嵌入式高精度GPS异地时间测量系统的设计
2010-07-02张杨敏谢兴红
张杨敏 ,郭 勇 ,谢兴红
(成都理工大学 信息工程学院,四川 成都610059)
在航天、通信、桥梁隧道、交通、军事等工程应用上,用于统一分隔在视距之外的两地时间信息的异地时间测量得到了广泛应用,通常被用来检测一个信号到达两地点的时间差。由于距离较远,无法使用同一个时钟。若使用传统的无线通信作为触发测量开始的方法,则由于电磁波传播的复杂性而难以达到较高精度。所以需要找到一种实现高精度测量2个不相关时间量的方法。利用GPS实现时间同步具有同步精度相对较高的特点,时间同步精度可以达到ns级,并且不需要发送设备,省去了昂贵的高准确度原子频率基准[1],故成本相对较低。GPS可以在任何时间、地点、天气的情况下接收到GPS信号。因此利用GPS实现时间同步不受地域条件的限制,而且构建同步系统相对简单易行,可靠性较好[2]。
1 系统硬件设计
1.1 系统整体结构
系统设计的最终目的是测量异地时间差Δt,但是由于2个测量点处于异地,不能使用同步测量,所以使用GPS作为同步时间基准,分别测量被测信号1与PPS信号的时间差t1和被测信号2到达测量点2时与PPS信号的时间差t2,通过后期回传数据到计算机进行处理,得到Δt[4-5]。当测量信号到达测量设备1时,CPU保存当前计数器中的值,并进行适当整理,得到当时的绝对时间。同理,当被测信号到达测量设备2时,得到另一个绝对时间。最后将这2个时间信息传回计算机进行后期处理。利用GPS提供的同步时间作为时间基准,无论距离多远,只要能够接收到GPS信号就可以在异地进行测量。
整个测量系统结构如图1所示。各个功能模块实现功能如下:
(1)GPS信号接收模块:接收 GPS信号,产生同步秒脉冲信号以及时间信息。完成与微处理器的通信,报告工作状态,并接收微处理器的控制。
(2)信息存储块模:存储测量的时间信息。受微处理器管理,可以进行存储、读取、删除信息等操作。
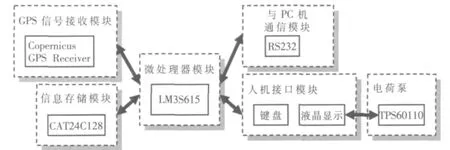
图1 基于GPS异地时间测量系统设计图
(3)人机接口模块:包括显示和键盘输入,采用微处理器控制和监测。
(4)微处理器模块:控制并接收GPS模块产生的秒脉冲和时间信号,监视键盘状态并控制液晶显示相应界面,同时可检测脉冲并记录保存时间等。
(5)与PC机通信接口模块:实现系统与PC机通信功能,接受微处理器控制,主要作用是回传数据到计算机进行后期处理。
1.2 系统主要模块设计
(1)GPS模块。系统选择Trimble公司的Copernicus GPS Receiver作为GPS信号接收模块,如图2所示。使用GPS模块的秒脉冲和时间信号定位,精度要求不高,而为了在户外手持使用,系统主要考虑对于体积和功耗有较高要求的使用需求[6-8]。系统选用的GPS模块面积仅有拇指大小,并且耗电量极低,是使用电池充电功能的手持式产品,设计时间精确度为50 ns,能满足本系统的要求,且价格相对便宜。
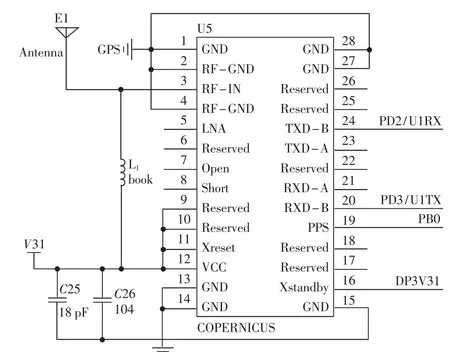
图2 GPS模块
(2)处理器模块。系统选用Luminary的 ARM“群星”系列的LM3S615作为控制及信息处理单元,如图3所示。LM3S615是一款32位处理器,其主要特性为:具有32 KB可编程单周期 Flash、8 KB单周期 SRAM、2个UART、1个硬件 I2C、1个硬件 SSI、3个通用定时器、8通道的10位ADC、模拟比较器、PWM等。采用存储器保护单元(MPU)为受保护的操作系统功能提供了一种特权模式,采用非对齐式的数据访问使数据可以有效地压入内存。处理器支持极细微的位元处理操作,可最大限度地使用内存,并且提供精简的外设控制。
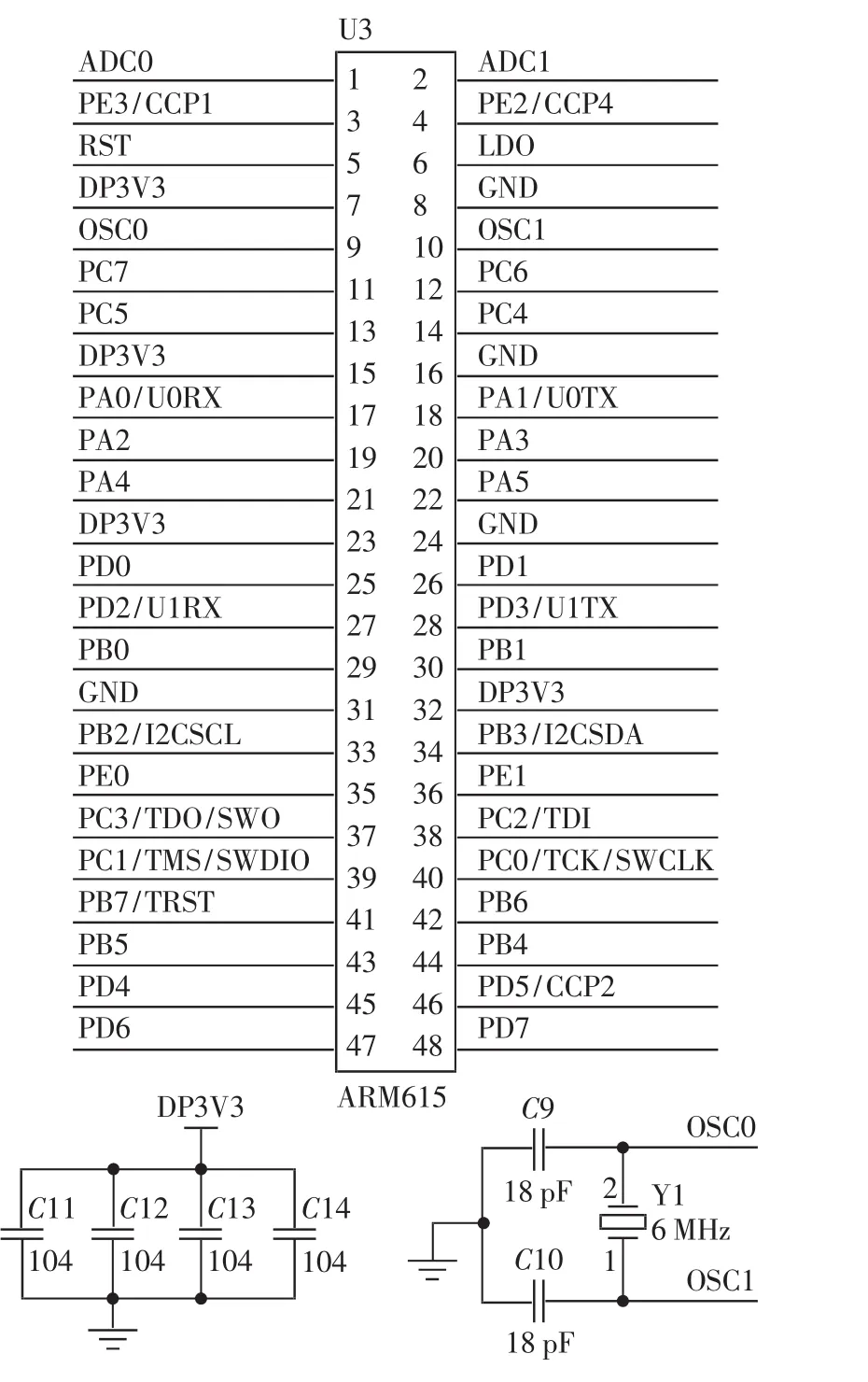
图3 处理器模块
(3)信息存储模块。常用的存储数据的媒介主要有Flash和E2PROM。系统主要存储的是时间信息,数据量不大,对速度的要求也不高,故选用了E2PROM芯片CAT24C128构成信息存储模块,如图4所示。该芯片基于低功耗CMOS技术,容量为128 KB,宽电源电压范围,使用I2C接口,最高速度400 kHz,方便软件控制且节约端口资源。
(4)电荷泵。由于常见的锂离子电池都是3.7 V,而液晶显示模块需要使用+5 V电源,所以需要一个升压电源。从系统的功耗和效率综合考虑,使用电荷泵是一种比较经济的方法,而且效率很高。系统电荷泵模块如图5所示。这里选择德州仪器公司的TPS60110,输入范围2.7 V~5.4 V,持续输出电流达400 mA,工作温度范围-40℃~+85℃,而且纹波电压峰峰值小于10 mV,可以满足GPS系统的供电要求。
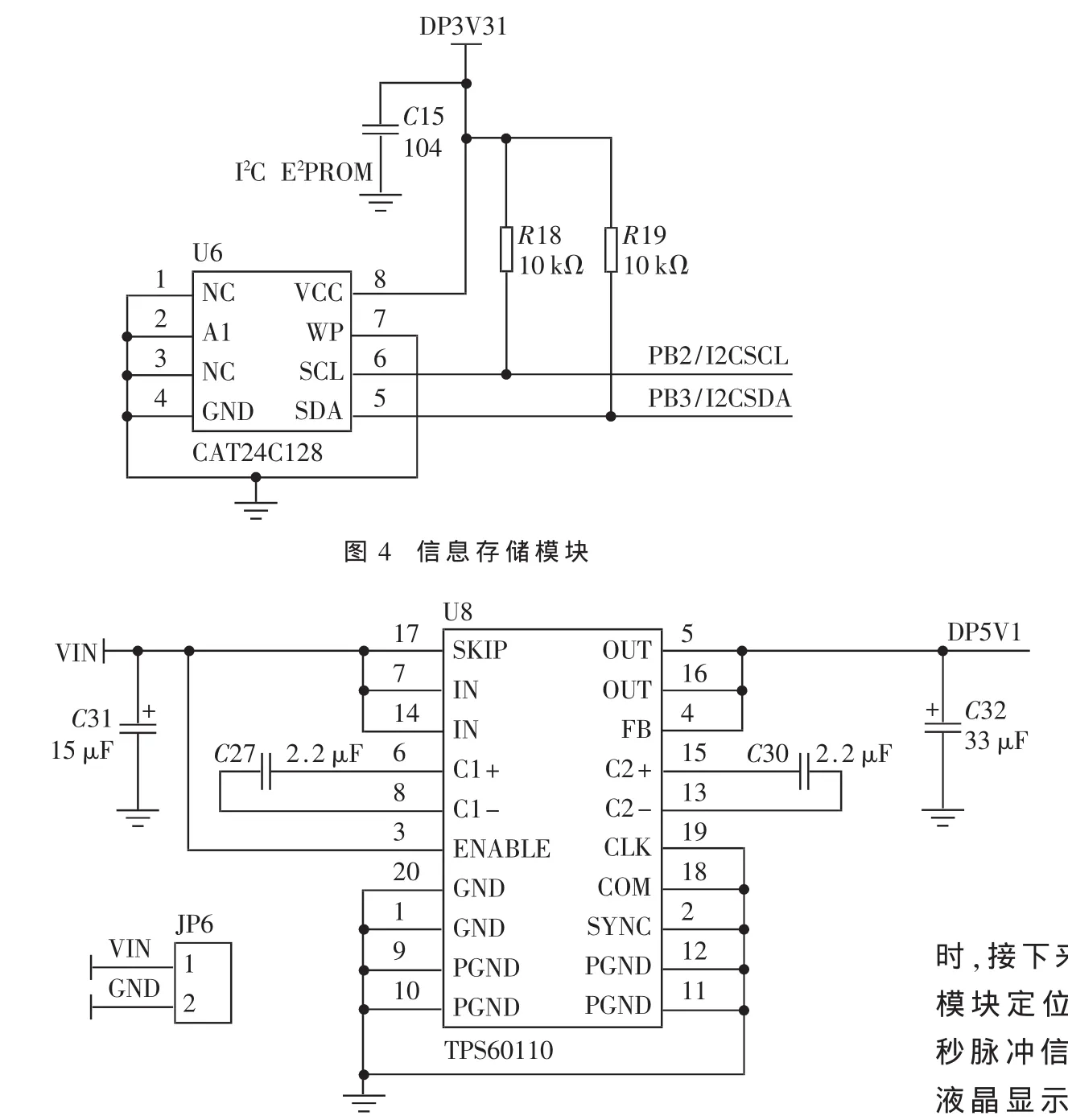
图5 电荷泵
1.3 系统可靠性优化
系统在设计时充分考虑了可靠性优化。系统GPS模块天线部分的频率达到1.5 GHz。良好的布线非常重要,在布线时应充分考虑就近原则及弧形走线原则。在天线走线部分,为了防止PCB板自身的干扰,应用地线进行保护。为了防止其他芯片对MCU电源的影响进而影响MCU的稳定性,系统单独选用了电源芯片从电源的入口处供电。系统中晶体的稳定与否关系到整个系统测量的误差精度,在晶体走线时以考虑就近原则及晶体信号线的保护为主。元件的布局遵照“先大后小,先难后易”的布置原则,先将GPS模块及MCU安放在合适位置,再依照原理图按各个分块电路的外围期间进行布局。为提高IC的可靠性,在IC电源处加去藕电容。去藕电容的布局尽量靠近IC的电源管脚,并与电源和地之间形成最短回路,且布线时电源经过电容再进入IC电源脚。为了防止PCB本身产生干扰,整个系统采用了双面铺地线的方法。
2 系统软件设计
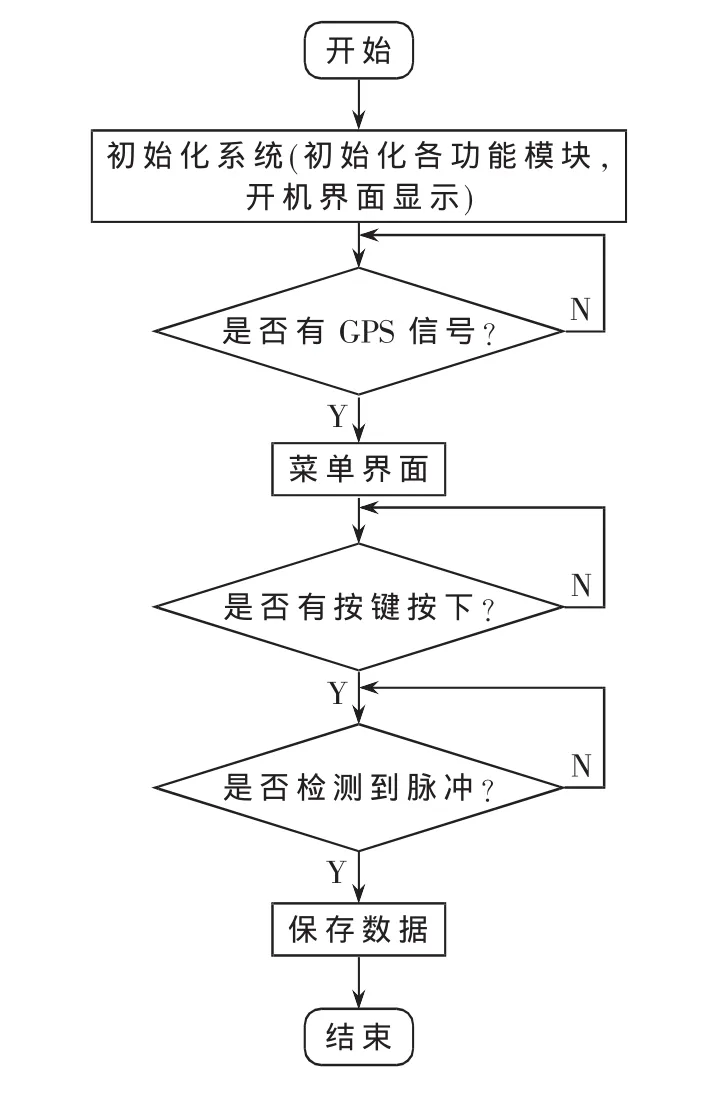
图6 程序流程图
系统主要功能程序流程如图6所示。上电开机时先初始化各功能模块,包括初始化GPS模块,并开始搜索GPS信号。系统以GPS的秒脉冲信号为时间基准,故GPS信号是系统一切操作的前提。只有搜索到GPS信号来测量到的所有数据才能保证其有效性。在GPS之后,将时间信息读入微处理器,并不停检测号,以达到同步效果。同时微处理器通过控制菜单界面,并搭配按键组合成相应的功能,包括是否启动检测信号,读取、保存或删除资料等。
3 系统调试结果及分析
原始数据测试。将设计的2块系统板的测试点直接相连,其中1块产生触发信号,采用安捷伦54622D示波器观察2个测量结果,可以得到在输入信号相同时两系统的固有测量误差的范围。测试数据如表1所示,所有数据单位均为μs。
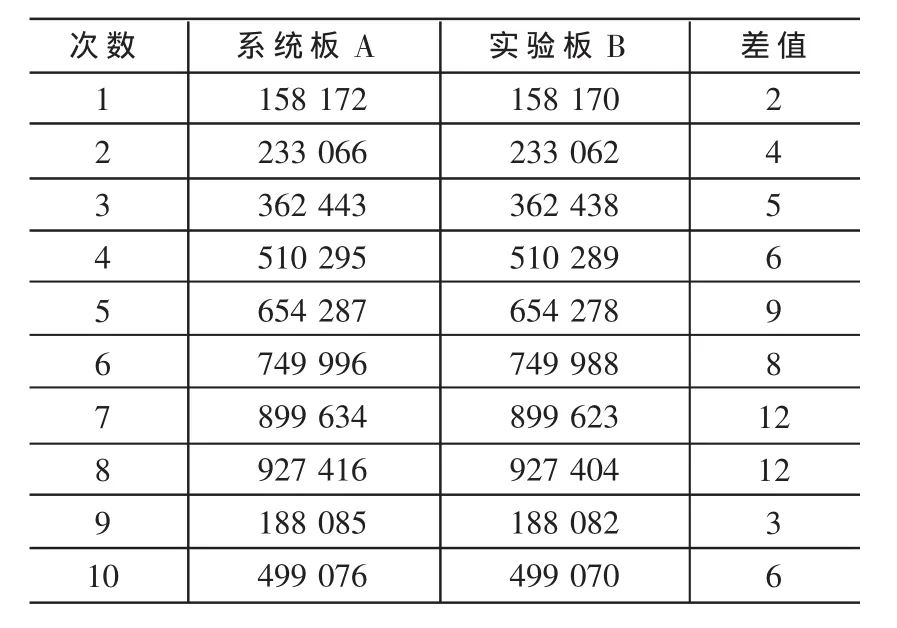
表1 原始测试数据
系统的测量精度不仅和GPS的精度有关,还和微处理器本身的时钟晶体精度有关。系统时钟需要在2个PPS信号之间作为被测信号的参考,即最差的情况下,晶振需要在1 s时间内作为测量基准。故此测量方式由于晶振引入的累积误差最大应在1 μs左右。另一方面,由于误差的累积与信号达到测量点的时间有关,即累积时间越长,误差越大。如果忽略短期(1 s)内晶振的频率漂移问题,则由于晶振时钟和标准时钟的差别是可以测量的,所以累积误差的大小也是可以推测的。由此,可以考虑使用软件对累积误差进行某种程度的校正,以提高测试精度。
表1的测试结果还可以看出,累积时长和误差的大小也存在比较明显的关系。如果能得到此关系,则可以使用软件校正消除此误差的绝大部分。假设此误差的增长和内部基准维持的时间是正比关系,对测试结果使用软件修正,得知系统最终的精度应该在1 μs~2 μs之间。使用系统板定时产生2个相差一定时间的脉冲信号,分别测量这2个信号到达2个测量点的时间,得到其时间差,观察此数据的变化,由定时程序得到理论定时值为1 280 μs。由于程序使用C语言编写,定时长度具有一定误差,此定时的实际精度应该在 1 283 μs左右,最终的测量误差同样不超过 2 μs,因此2 μs的测试精度是有保证的。
系统的精度关键在于GPS秒脉冲的精度和系统时钟精度。前面已经知道,测量精度和晶振累计时间长度有关,计数累计时间越长,误差越大。由此可以推断,晶体的本身特性对于系统测量的误差有较大影响。从另一方面来讲,软件校正是基于大量统计数据,而不同的晶振显然需要不同的校正数据,还需要在不同温度条件下分别测试,其工作量很大且没有可移植性,因此也需要找到能够最大限度决定精度的器件对其做出修改。使用更高精度有源晶体,系统的测试精度将会有极大提高。
系统经过2步优化后的测试结果如表2所示,所有数据单位均为μs。可以看到,优化后的系统精度和稳定性比优化前有了较大提高。
利用嵌入式系统实现GPS异地时间测量,具有出色的性能和较高的稳定性,使用软件校正的方法可以减小一定程度的累计误差,并结合晶振同步的方法,进一步减小了测量误差,有效保证了GPS异地时间测量系统的高精度,最终误差控制在3 μs之内。
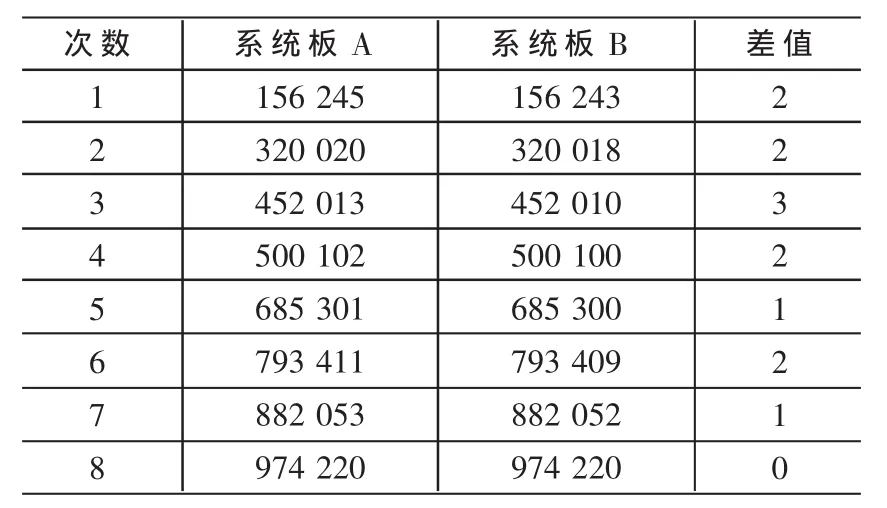
表2 优化后测试结果
[1]刘金铭,翟造成.现代计时学概述—原子频标及其应用[M].上海:上海科学技术文献出版社,1998:37-38.
[2]童宝润.时间统一系统[M].北京:国防工业出版社,2003:20-21,265.
[3]Luminary Mico LTD.LM3S615 Data Sheet[EB/OL].2004.http://www.zlgmcu.com.
[4]时统设备通用规范(GJB2242-98)[S].国防科工委军标出版社发行部,1995.
[5]周东明,刘烈昭.多基地雷达同步系统[J].航天电子对抗,2004(2):46-49.
[6]BULLOCK J B,KING T M.Test results and analysis of a low cost core GPS receiver for time transfer application[A].Proceedings of IEEE International Symposium on Frequency Control[C].1997:314-322.
[7]KOPPANG P,WHEELER P.Working applition of TWSTT for high precision remote synchronization[A].Proceedings of the IEEE International Symposium on Frequency Control[C],1998:273-277.
[8]ALLAN D W,WEISS M A.Accurate time and frequency transfer during common-view of a GPS satellite[A].Proceedings of the IEEE International Symposium on Frequency Control[C],2003:334-346.