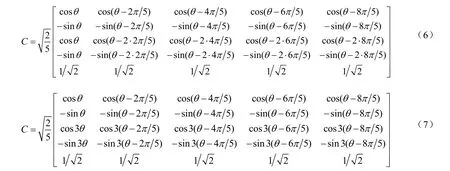
按照上面的(3)、(5)式,五相电机的两种数学模型如(6)、(7)式所示。(6)式中五维空间是由基波平面、二次谐波平面和零序平面组成,二次谐波平面上的旋转坐标系的角速度为ω;(7)式中的五维空间由基波平面、三次谐波平面和零序平面组成,三次谐波平面上的旋转坐标系的角速度是3ω。由第二节的分析可知,二次谐波平面与三次谐波平面其实是同一个平面。因此对于五相电机的坐标变换来说,上面两个矩阵是等效的。下面采用MATLAB仿真来验证其等效性。
五相电机额定参数:额定功率 PN=5.5 kW,相电压Uφ=150.111 V,额定频率fN=50 Hz,额定相电流Iφ=10.433 A,相数m=5,同步转速ns=1500 r/min,额定转速 ns=1417.8266 r/min,极对数 p=2。
电机仿真参数为L1l=0.00687 H,L2l=0.00404 H,Lm=0.0993 H,r1=0.9546 Ω,r2=0.7786 Ω,np=2,J=0.056 kg·m Ω。
分别在原始坐标系和上述两种坐标系下进行建模,电机的数学模型采用 s_fun程序编写,开环控制,正弦波叠加三次谐波给定,三次谐波幅值为基波的十分之一,空载自由启动。仿真结果如下:图1为原始坐标系下的仿真波形,图2为(6)式表示的坐标系下的仿真波形,图3为(7)式表示的坐标系下的仿真波形。
从以上仿真波形可以看出,在正弦波叠加三次谐波给定的情况下,两种情况下的仿真波形一致,说明(6)式和(7)式表示的电机的数学模型是等效的。
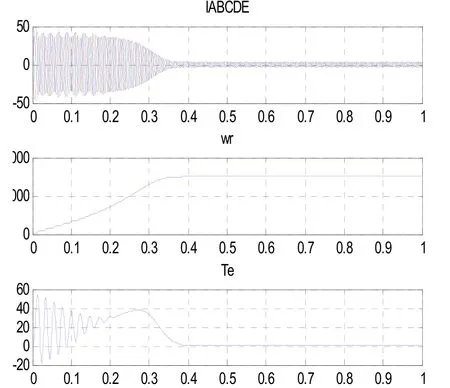
图1
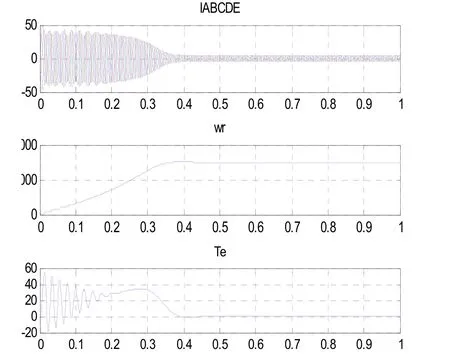
图2
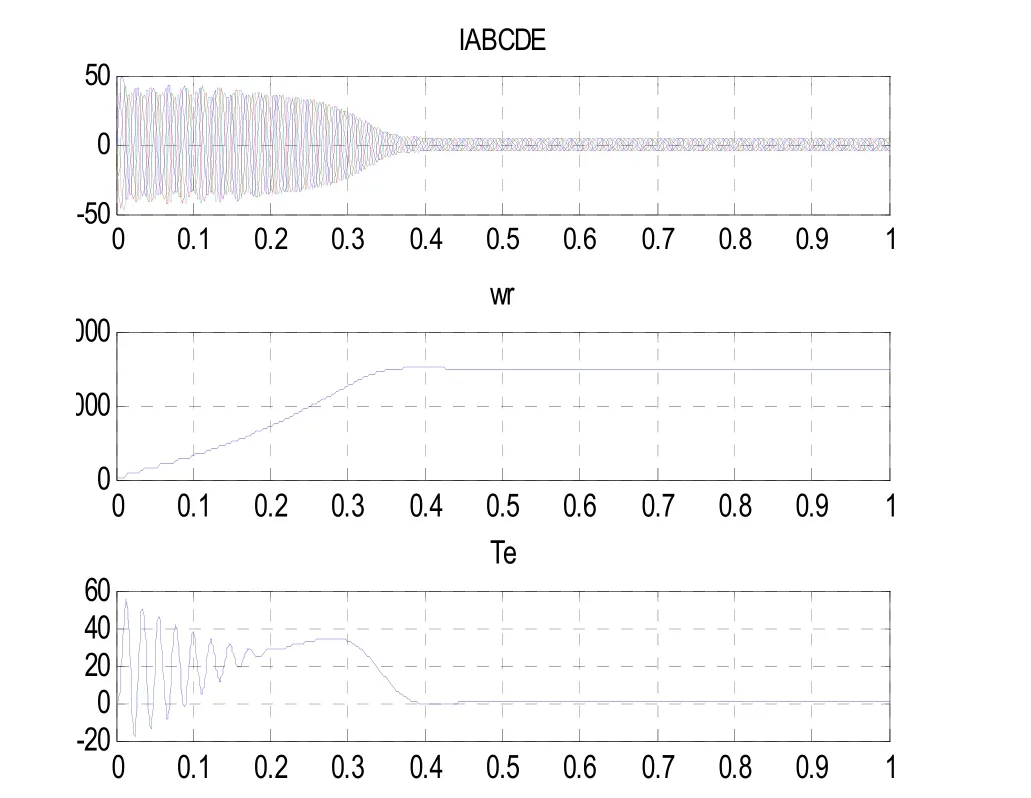
图3
4 结论
(1)以(3)式和(5)式为基础的坐标变换应用于多相对称系统时,可以将n维空间的电流、电压、磁链等向量定位于某个平面上,从而可以使多相系统的控制任务大为简化。
(2)以(3)式和(5)式为基础的坐标变换在本质上是一样的。
[1]黄进.p对极n相对称系统的变换理论.电工技术学报, 1995.2.
[2]陈菊明, 刘锋, 梅生伟, 卢强. 多相电路坐标变换的一般理论. 电工电能新技术, 2006, 25(1): 44-48.
[3]庄朝晖. 多相感应电机变频调速系统控制方法研究.武汉: 华中科技大学博士论文, 2001.
[4]陈坚. 交流电机数学模型及调速系统. 北京: 国防工业出版社.
[5]E Levi, M Tones. S N Vukosavie. Even-phase multi-motor vector controlled drive with signal inverter supply and series connection of stator windings[J]. IEEE Pro. Eletr.Power. Appl. 2003,150(5): 580-590.