三电平PWM整流器半实物研究
2010-07-03姬凯康乐高跃张启平
姬凯 康乐 高跃,2 张启平,2
(1. 中国船舶重工集团总公司712研究所,武汉 430064;2. 舰船综合电力技术国防科技重点实验室,武汉 430064)
1 引言
整流器的输入特性对电网有举足轻重的影响。常规二极管不控整流或晶闸管相控整流电路,存在网侧功率因数低、输入电流谐波含量大、输入滤波器笨重、动态响应慢等缺点,难以满足国内外相关的电网谐波标准(GB/T14549-93、IEEE519-1992、IEC1000-3-2等)。由全控器件构成的PWM整流器与之相比,具有直流母线电压可控,动态响应快,任意功率因数,网侧电流谐波小,交、直流侧能量双向传输等优点,是发展绿色变频器和四象限变频器以及新能源变换器的基础[1]。
在高压、大容量领域采用中点钳位三电平PWM整流器,具有以下优点:
① 每一个主功率开关管承受的电压应力小,且无需均压电路。
② 波形质量优,在相同的开关频率下,谐波分量减小;反之,达到类似的输出波形质量,开关频率可以降低。
③ 在同样电压等级下,降低电压跳变,即dv/dt较小。
④ 输出的共模电压较小[2,7]。
随着大功率设备在电网中的大量使用,研究其具有较大的理论意义和应用价值[2]。
2 三电平PWM整流器的数学模型和原理
三相三电平电压源型整流器(VSI)拓扑如图1所示, 建立其数学模型,是分析和研究的基础。定义开关函数
1,T1,T2导通,且T3,T4关断

-1,T3,T4导通,且 T3,T4关断
每相桥臂等效为单刀三掷开关(如图 2所示):当 S=1 时,定义 S1=1,S2=0,S3=0;S=0 时,S1=0,S2=0,S3=1;S=-1 时,S1=0,S2=1,S3=0。

图1 三电平PWM 整流器拓扑

图2 三电平PWM高频整流器等效电路
根据基尔霍夫电压电流方程,省略繁琐共识推导[1][4],ABC坐标系下数学模型:

恒功率变换到两相同步旋转d-q坐标系:
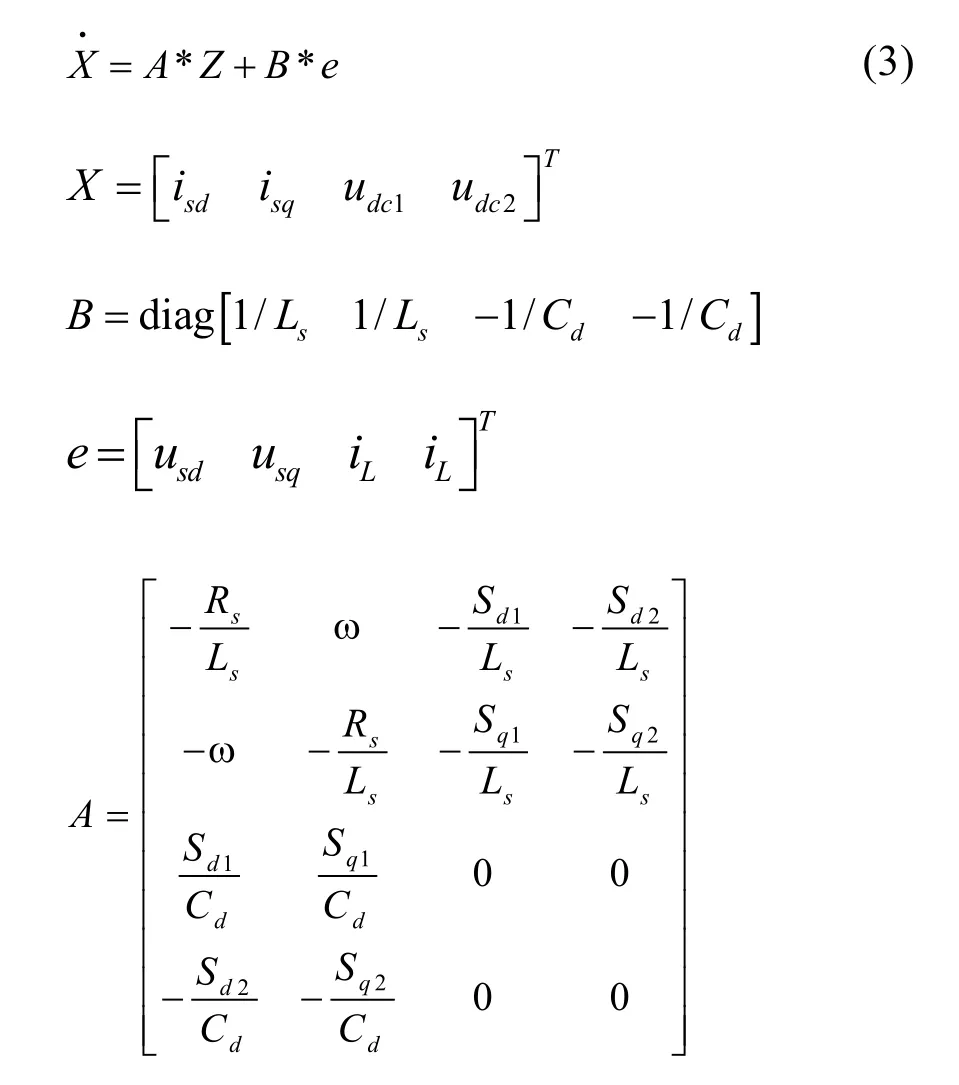
三电平PWM整流器是一个多变量,强耦合,高阶次非线性系统。
DQ坐标系等效电路如图3所示。交流侧相当于两个受PWM控制的电压源,直流侧相当于两个受PWM控制的电流源。

图3 DQ坐标下下三电平整流桥的等效电路
假设中点电位平衡,且开关频率远大于基波频率。d-q坐标系中 PWM 整流器矢量图如图 4所示。

图4 PWM整流器稳态电压空间矢量图
电压型PWM整流器的本质是Boost电路[1],调节整流器输出电压空间矢量的幅值和相位,可以使整流器在不同的有功、无功状态四象限运行。
3 三电平PWM整流的控制策略
3.1 电流状态反馈解耦后双闭环控制
PWM整流器在d-q同步坐标系下两相电流耦合,引入电流状态反馈实现d-q 轴电流的解耦控制,解耦矩阵

解耦后电流环系统变为:

解耦后的整流器类似直流电机双闭环调速系统,如图5所示。整流器输入电感类似电枢电感,输出电容类似转动惯量,有功电流类似转矩,负载电流类似阻转矩,电网电压类似反电势。双闭环特有的优点在于:电流调节器输出限幅决定了电流最大值,使整流器恒流工作;软启动保护开关器件;甚至负载短路,电流环起电流截止作用。双闭环控制的 PI调节器最佳整定法和振荡指标法在工程应用中已趋成熟[3],整流控制系统的设计几乎可以完全借用,不赘述。
3.2 负载电流前馈
双环控制中,电压调节器依据电压误差输出有功电流指令,电流指令在负载已引起电压变化后才相应改变,始终滞后。电流指令的变化还受电压调节器带宽影响,快速性受限制[3]。负载电流iL对于系统是外部扰动,若检测负载电流作为d轴电流指令前馈补偿,则将提高系统抗负载扰动能力,改善动态响应,减小控制器的负担。
用小时间常数一阶惯性环节:

Gvd(s)为电压外环,GL(s)为前馈补偿传递函数,直流输出电压为:

第一项为电压给定与实际值偏差所引起输出响应,第二项为负载电流直流输出电压干扰。设计合理补偿使第二项为零:

电流环时间常数 Tei非常小,满足的条件下,可以把电流环简化成G(s)=1,这样扰动前馈控制器Dn(s)=1,直接把扰动信号前馈[1][4]。

图5 解耦后双闭环控制整流器原理框图
负载电流可通过如图 7现今值观测器估计[1],省去价格不菲的电流传感器。
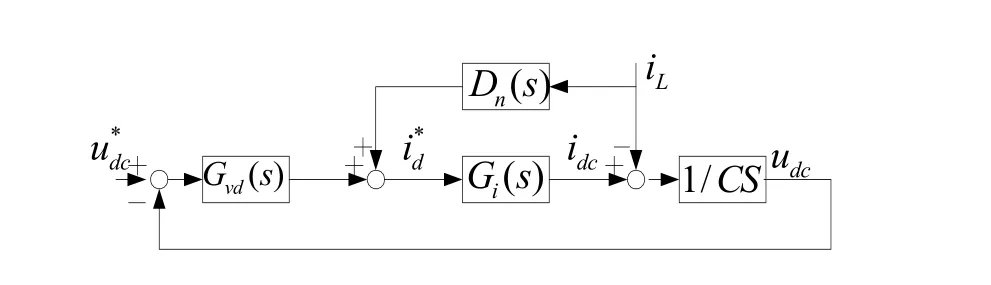
图6 前馈控制
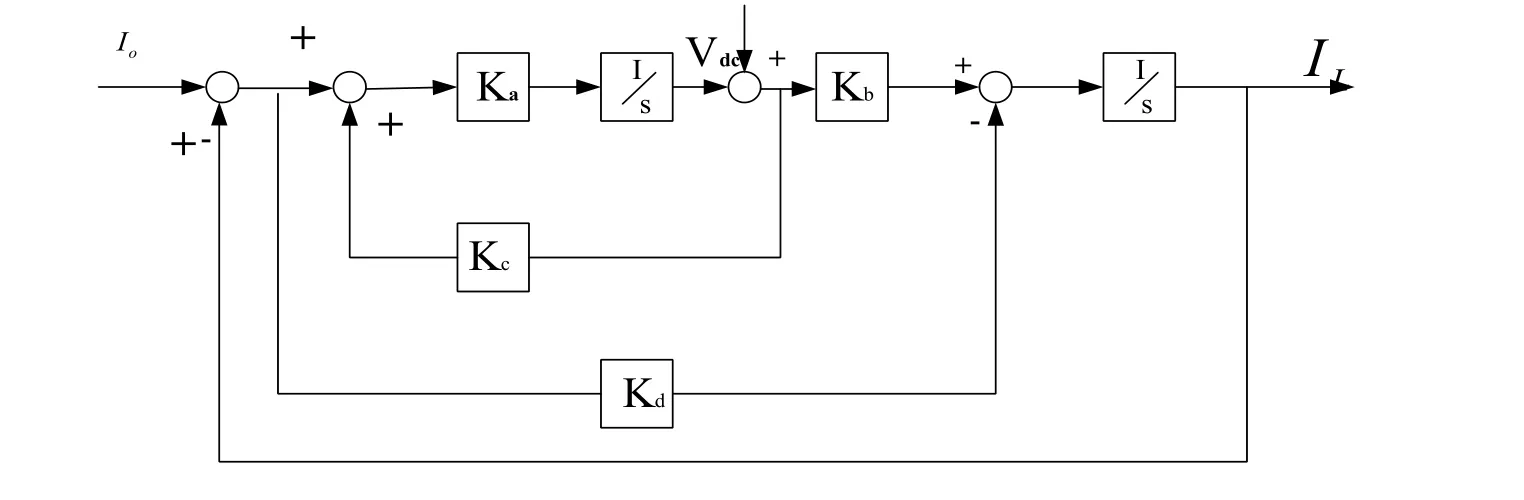
图7 现今值观测器连续域模型
其 中 : Ka=(1-L1)/Cdc, Kb=L2/Ts,Kc=L1Cdc/(1-L1)Ts,Kd=L2/Cdc。其离散化形式为:

3.3 定向矢量
电压型PWM逆变器调速系统中,感应电机在定子侧可等效成交流反电动势、定子漏感和定子电阻的电路关系[5,11]。而PWM整流磁链模型将电网看成一台无限大由逆变器供电、同步速恒速运行、定子漏感和电阻为交流侧电感及线路等效电阻的同步电机,线电压由气隙磁链感应产生的,导致虚拟磁链矢量[10]。从而磁链追踪也可用于整流器控制,在静暂态形成准圆形旋转磁场,电网电压即虚拟磁链微分量,类似交流电机FOC控制,用定子电流、母线电压和变换器开关信号构成多种观测磁链方法[11]取代传统的锁相电网电压作定向矢量。
六是实施技术引领方略,提高水资源的可用性。开源方面,积极发展海水淡化技术、雨水利用技术及替代性水源开发技术;再利用方面,提升污水处理技术、中水回用技术、生物技术水平;节流方面,加强节水设备研发、规范产业节水管理技术,应用节水评价技术;科技支撑体系方面,建立水沙监测与预测预报体系,完善水资源监控体系,建立水安全预警系统等。

相应电网电压磁链与漏磁链:

功率因数为1,简化的矢量图如图2-7。
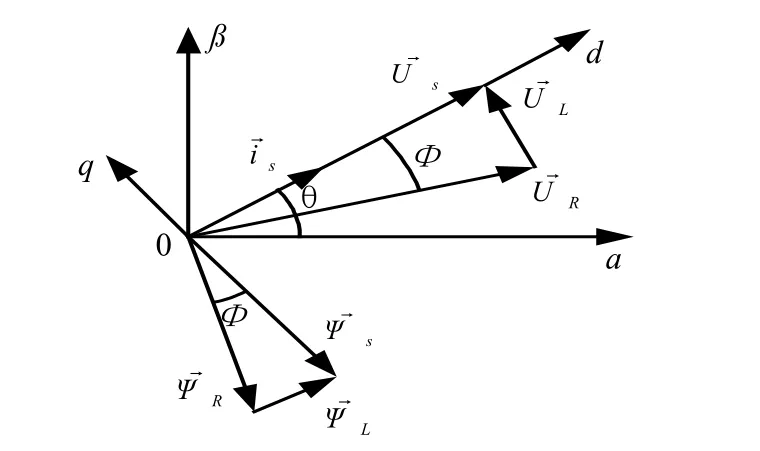
图8 空间矢量图
忽略进线电抗器电阻,在αβ坐标系:

vα和vβ为桥侧电压αβ分量,根据三电平桥数学模型由开关函数和直流电压求出,uα,uβ,iα,iβ是电网电压与电流αβ分量。直接用式(12)观测电网电压用到电流微分量,易放大噪声干扰。式(12)积分:
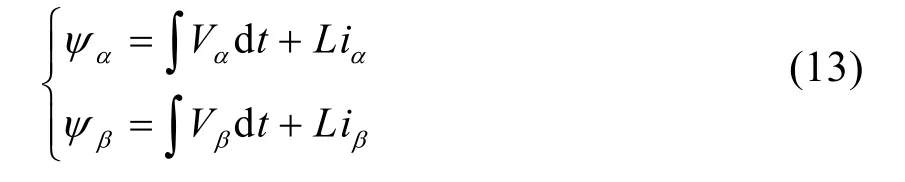
Ψα、Ψβ为虚拟磁链 α、β分量,电压矢量 V超前磁链矢量Ψπ/2,观测虚拟磁链得矢量图θ角:

式(13)含积分项,而磁链初值未知,难以直接积分,否则会引入与积分初值有关的直流偏置,导致α-β坐标系磁链轨迹是以相应直流偏置为圆心的圆。若以此磁链轨迹得到的空间角度坐标变换,则矢量定向不准确,影响电流反馈和电压矢量施加的准确性,导致起动电流冲击大、甚至无法起动。用一阶低通滤波器取代纯积分,稳态时消除直流偏置[1],相当于纯积分器加一阶高通滤波器(如图9所示);高通滤波器会造成一定的幅相误差,但选择合适截止频率,误差在工程上可忽略。图10为d轴虚拟磁链定向的PWM整流矢量控制框图。
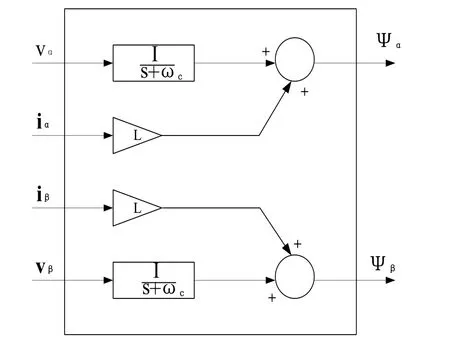
图9 虚拟电网磁链观测

图10 虚拟磁链定向的PWM整流
4 箝位型三电平拓扑中点电位控制
中点点位不平衡是NPC拓扑固有问题[8]:负载电流经各相桥臂在中线上产生3倍输出频率中线电流,流入直流电容,使两电容电压交流波动;另外扰动产生瞬时不平衡电流,及器件分散性也会造成。危害:(1)影响输出电压正弦对称性,增大低次尤其偶次谐波含量;(2)提高器件耐压要求;(3)甚至导致三电平退化为两电平。
中点电位控制的本质是控制不为零的中线电流iNP,根剧数学模型,为使iNP=0,则零序电压

其中

当中点电位已存在偏差时,平均中线电流

则零序电压应被控制为

另外,实际注入的零序电压受参考电压幅值的限制,必需满足约束条件:

中点电位完全可控区域为图11的阴影区[8]。区域外,即大调制比,低功率因数时,v0使参考电压不满足约束条件,不能完全注入,此时只能尽可能大的注入以使中线平均电流iNP尽可能小,中点电位波动可以得到改善,但不能够完全控制[3]。
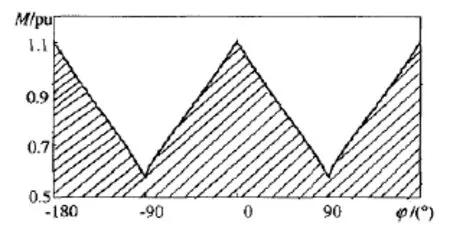
图11 中点电位可控区
式(17)的问题在于实际参考电压需要知道零序电压v0后才能得到,但是v0却又正是需要求解的量[9],本文用上一采样周期的符号近似替代,滞后的符号判断使得每个参考电压周期内仅在过零点处产生最多两个采样周期的控制误差。
5 半实物试验
搭建如图12所示的半实物实验装置,其主回路硬件基于EMEGAsim的实时模型,作为快速控制原型的虚拟试验台,控制原型基于实际的DSP控制器,对上述策略进行半实物仿真试验,既可避免全数字仿真的太理想化缺陷,又避免了全物理实际装置试验不易抓住主要矛盾的不足,并可以自由模拟各种测试条件甚至极端情况[1]。

图12 HIL试验平台
本电力电子装置同时包括毫秒级的电磁暂态过程及微秒甚至纳秒级的电力电子器件的开关过程,这样一个大时标跨度的系统,在数学上对应一个病态方程,会导致求解过程中出现数值稳定性问题;尤其是开关过程引起系统状态突变,在数值计算中带来:①由于算法不收敛引起计算终止;②由于数值积分方法的原因引起开关动作时刻的数值振荡;③在电力电子开关时刻状态变量会发生突变,而仿真结果却是通过在一系列求解网络方程实现的,假定电力电子器件开关时刻与求解网络方程的离散时刻不重合,可能导致较大的计算误差。为解决上述问题,试验中采取了如下措施:① 通过在开关器件两端引入数字吸收回路,并适当调整计算步长来改善计算稳定性;②引入插值算法,利用采样频率高的FPGA卡(100 MHz)实时捕捉采样间隔间的触发事件,正确获得开关门极触发脉冲信号,记录脉冲产生的时间及逻辑状态的改变,在模型计算过程中补偿,提高精度;有效消除由算法引起的振荡。
系统在步长取30 µs,采用四阶龙格库塔解算器,经长时间的运行,没有出现数值不稳定的情况,且半实物仿真结果和理论分析结果相一致,验证了本文所建实时仿真模型的正确性。
具体试验电路参数:交流相电压usn=106 V,频率fU=50 Hz,交流侧电感Ls=4.7 mH,电阻Rs=0.2×10-3Ω,直流侧阻感负载:Ll=5 mH, Rl=30 Ω,给定阶跃电压udc=270 V,开关频率fs=3.3 k,给定直流电压270 V,回馈逆变时,在直流负载串联400 V直流电源。试验波形如图13至图17所示,横轴10 ms/格,直流电压跟随阶跃给定响应迅速,稳态无脉动,交流电流为谐波含量很小的低畸变正弦波形,THDi= 3.87%,整流时输入电流和输入相电压相位几乎一样,实现了单位功率因数,回馈逆变时电流和输入相电压相位几乎完全相反180°,功率因数-1,中点电位波动很小,动态性能和稳态性能优良,控制策略行之有效。

图13 整流交流电流电压(15 A/格,50 V/格)

图14 回馈逆变交流电流电压(15 A/格,50 V/格)

图15 直流电压(60 V/格)
图16 中点电位(5 V/格)
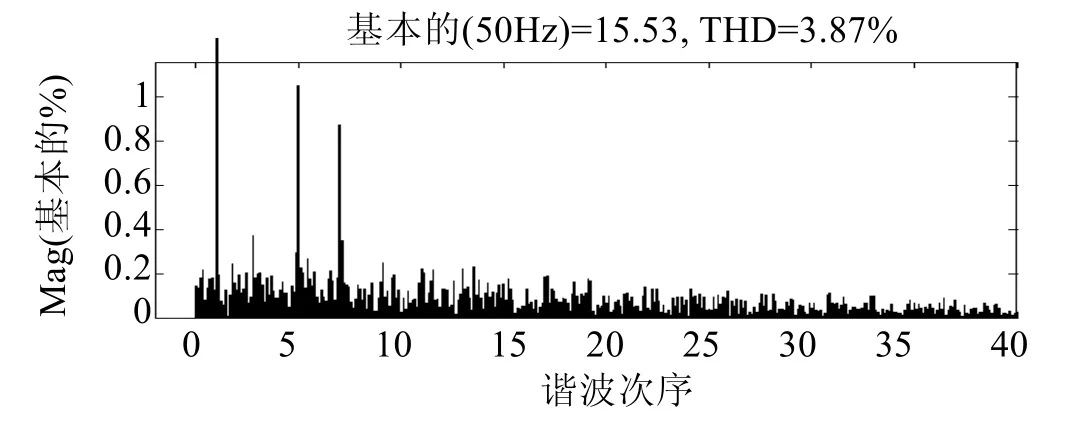
图17 交流电流FFT
6 结束语
本文基于三电平PWM整流器数学模型,采用状态反馈解耦后双闭环调节,辅以闭环观测器估计负载电流作前馈补偿的直接电流控制方案,同时通过辨识虚拟电网磁链,代替测量电网电压锁相作为控制中的定向矢量;针对三电平变换器中点电位平衡这一固有问题,采用准确解析计算使之平衡的零序电压分量,有效消除中点电位波动。最后搭建基于硬件在回路的半实物仿真实验装置,实现了低谐波双向能量传递,直流母线电压可控,动静态性能良好,验证了控制策略的可行性和有效性。
[1]姬凯. 三电平 PWM 整流控制策略实时半实物仿真研究[D]. 武汉:中国舰船研究院武汉船用电力推进装置研究所硕士学位论文.2009.
[2]李永东, 肖曦, 高跃. 大容量多电平变换器—原理控制应用[M]. 北京:科学出版社, 2005.
[3]陈伯时. 电力拖动自动控制系统[M].北京:机械工业出版社, 2005.
[4]金红元, 邹云屏, 林磊等. 三电平PWM整流器双环控制技术及中点电压平衡控制技术的研究[J]. 中国电机工程学报, 2006(10).
[5]Bimalk. Bose. Modem Power Electronics and AC Drives. [M].Tennessee, 2002.
[6]Qiang Song, Wenhua Liu, Qingguang Yu, Xiaorong Xie, Zhonghong Wang. A Neutral-Point Potential Balancing Algorithm for Three-level NPC Inverters Using Analytically Injected Zero-Sequence Voltage.[J]
[7]IEEE Trans on Industry Application.. VOL. 38, NO. 2,MARCH/APRIL 2002.
[8]Nabae.A N, Takahashi, Akagi H. A New Neutral-point-clamped PWM Inverter [J]IEEE. Trans on Industry Application. 1981. IA-17(5): 518-523.
[9]Celanovic N, Boroyevich D. A comprehensive Study of Neutral-point Voltage Balancing Problem in Three-level Neutral-point-clamped Voltage Source PWM Inverters [J]IEEE Trans Power Elec, 2000,15(3). 242-249.
[10]孟永庆,沈传文,苏彦民.基于零序电压注入的三电平中点箝位整流器中点电位控制方法的研究[J].中国电机工程学报,2007 (4):44-50.
[11]M .S c.Mariusz Malinnowski. Sensorless Control Strategies for Three-Phase P WM Rectifier[D].Warsaw University of Technology. Ph.D.Thesis,2001.
[12]陈坚.交流电机数学模型及调速系统[M].北京:国防工业出版社,1989.
[13]高金源. 计算机控制系统-理论.设计与实现[M]. 北京:北京航空航天大学出版社,2002.
