一种基于“极幅调制”原理的无刷双馈电机绕线转子排布方法
2010-07-02张经纬王雪帆
张经纬,王雪帆
(华中科技大学电气与电子工程学院,武汉 430074)
引言
无刷双馈电机(Brushless Doubly-Fed Machine,BDFM)是近年来电机领域研究的一个热点,它最早由Hunt提出,经过 Broadway等人的改进,形成了比较经典的特殊笼型转子结构,一直沿用至今[1−2]。上世纪八十年代中期以来,随着世界各国对风能等绿色能源开发的日益重视,美国Oregon州立大学、英国剑桥大学、国内沈阳工业大学等众多高校和研究机构对无刷双馈电机的运行理论和控制方法等展开了深入的研究,取得了很多理论成果[3−6],但是由于存在一些转子谐波含量大,电机效率低,体积较大等问题,该电机尚未进入工业应用。不过,国内外的研究者一致认为该电机在变速驱动(ASD)和变速恒频发电(VSG)领域有很好的应用前景。
无刷双馈电机的结构示意图如图1所示,它的定子上具有极对数不同的两套绕组,分别称为功率绕组和控制绕组,极对数分别为p1和p2。运行时,功率绕组接工频电源,控制绕组通过双向变频器接到工频电源。
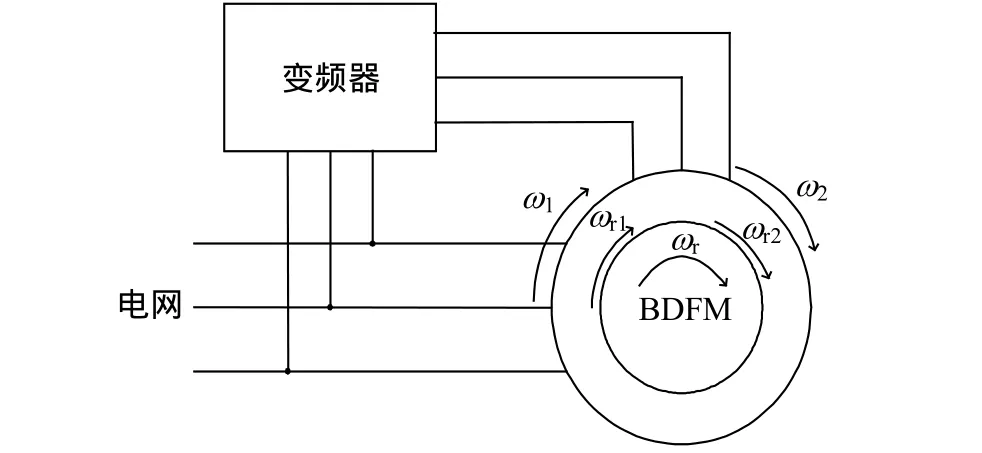
图1 无刷双馈电机的结构示意图
传统的无刷双馈电机采用的是类似于图2所示的特殊笼型转子,它由若干个所谓的“巢”组成,每个“巢”由数个短路的同心导条构成,其“巢”数等于两种极对数之和。特殊笼型转子虽然结构简单,但是难以做到对两种极对数都有高的绕组系数,并且谐波含量少。相对而言,绕线转子接线灵活,可以通过不等匝、不等节距、舍弃槽号等方法来实现对两种极对数都有高的绕组系数而且谐波含量低[7],因此绕线转子有望取代特殊笼型转子,率先进入工业应用。

图2 72槽8/4极的一种特殊笼型转子结构(仅用36槽)
根据无刷双馈电机的同步运行原理[4],转子运行时一种频率的电流能产生两种反向的旋转磁场,分别与功率绕组和控制绕组耦合,也即要求转子绕组的排布对两种极对数相序相反,而且绕组系数都较高。根据这一要求,本文提出了一种基于“极幅调制”原理[8]的绕线转子的排布方法,该方法可以借鉴交流绕组的变极理论,并通过“对称轴线法”[8]来具体实现,具有概念清晰,简单灵活的优点。文中还给出了一种72槽8/4极的设计步骤和方案。
1 基于“极幅调制”原理的设计方法


(2)将变前极按照60°相带所划分的槽号列写于变后极p1的槽号相位图下面;
(3)将上述三相槽号在变后极的槽号相位图上依次取120°的对称轴,分别标注为A、B、C三相,将每相对称轴的前后两个半相分别标注为 A1、A2、B1、B2、C1、C2;
(4)如果每个半相的相带比较窄,比如不超过120°,则所得的转子绕组排布方案为 A:A1,−A2;B:B1,−B2;C:C1,−C2。如果每个半相的相带比较宽,比如超过120°,则利用非正规绕组排布的普遍方法[9]对A、B、C三相槽号重新调整,得到新的半相A1′、A2′、B1′、B2′、C1′、C2′,则所得的转子绕组排布方案为 A:A1′,−A2′;B:B1′,−B2′;C:C1′,−C2′;
(5)将所得的绕组方案按照p1和p2重新排布,根据要求适当舍弃一些槽号以增强p2对极的绕组系数,削弱其他谐波。
值得注意的是,上述第4步和第5步是灵活多变的。第4步能实现变前极p0和变后极p1的相带均不超过 120°,这能保证整个变极过程存在着较强的调制作用,但变极后p2的绕组系数往往不是很高。第5步是为了进一步提高p2的绕组系数而进行调整。
2 72槽8/4极的设计方案
按照上述结论,选择变前极p0=1,变后极p1=4,将变前极按照 60°相带所划分的槽号列写于变后极的槽号相位图下面,如图3所示。将三相槽号按照互差120°依次取三根对称轴,将三相槽号划分为A1、A2 B1、B2、C1、C2六个半相。从图中可见任一个半相都分布在180°的区间上。为了提高反向法变极以后p1的绕组系数,按照文献[9]提供的方法对三相槽号进行调整,得到新的半相划分:
A1′:1 2 3 4 5 6 19 20 21 −46 −47 −48
A2′:10 11 12 −40 −41 −42 −55 −56 −57 −37 −38−39
B1′:25 26 27 28 29 30 43 44 45 −70 −71 −72
B2′:34 35 36 −64 −65 −66 −7 −8 −9 −61 −62 −63
C1′:49 50 51 52 53 54 67 68 69 −22 −23 −24
C2′:58 59 60 −16 −17 −18 −31 −32 −33 −13 −14−15
上述划分可以保证每一个半相对变前极和变后极的相带均不超过120°,这样即使在第5步中舍弃部分槽号也能保证对变后极其分布系数大于 0.83。根据以上的相带划分,绕线转子的排布方案初选为:A:A1′,−A2′;B:B1′,−B2′;C:C1′,−C2′。该方案的谐波分析结果见表1中的方案1,其中kq和kw分别表示分布系数和绕组系数(以8极为基波,节距取为10)。可见4极的分布系数较低,为了提高4极的分布系数,需要舍弃部分槽号。现将初选方案的槽号列写于4极的槽号相位图下,如图4所示。舍弃不同的槽号可以得到多种不同的方案,部分方案的谐波分析结果见表1,其中仅列出了所有磁动势百分比大于 5%的谐波,“+”表示正转,“−”表示反转。

图3 2极按60°相带所划分的槽号在8极下的槽号相位图
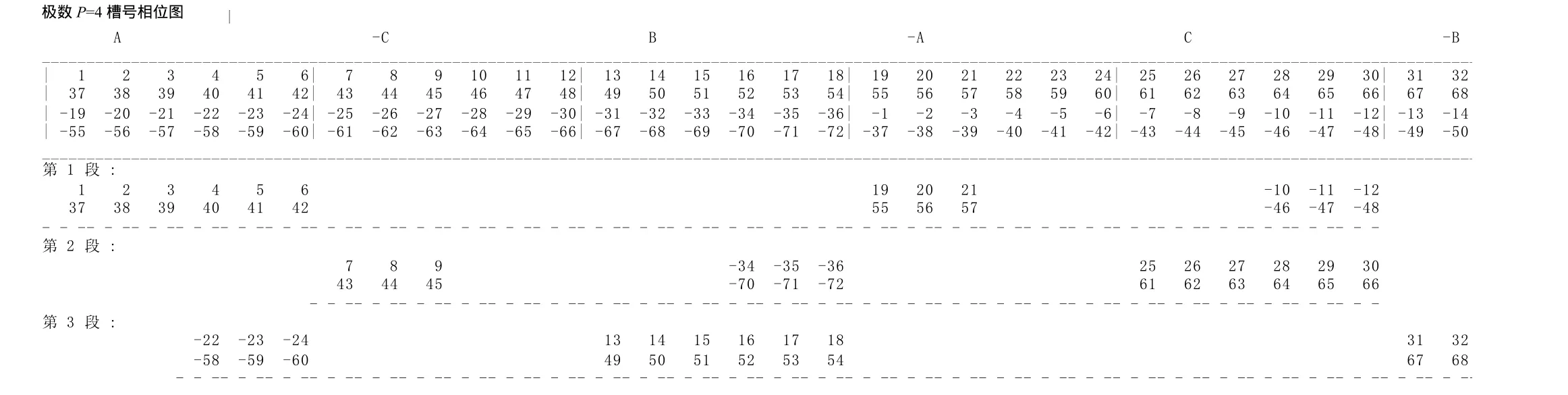
图4 初选方案在4极下的槽号相位图
对比表1可见,从减小谐波和提高空间利用率的角度,方案3是个比较合理的方案,已经具有一定的实用价值。其绕组排布方案如图5所示。作为对比,如果采用如图2所示的特殊笼型转子结构,在只使用36个槽的情况下,特殊笼型转子的谐波分析结果见表1的方案5,与方案3比起来,虽然8极的绕组系数较高,但是谐波含量很大,此外空间利用率也不及方案3,因此方案3更具有优势。

图5 方案3的接线图

表1 部分方案和其谐波分析结果
3 结论
本文提出了一种基于“极幅调制”原理的无刷双馈电机绕线转子排布方法,该方法可以通过交流绕组变极理论中的“对称轴线法”来具体实现,具有概念清晰,操作性强的特点。此外,虽然设计的基本步骤相同,但是不同的取舍标准可以得到不同的方案,需要反复取舍和对比才能得到比较优化的方案。该方法也有其局限性,首先该方法设计的绕组方案仍然基于正规的Y或者Δ接法,从原理上说,仍然是保留两种极对数下感应电势同相的槽号,去掉反向的槽号,因此对于某些极对数的配合,比如极对数之比为2:1的情况,难以做到对两种极对数的绕组系数都很高,必须舍弃部分槽号,造成空间利用率降低。其次如果p1和p2之和不是偶数,那么无法选择基波p0和调制波pm,该方法即失效。虽然如此,在大多数情况下,这一方法仍然能为无刷双馈电机的绕线转子设计提供指导意义。
[1]Hunt L J.A new type of induction motor[J].Journal IEE(London), 1907, 39: 648-667.
[2]Broadway A R, and Burbidge L.Self-cascaded machine: a low speed motor or high frequency brushless alternator[J].Proc.IEE(London), 1970,117(4): 1277-1290.
[3]Wallace A K,Spee R, Alexander C G.The brushless doubly-fed machine: the advantage, application and design methods[C].Sixth Inter- national Conference on Electrical Machines and Drive, Oxford, England,1993.
[4]Li R, Spee R, Wallace A K, Alexander G C.Synchronous drive performance of brushless doubly- fed motors[J].IEEE Transactions on Industry Applications, 1994, 30(4): 963-970.
[5]Roberts P C, McMahon R A, Tavner P J, et al.Equivalent circuit for the brushless doubly fed machine(BDFM)including parameter estimation and experimental verification[J]. IEE Proceedings-Electric Power Applications, 2005,152(4): 933-942.
[6]张凤阁, 王凤翔, 王正.不同转子结构无刷双馈电机稳定运行特性的对比研究实验[J].中国电机工程学报, 2002, 22(4): 52-55.
[7]王雪帆.一种转子绕组采用变极法设计的新型无刷双馈电机[J].中国电机工程学报, 2003, 23(6):108-127.
[8]许实章.交流电机的绕组理论[M].北京: 机械工业出版社, 1985.
[9]王雪帆, 许实章.变后极为 3倍数时的反向法变极非正规绕组的排列[J].中国电机工程学报,1989, 9(4): 66-72.
