一种用于Buck DC-DC转换器的自适应斜坡补偿电路*
2010-07-02张志勇程卫东
李 帅 ,张志勇 , 赵 武 , 程卫东
(1.西北大学 信息科学与技术学院,陕西 西安710127;2.西安微电子技术研究所,陕西 西安710054)
开关电源的控制模式分为电压控制和电流控制模式,其中,电流控制模式因为其动态响应快、补偿电路简单、增益带宽大、输出电感小、易于均流等优点而被广泛应用。电流控制模式又可分为平均电流控制模式和峰值电流控制模式,当采用峰值电流模式并且占空比大于50%时存在如下问题:次谐波振荡、系统开环不稳定以及由此而引起的抗干扰能力差,特别是当电感中的纹波电流成分很小时,这种情况更为严重。解决上述问题的方法是引入一个斜坡补偿电路。
目前常规的补偿方式有一次线性补偿和分段线性补偿两种。但这两种方式产生的补偿量都相对固定,容易造成过补偿,这将导致系统瞬态响应慢和带载能力低等问题。本文在分析斜坡补偿原理的基础上,设计了一种自适应斜坡补偿电路,其补偿量自动适应系统占空比的变化,消除了过补偿现象及由此引发的不良影响。
1 斜坡补偿原理分析
图1是Buck型DC-DC转化器峰值电流控制原理图。误差比较器(Error AMP)对输出电压采样信号VFB与基准电压Vref的差值进行放大,得到控制信号Ve。在一个开关周期内,VFB的变化很小,因此可以近似认为Ve在一个开关周期内保持不变。Ve与斜坡补偿模块(slop)产生的斜率为k的斜坡电压Vslop相减,产生一个斜率为-k的周期性控制电压V∑。电流采样放大器(I SENS)对开关电流进行采样并放大,得到电流采样信号VS,输入到PWM比较器(PWM CMP)正向端,当电流上升,VS=VΣ时,PWM比较器翻转输出高电平,关断功率管,电感电流线性下降,直到下一个时钟周期到来。可以得出结论:在一个时钟周期内,控制电压VΣ为本周期内的电流设定了最大值。故称为峰值电流控制模式。
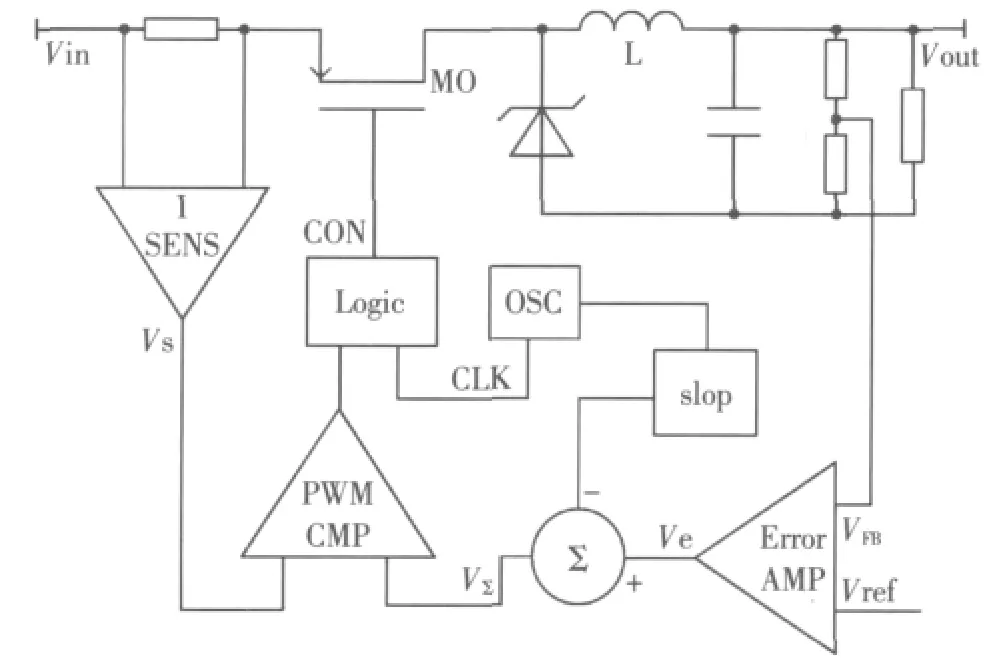
图1 Buck型DC-DC转化器峰值电流控制原理图
1.1 扰动对系统稳定性的影响
图1所示电路在未加斜坡补偿模块时,在占空比D>50%的情况下系统是不能稳定工作的,这种情况可由图2形象地说明。图2中,Ve=VΣ是电压反馈回路的误差放大信号,实线所示波形为电感电流,虚线所示波形为叠加扰动ΔI0后的电感电流,k1、k2分别为电感电流上升和下降的斜率,ΔI1为经过一个周期,由ΔI0引起的电流误差。
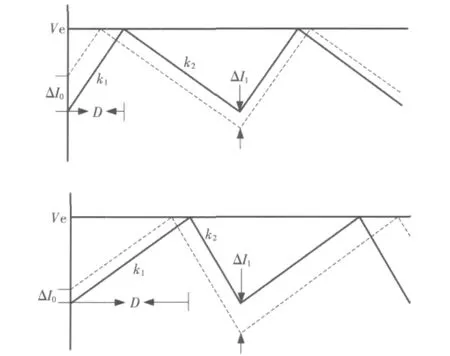
图2 D<50%(上)D>50%(下)扰动对稳定性的影响
由图2可得,没有引入斜坡补偿的情况下,有:

由(1)式可以看出,当占空比 D<50%(|k2|<|k1|)时,电流误差ΔI周期性地减小,系统是稳定的;当占空比D>50%(|k2|>|k1|)时,ΔI周期性地增大,系统是不稳定的。
1.2 固定斜坡补偿
峰值电流控制模式在占空比D>50%的情况下,系统存在不稳定的问题,因此需要引入斜坡补偿。
图3是引入斜率为-k的斜坡信号后扰动对电感电压的影响情况,由图可得:

经过n个周期,电流误差ΔIn为:

由(3)式容易得出,要保持系统稳定,就要满足:

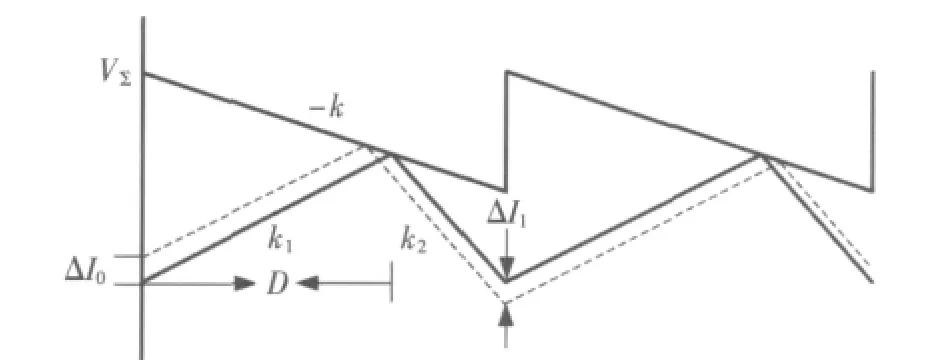
图3 D>50%时引入斜坡补偿后的情况
由图3可以看出:


式(6)即为系统保持稳定所必须满足的条件。由(6)式可知:当 k>-0.5k2时,在 0<D<1 的范围内,式(6)恒成立,即系统始终保持稳定。考虑到补偿余量,一般将k取为 k2的-0.7~-0.8倍。
然而,这种固定斜率的补偿方式在占空比较小的情况下,会产生过补偿现象,过补偿会加剧补偿信号对电感电流限制指标VΣ的影响,从而导致系统的带载能力降低。
1.3 自适应斜坡补偿原理
对于图1所示的Buck型DC-DC转换器,忽略功率管M0的导通压降,有:

其中,L为输出滤波电感值,将(7)、(8)式代入(5)式可得:

将(7)、(8)、(9)式代入(6)式有:

可见,只要斜坡补偿信号的斜率与输入输出电压的关系满足式(10)所示的关系,系统就可以保持稳定。因此,可以根据输入、输出电压的变化采用不同的补偿斜率,即在占空比较小的情况下采用较小的补偿斜率,从而减轻或消除过补偿现象对系统带载能力的影响。
2 自适应斜坡补偿电路分析
本文基于CMOS工艺,设计了一种可以根据输入、输出电压的变化而自动调整补偿信号斜率的自适应斜坡补偿电路,如图4所示。图中M0与R0构成源极跟随器,将M1的栅源电压VGS1偏置在恒定状态,使得流过M1、M2的电流保持恒定;R1与 R2组成分压网络,将 Vout分压后得到 V0;M1与 M2组成 PMOS源极跟随器:V1=V0+|VGS2|,由于流过 M2的电压恒定,所以 VGS2恒定;M3与R3组成源极跟随器:V2=V1-VGS3,由于 R3阻值较大,因此,流过M3的电流I0较小;又因为M3的宽长比较大,所以可认为VGS3是近似恒定的。由以上推论可得:

合理调节相关参数,使得|VGS2|=VGS3,有:V2=V0,由此可得:

由M4、M5组成的电流镜将 I0镜像为 I1,设置 M5与 M4的宽长比为A,可得:

设置M11与M12的宽长比为B,同理可得,流过M11的电流 I2为:

根据 KCL定律,电流 I1和 I2在点 P相减,得到电流 I3,由M8、M9组成的电流镜将 I3镜像为 I4,设置 M9与 M8的宽长比为D,可得:

I4对电容 C进行充电,得到斜坡补偿电压 Vslop,Vslop的斜率k为:

合理设置式(16)中 A、B、C、D的值,即可满足(10)式关于自适应斜坡补偿斜率的要求。
3 仿真验证
基于标准 0.6 μm CMOS工艺模型,运用 Cadence Spectre对图4所示的电路进行仿真验证,结果如图5、图6所示。

图5 Vin不变,斜坡补偿斜率随Vout变化情况

图6 Vout不变,斜坡补偿斜率随Vin变化情况
由图中可以看出,该电路所产生的补偿信号斜率随输出、输入电压差的变化而变化,从而实现了补偿斜坡斜率随占空比的变化而变化的自适应补偿,因此可以消除由于过补偿所引起的带载能力低等缺点。
本文从基本的斜坡补偿原理出发,设计了一种适用于Buck型DC-DC的自适应斜坡补偿电路;利用源极跟随器和电流镜得到与输入输出电压差值成正比的电流,从而建立起占空比和补偿斜率之间的关系,实现了斜坡斜率自适应调节。最后通过了仿真验证。
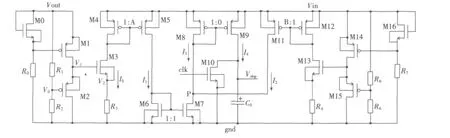
图4 自适应斜坡补偿电路图
[1]陈富吉,来新泉,李玉山.一种自适应斜坡补偿电路的设计与实现.半导体学报,2008,27(3):494.
[2]LAI Xin Quan,ZHOU Li Xia,CHEN Fu Ji.Design of a dynamic slope compensation circuit for boost DC-DC converter.Microelectronics,2005,35(4):420.
[3]PHILLIP E A,DOUGLAS R H.CMOS analog circuit design[M].Second Edition.Beijing:Publishing House of ElectronicsIndustry,2002:167-438.
[4]RAZAVI B.Design of analog CMOS integrated circuits[M].陈贵灿译.西安:西安交通大学出版社,2003:50-63.
[5]LI Yan Ming,LAI Xin Quan,WANG Hong Yi.Design of a self-regulation slop compensation circuit for buck DC-DC converter.Microelectronics&Computer,2005,22(3):274.
[6]PRESSMAN A I.Switching power supply design.Beijing:Publishing House of Electronics Industry,2005:107.
[7]GRAY P R,HURST P J.Analysis and design of analog integrated circuits[M].India,Replike Press,2001:38-72,197-203,407-408.