并网逆变器LCL接口直接输出电流控制建模及稳定性分析
2010-06-30郭小强邬伟扬顾和荣王立乔赵清林
郭小强 邬伟扬 顾和荣 王立乔 赵清林
(燕山大学电气工程学院电力电子节能与传动控制河北省重点实验室 秦皇岛 066004)
1 引言
基于风能、太阳能等可再生能源的分布式发电(Distributed Generation,DG)是国家节能减排、可持续发展战略规划的重要组成部分。DG输出的电能质量很大程度上取决于并网接口类型及其控制性能[1]。小功率 DG通常采用逆变器输出加电感 L滤波作为并网接口[2]。然而,大功率 DG通常采用逆变器输出加LCL滤波作为并网接口,其主要原因是大功率逆变器开关频率一般较低,要滤除开关频率及其整数倍附近的谐波,采用单电感滤波方式(-20dB衰减)则需要较大的电感,成本高、体积大,且系统动态性能差。而采用 LCL滤波方式(-60dB衰减)可以选取较小的电感实现同样的滤波效果,且系统动态性能好[3]。
传统的电流控制一般分为两类:间接电流控制和直接电流控制。间接电流控制[4]通过调整电压幅值相位间接控制电流,无需电流反馈控制,控制简单;但动态响应较慢,且控制性能受系统参数影响较大。该问题可通过增加外环控制加以改善,同时保证电压处于可控状态,其典型应用为具有并网和独立运行平滑切换功能的逆变器控制[5]。直接电流控制通过电流反馈闭环控制直接调节电流,具有动态响应快、受系统参数影响小等特点,是目前常用的电流控制方案[6]。
并网逆变器 LCL接口直接电流控制可分为两类:网侧电感电流控制 GSCC(Grid Side Current Control)和逆变器侧电感电流控制 ISCC(Inverter Side Current Control)。由于电网容量较大,网侧电压基本不变,因此并网逆变器输出的电能质量主要由网侧电感电流决定。无论是 GSCC还是 ISCC,其最终控制目标仍为GSCC。
文献[7]中LCL接口直接电流控制采用ISCC方案并取得了较为满意的效果。其最大不足是LCL滤波器中电容值选取受限制,电容越大,并网功率因数越低,控制性能越不理想,因此其电容取值很小。然而,若实现同样的滤波效果,小电容值意味着大电感,从而导致系统动态性能变差,电感基波压降增加。为了解决该问题,文献[8]采用ISCC方案间接实现 GSCC,其特点为电流单环控制且系统稳定性较好。由于其 ISCC参考值由网侧电流参考值和LCL滤波器参数决定,因此该方案控制性能受LCL参数估计精度影响。上述两种方案本质均为网侧电流间接控制,其存在问题可以通过GSCC多环控制方案解决[9-11]。然而,多环控制所需传感器较多导致系统成本增加,且多环控制设计较为复杂,设计不当容易导致系统不稳定。因此,在以低成本和高可靠性为首要目标的大功率系统实际工程应用中GSCC多环控制方案未得到广泛应用。
本文研究内容为并网逆变器 LCL接口直接输出电流控制,即GSCC单环控制方案。然而,采用常规PID进行GSCC单环控制存在不稳定的现象。本文通过 Routh-Hurwitz稳定判据深入分析了不稳定现象的本质,给出了三种提高系统稳定性的无源阻尼PD(Passive Damping)方案,并对三种方案进行了量化分析和比较,最后得出重要结论并通过仿真验证。此外,PD方案存在增加系统损耗的问题可以通过AD(Active Damping)等复杂单环控制或多环控制方案解决,不在本文研究内容范围之内,其内容可参考文献[12-13]。
2 系统建模及稳定性分析
图1为三相并网逆变器原理图。其中,直流母线电压 Udc由再生能源提供,Udc逆变经 LCL滤波接至电网UG,通过调节输出电流IL2实现并网发电。图中L1为逆变器侧电感,L2为网侧电感。

图1 三相并网逆变器原理图Fig.1 Schematic of three-phase grid-connected inverters
忽略直流母线电压波动、开关死区等因素影响,当开关频率fs≫50Hz且逆变器PWM工作在线性调制区时,图1中的非线性控制系统可以等效为图2a中的线性系统[10]。根据图2a可知
根据线性系统叠加定理,分别考虑Uin(s)和UG(s)对输出电流IL2(s)的影响,式(1)~式(3)联立得

将式(4)、式(5)代入图2a可得系统简化模型如图2b所示,可以看出LCL滤波器为三阶谐振系统,其谐振频率为

根据图 2b可得并网逆变器直接输出电流控制传递函数为

其中

将C( s)= kp代入式(7)得P控制系统特征方程

同理,将 C ( s)= kp+ ki/s 和 C ( s)= kp+ ki/ s + kds 代入式(7)可得PI和PID控制系统特征方程分别为

根据 Routh-Hurwitz稳定判据[17],三阶系统稳定的充分必要条件为

四阶系统稳定的充分必要条件为

表1列出系统特征方程系数,可以看出,由于a1=0使得P、PI和PID三种控制参数无论取任何正值,均不满足 a1a2-a0a3>0稳定条件。因此可以得出结论:并网逆变器LCL接口直接输出电流控制无论采用P、PI还是PID控制,系统均不稳定。

表1 系统特征方程系数Tab.1 Characteristic equation coefficients
3 无源阻尼PD方案分析
并网逆变器 LCL接口直接输出电流控制稳定性问题简单直接的解决方案是 LCL串联电阻形成无源阻尼 PD衰减谐振峰值,增大相角裕度,提高系统稳定性[7]。如图3a所示,电阻有三种可能的串联位置,下面分析三种情况下系统稳定性问题。
根据图 3b简化模型可得并网逆变器直接输出电流控制传递函数如式(13)所示。为了便于分析,本文只考虑P控制C(s)=kp,此时系统特征方程为式(14)~式(16)。表2给出系统稳定性分析相关数据。

图2 线性控制模型Fig.2 System linear control model

图3 无源阻尼的线性控制模型Fig.3 System linear control model with passive damping


其中
L1串联R1

L2串联R2

C串联R


表2 系统稳定性分析数据Tab.2 System stability analysis data
从表2中可以得出四点结论:
(1)电感 L1=L2且 R1=R2时,L1、L2串联电阻后稳定范围相同,即改善系统稳定性的效果相同。
(2)串联电阻越小,系统越不稳定。从串联电阻的临界值 Rmin考虑,电容串联方案所需电阻最小。
(3)串联电阻 R1=R2=R时,电容串联方案系统稳定范围最大,即改善系统稳定性效果最好。
(4)比例系数 kp越大系统越不稳定。从比例系数的临界值kpm考虑,电容串联方案kpm最大。
4 仿真验证
本文利用 Matlab对上述理论分析和结论进行验证。系统参数见表3。
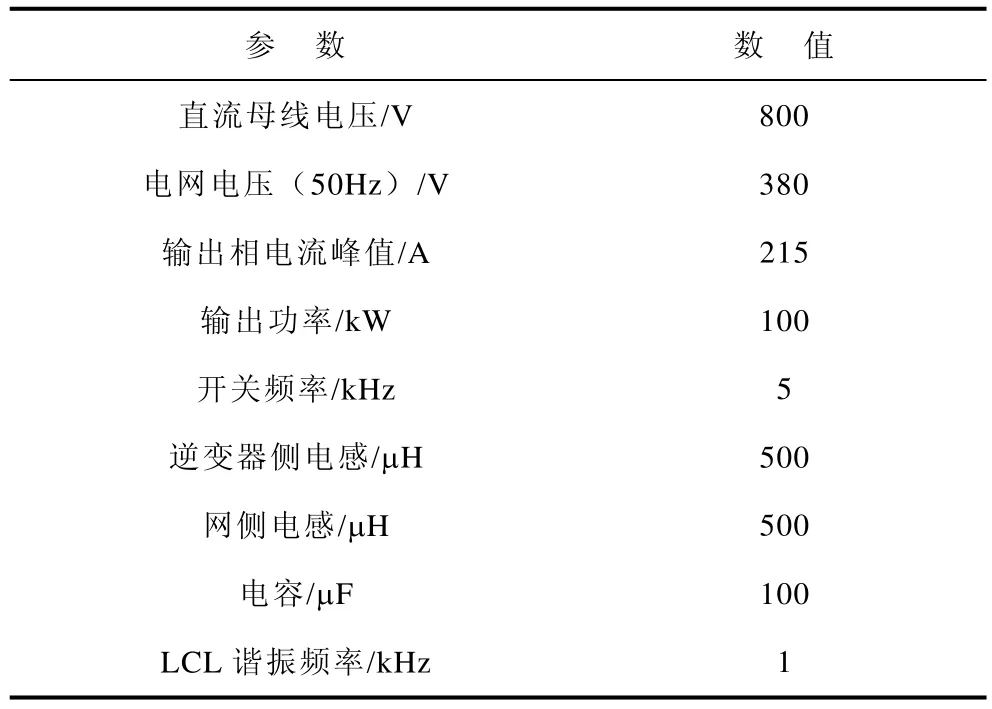
表3 系统参数Tab.3 System parameters
4.1 结论(1)、(2)验证
设置比例系数kp=0.005,表4给出对应的串联电阻临界值及理论分析相关数据。
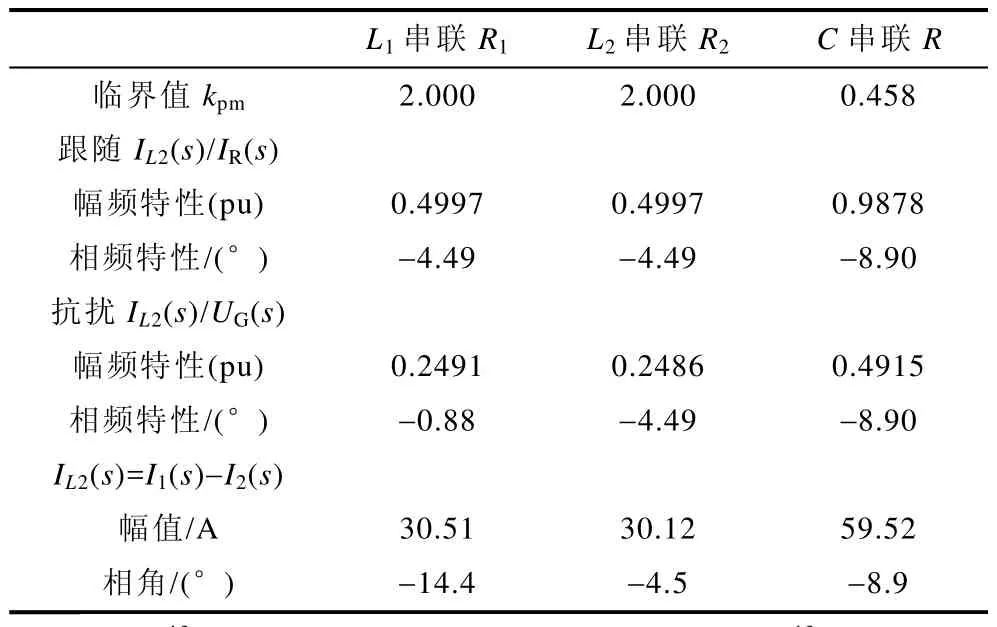
表4 理论分析数据Tab.4 Theretical analysis data
由图 4仿真结果可以看出:①电感 L1=L2且R1=R2时,L1、L2串联电阻后稳定趋势相同,即改善系统稳定性的效果相同。此外,系统输出电流控制存在较大幅值误差和相位误差,其根本原因在于比例系数太小。若要增大比例系数,则必须相应增大串联电阻以保证系统稳定。②三种情况下,串联电阻 RD=Rmin时系统处于临界稳定状态,并网逆变器输出电流中存在振荡,振荡频率由闭环共轭极点虚部决定。RD>Rmin时系统稳定,RD<Rmin系统不稳定,验证了理论分析所得结论的量化精确度。当比例系数一定时,三种情况中电容串联方案电阻临界值Rmin最小。
4.2 结论(3)、(4)验证
设置串联电阻R1=R2=R=1.5Ω,表5给出比例系数临界值及相关数据。
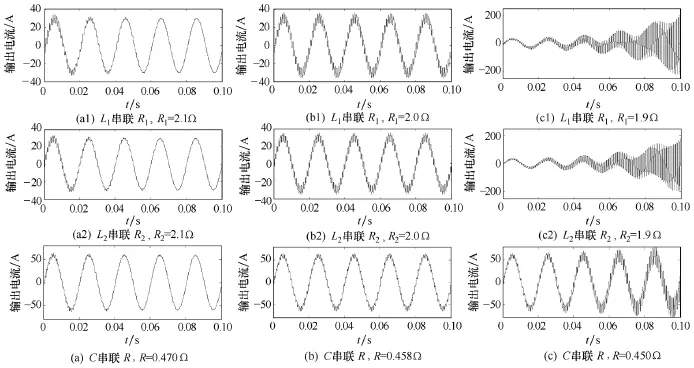
图4 仿真结果Fig.4 Simulation results
由图5仿真结果所示,可以看出三种情况下,比例系数kp越大系统越不稳定。比例系数kp=kpm时系统处于临界稳定状态,逆变器输出电流中存在振荡,振荡频率由闭环共轭极点虚部决定。kp<kpm时系统稳定,kp>kpm系统不稳定,验证了理论分析所得结论的量化精确度。当串联电阻一定(RD=1.5Ω)时,三种情况中电容串联方案比例系数临界值 kpm最大,即kp调整范围最大。
由上文理论分析和图 4、图 5中的仿真结果可以得出结论:三种方案中,电容串联电阻方案最优。

表5 理论分析数据Tab.5 Theretical analysis data

图5 仿真结果Fig.5 Simulation result
4.3 非线性系统控制结论验证
上述理论分析和仿真结果均建立在系统线性化模型基础之上,未考虑系统非线性因素如死区、系统控制延时、开关动作和系统饱和问题。实际应用中,死区可通过适当控制加以补偿,系统延时可通过超前补偿消除其影响[14]。而开关器件的PWM为非连续调节,开关频率越低,调节速度越慢,电流误差(纹波)越大,经过调节器后越容易引起过调制,从而导致系统饱和。一般来说,开关频率越高,实际非线性系统与其线性化模型越接近,上述结论和数据量化分析越精确。但是,当系统过调制导致饱和时,上述结论将不再成立。
为了验证非线性系统情况下结论的正确性,本文以电容串联电阻方案为例建立了 Matlab非线性仿真电路。系统参数见表 3,工程应用中一般设计电容串联电阻值为谐振点容抗的 1/3[11],即R = 1 /(3× 2π frC)= 0 .53Ω 。串联电阻确定后,根据表2可得比例系数临界值kpm=0.006。线性系统和非线性系统仿真结果如图6所示。

图6 仿真结果Fig.6 Simulation result
由图6仿真结果可以看出,当逆变器开关频率fs≫ 5 0Hz且系统工作于线性调制区时,非线性系统和线性模型的仿真结果基本一致,说明上文理论分析结论在此情况下仍然适用。由于开关器件 PWM为非连续调节,开关频率较低,调节速度较慢,因此非线性系统仿真结果中的电流纹波较大。然而,当系统工作于过调制区时,非线性系统和线性模型的仿真结果相差较大。其原因在于逆变器系统工作于过调制区时占空比达到饱和(1pu),这意味着闭环调节不起作用,系统工作于开环状态。闭环和开环状态下的系统极点分布如图7所示。可以看出,与闭环极点相比,开环极点向左半平面移动,稳定裕度增加,限制了系统振荡放大趋势。正因为系统在线性调制区(闭环)和过调制区(开环)之间的频繁切换使得系统处于一种振荡状态。注意,当串联电阻取值接近0时,开环极点虽然与闭环极点相比向左半平面移动,但稳定裕度太低。此时由于稳定裕度太小,即使系统在闭环、开环两种工作状态之间频繁切换,系统仍然不稳定。

图7 闭环和开环控制分析Fig.7 Analysis of closed-loop and open-loop control
4.4 零稳态误差电流控制和无源阻尼损耗量化
由上文分析可知,并网逆变器输出电流采用比例控制存在较大误差,为了消除电流控制的稳态误差,可在比例调节的基础上增加基于内模原理的通用积分器[14],此时系统调节器传递函数为

加入通用积分器后,系统特征方程阶数由三阶增加为五阶,根据 Routh-Hurwitz稳定判据可知,特征方程阶数越高,约束条件越严格,稳定裕度越小。以电容串联电阻方案R=1.5Ω为例进行分析,根据表2可知比例系数临界值为0.15。为了避免系统PWM 出现过调制,同时保证系统具有足够的稳定裕度,电流调节器系数取 kp=0.05,ki=10,仿真结果如图8所示。由仿真结果可知系统工作在线性调制区,输出电流为215sin(314t),实现了零稳态误差控制,电阻消耗功率450W,功率损失0.45%,基本满足实际工程需要。
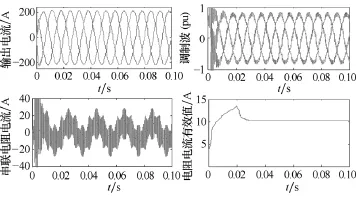
图8 仿真结果Fig.8 Simulation results
5 结论
本文主要研究了以下内容:
(1)并网逆变器 LCL接口直接输出电流 PID控制建模及稳定性分析。
(2)基于无源阻尼的并网逆变器LCL接口直接输出电流P控制建模及稳定性的精确量化分析。
(3)基于电容串联阻尼方案的并网逆变器LCL接口直接输出电流零稳态误差控制设计及无源阻尼损耗量化分析。
通过理论分析和仿真验证,得出以下结论:
(1)并网逆变器 LCL接口直接输出电流控制无论采用P、PI还是PID控制,系统均不稳定。
(2)串联电阻越小,系统越不稳定。在比例系数相同条件下,从串联电阻的临界值考虑,电容串联方案所需电阻最小,而电感串联方案所需电阻较大。在实际应用中,开关器件通态电阻和电感等效串联电阻一般很小,因此对系统稳定性贡献不大。
(3)比例系数越大系统越不稳定。在串联电阻相同条件下,从比例系数的临界值考虑,电容串联方案最大,即电容串联方案比例系数调整范围最大。
(4)实际工程应用中常采用增大比例系数的方法改善系统控制的跟随特性和抗扰特性,但在调试过程中常出现增大比例系数而导致系统不稳定的现象,此时可通过增大串联电阻提高比例系数调整范围,而不影响系统的稳定性(注意比例系数调整范围应保证系统工作在线性调制区)。
(5)在比例调节基础上增加其他控制器时应注意系统阶数变化对稳定性的影响,应根据比例调节情况下设计的参数进行适当修改,保证系统具有足够的稳定裕度。
本文理论分析及结论将为大功率并网逆变器LCL接口直接输出电流控制实际工程应用提供重要的理论基础和设计依据。
[1]Frede Blaabjerg, Zhe Chen, Soeren Baekhoej Kjaer.Power electronics as efficient interface in dispersed power generation systems[J]. IEEE Transactions on Power Electronics, 2004, 19(5): 1184-1194.
[2]Xue Y, Chang L, Kjaer S B, et al. Topologies of single-phase inverters for small distributed power generators: an overview[J]. IEEE Transactions on Power Electronics, 2004, 19(5): 1305-1314.
[3]Bruno Bolsens, Karel Brabandere, Jeroen Keybus, et al. Model-based generation of low distortion currents in grid-coupled PWM-inverters using an LCL output filter[J]. IEEE Transactions on Power Electronics,2006, 21(4): 1032-1040.
[4]Dixon J W, Ooi B T. Indirect current control of a unity power factor sinusoidal current boost type threephase rectifier[J]. IEEE Transactions on Industry Electronics, 1988, 35(4): 508-515.
[5]Hyosung Kim, Taesik Yu, Sewan Choi. Indirect current control algorithm for utility interactive inverters in distributed generation systems[J]. IEEE Transactions on Power Electronics, 2008, 23(3): 1342-1347.
[6]Kazmierkowski M P, Malesani L. Current control techniques for three-phase voltage-source PWM converters: a survey[J]. IEEE Transactions on Industry Electronics, 1998, 45(5): 691-703.
[7]Marco Liserre, Frede Blaabjerg, Steffan Hansen.Design and control of an LCL-filter-based three-phase active rectifier[J]. IEEE Transactions on Industry Applications, 2005, 41(5): 1281-1291.
[8]Tusitha Abeyasekera, Johnson C Mark, Atkinson David J. Suppression of line voltage related distortion in current controlled grid connected inverters[J].IEEE Transactions on Power Electronics, 2005, 20(6):1393-1401.
[9]Prodanovic M, Green T C. Control and filter design of three phase inverters for high power quality grid connection[J]. IEEE Transactions on Power Electronics,2003, 18(1): 373-380.
[10]Erika Twining, Donald Grahame Holmes. Grid current regulation of a three-phase voltage source inverter with an LCL input filter[J]. IEEE Transactions on Power Electronics, 2003, 18(3): 888-895.
[11]陈瑶, 金新民, 童亦斌. 三相电压型 PWM 整流器网侧 LCL 滤波器[J]. 电工技术学报, 2007, 22(9):124-129.Chen Yao, Jin Xinmin, Tong Yibin. Grid-side LCL-filter of three-phase voltage source PWM rectifier[J]. Transactions of China Electrotechnical Society, 2007, 22(9): 124-129.
[12]张宪平, 林资旭, 李亚西, 等. LCL滤波的PWM整流器新型控制策略[J]. 电工技术学报, 2007, 22(2):74-77.Zhang Xianping, Lin Zixu, Li Yaxi, et al. A novel control strategy for PWM rectifier with LCL filter[J].Transactions of China Electrotechnical Society, 2007,22(2): 74-77.
[13]Wiseman Jason, Wu Bin. Active damping control of a high-power PWM current-source rectifier for line-current THD reduction[J]. IEEE Transactions on Industry Electronics, 2005, 52(3): 758-764.
[14]Dong P Gan, Olorunfemi Ojo. Current regulation in four-leg voltage-source converters[J]. IEEE Transactions on Industry Electronics, 2007, 54(4):2095-2105.
