一种基于快扫描的牵引供电系统运行仿真方法
2010-06-27郭红卫卢西伟客金坤刘志刚
郭红卫,卢西伟,客金坤,刘志刚
0 引言
20世纪90年代国内开始了对直流牵引网的仿真研究。城市轨道交通直流牵引供电系统运行仿真主要包括2方面的内容,一是列车的牵引计算,即在额定电压下,推导单一列车从起点到终点的运行情况(主要是运行时间,速度,加速度,列车位置,能耗等相关信息);二是供电系统网络的运行仿真,即以牵引计算的输出做输入,配合列车运行时刻表,经直流负载潮流分析,求出 N组列车同时在线路上运行时,线路上各指定点电压、电流及功率的变化。但是该研究一般只包含列车的牵引计算部分或供电网络的运行仿真,并没有形成系统的研究,并且该研究大多是基于 C语言或其他高级语言进行复杂的程序编制或繁琐的算法迭代。
本文针对城市轨道交通运行的特点,基于最快牵引策略进行了牵引计算。以牵引计算的输出为牵引供电系统网络仿真的输入,运用Matlab/Simulink建立了基于PWM整流器的牵引供电系统的仿真模型,通过外部程序对仿真模型的不断调用,以快扫描的方式完成了对直流牵引供电系统的仿真。该方法灵活简单,仿真效果好。
1 牵引计算
本文基于最快牵引策略制定牵引算法,让列车以最短的时间走完整个区段,尽可能发挥其牵引能力和制动能力。
牵引计算需要的数据主要有 3方面:机车参数,包括机车类型及其牵引特性,机车重量;上下行单列牵引重量;线路情况,如电气化区段总长度、最小曲线半径、上下行坡道等。要求提供的主要结果有区间运行时分及带电运行时分、区间上下行能耗、速度-距离曲线、时间-距离曲线以及列车网上取流-距离曲线等。
速度-距离曲线直接由原始资料获得。时间-距离曲线可在速度-距离曲线的基础上获得,即

计算中可将计算总距离分为n等份,每份长Δl,并取第i等份的平均速度为

则式(1)成为

当列车停车时,速度减为0,时间-距离曲线应在对应l处直接加上停车时分,时间-距离曲线是一条非减单调曲线。
能耗是按上下行供电臂分别求出的,列车通过上行(或下行)供电臂的带电运行能耗为

式中,U为牵引网额定电压,Δt单位是min。
车辆运行时,可将其看作一个质点,列车车辆运行期间牵引力F由动车组提供,通过查表由牵引特性曲线获得。车辆运行期间阻力 W由基本阻力W0,坡道附加阻力Wi,曲面附加阻力Wr组成。阻力计算公式为

2 牵引供电系统
牵引供电系统中的牵引变电所将三相高压交流电变成适合电动车辆应用的低压直流电。馈电线再将牵引变电所的直流电送到接触网上,接触网是沿走行轨架设的特殊供电线路,电动车辆通过其受流器与接触网的直接接触而获得电能,走行轨构成牵引供电回路的一部分,回流线路将轨道回流引向牵引变电所,如图1所示。
2.1 牵引供电系统仿真模型的建立
牵引变电所是直流牵引供电系统的电源,本文采用戴维南等值电路建模。国内在以往的研究中,12脉波或24脉波对整流机组建模。然而随着人们对电能质量问题的关注,在我国新建的城市轨道交通线路中,开始采用脉冲整流电路,以减小谐波含量、降低城市轨道交通对公用电网的不良影响,实现能量回馈,提高能量利用率。本文对PWM整流器进行建模,根据交流电源和整流机组的具体参数,按整流机组的全外特性曲线,合理等值成戴维南电路,在仿真计算过程中,通过不断调用,根据负荷条件随时修正数学模型。
对于三电平整流模块本文采用 SVPWM 调制方式,主电路拓扑由多个PWM整流器并联组成,每个PWM整流器均使用电流前馈解耦算法进行电流闭环控制,同时使用电压外环保证脉冲整流器的电压输出恒定,其在同步旋转d-q坐标系数学模型如式(6)所示。
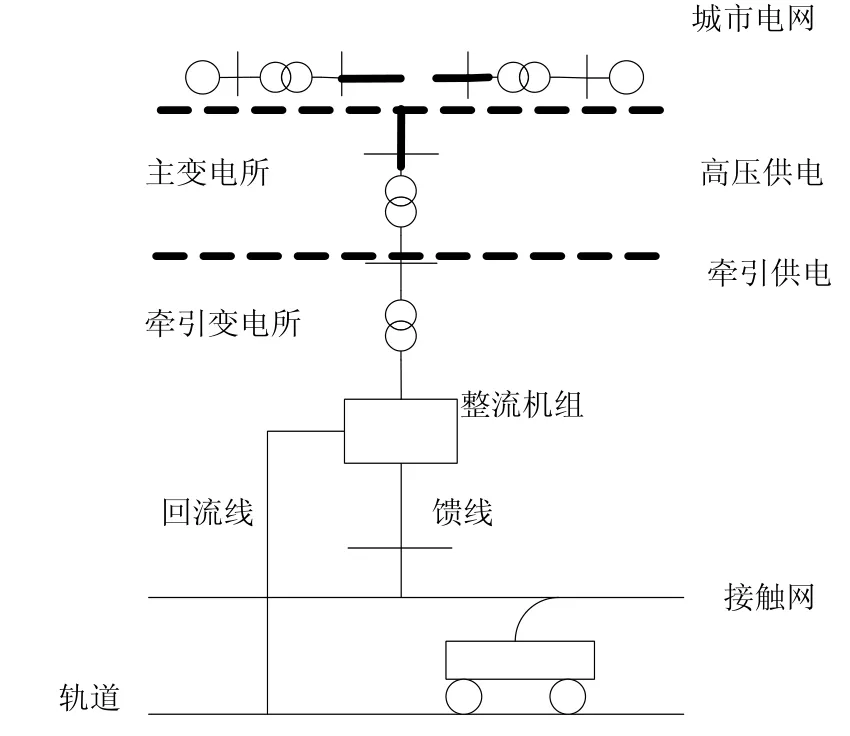
图1 城市轨道交通系统构成示意图
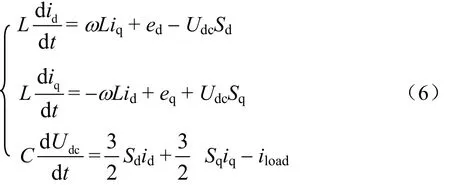
式中,Sd,Sq均为 d-q坐标系中的开关函数;ed,eq分别为电网电压d,q轴分量;id,iq分别为电网电流d,q轴分量。
定位d轴与电网电压矢量同轴,则eq= 0,分别控制id,iq就可以实现对有功和无功的控制。采用基于同步旋转坐标系的双环控制结构,电压外环控制直流电压稳定,电流内环实现单位功率控制。
2.2 牵引网建模
本文将直流侧牵引供电计算全线视为完整的网络,基于如下的假设建立供电系统仿真模型。
(1)列车等效为一电流源从牵引网上取流。列车在某时、某位置的取流根据牵引计算结果给出。
(2)假定将全线各整流机组视为带内阻的电压源支路。
(3)假定牵引网系统为均匀对称结构,整个牵引网系统具有一致的单位长度电阻。
(4)各列车均按照运行图规定的时刻表行驶,既不提前也不晚点。
如图2所示,上下行线路供电情况下,牵引供电计算以ΔT为扫描间隔,刷新一次直流侧网络结构图,电流源作为列车等效模型,其电流值随着扫描时间的变化而变化。
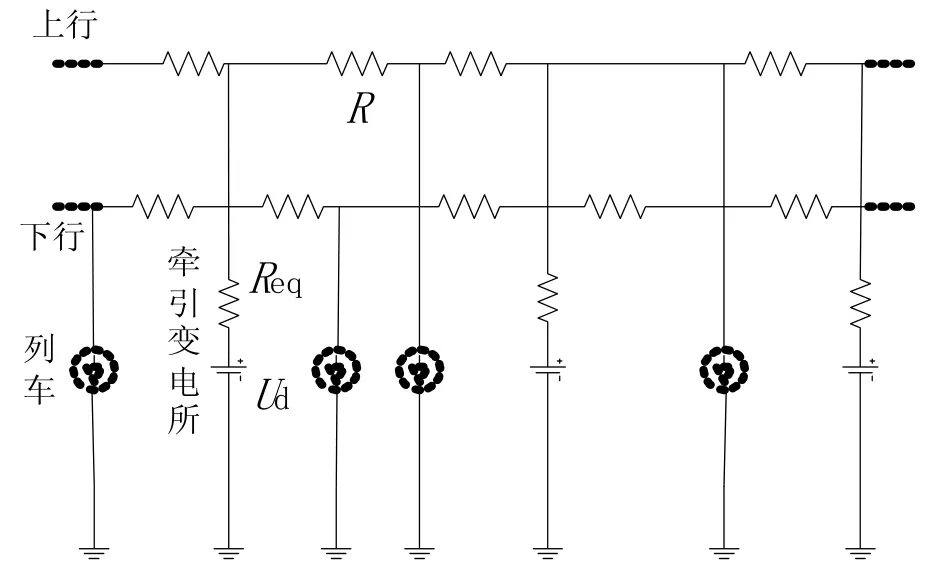
图2 牵引网供电模型图
2.3 仿真算法
考虑到实际情况,研究线路上最多有2辆车运行时的情况,原理图如图3所示。2辆车可能的位置如图中1,2,3,4,5,6,7,仿真中根据2辆车的实际位置给 Z,Z1,Z2,Z3,Z4,Z5赋值,通过不断改变车辆的位置来完成多车辆运行仿真。
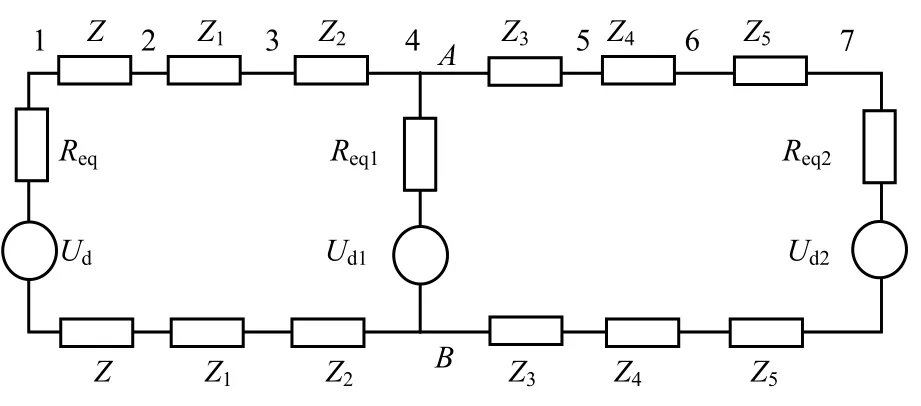
图3 多牵引变电站双边供电多车运行仿真原理图
算法流程如图4所示,其仿真模型输入参数是牵引计算的输出,该数据按外部程序的控制对仿真模型进行赋值。外部程序不断调用仿真模型并对其进行赋值,完成牵引供电系统的运行仿真。
可以利用下式来校验牵引网各点的电压:
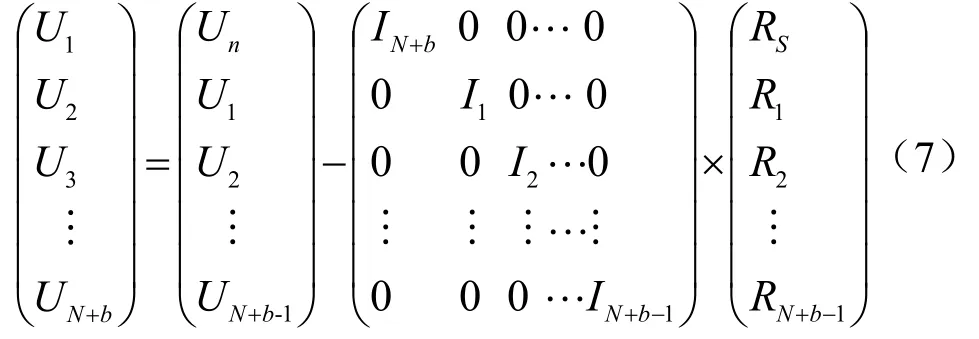
由于牵引供电网络是一个实时动态网络,因此以上计算只是在某一时刻的网络状态,对于下一个时刻的计算,首先还是应该根据列车运行图及列车牵引计算资料,确定新时刻的列车数量与位置、负荷大小,相应地确定新时刻的牵引供电网络结构及负荷情况,建立起新时刻的牵引网等效网络图;然后再根据新等效网络图,依据以上方法建立新的矩阵方程,以此求解新扫描时刻的各项参数。
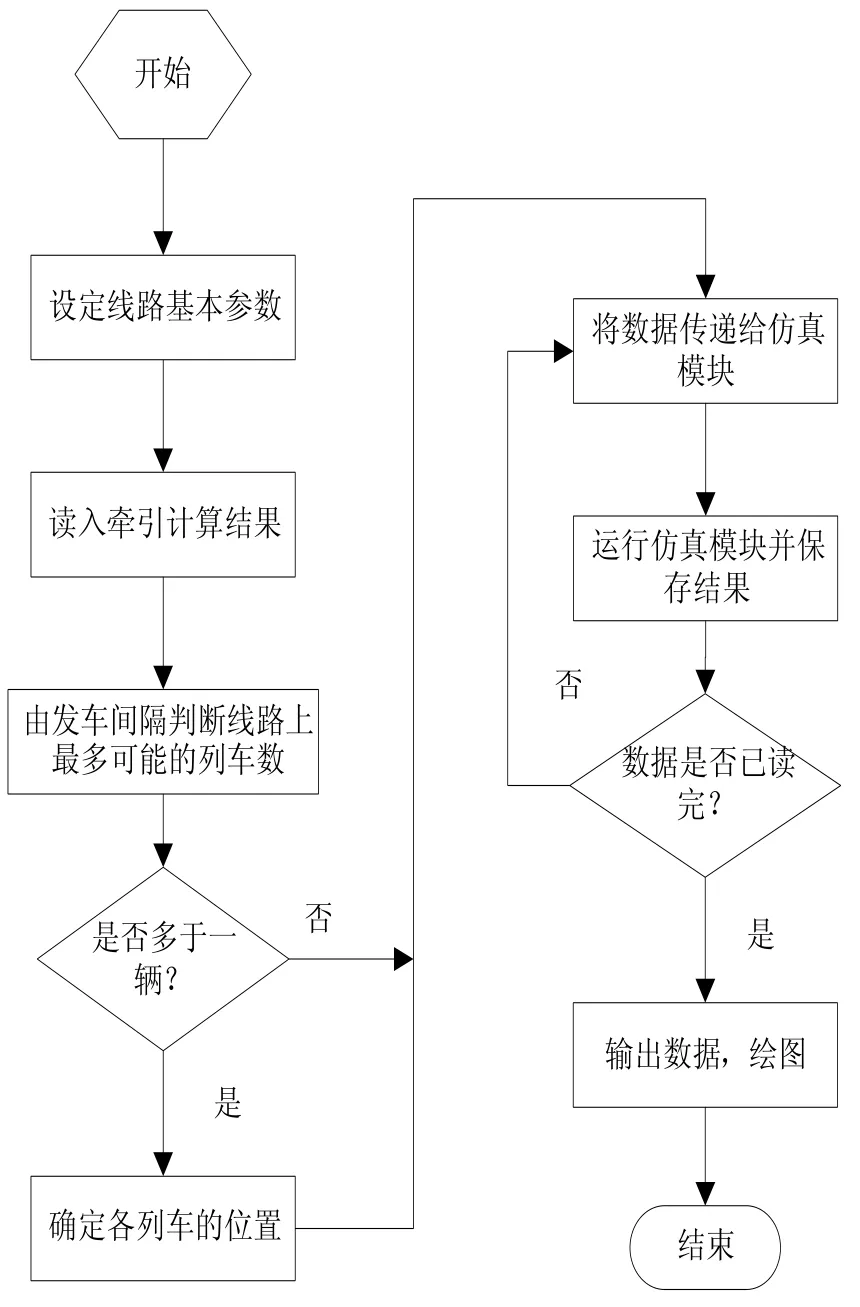
图4 算法流程图
3 仿真示例
仿真中取交流侧滤波电感L为400 μH,直流侧滤波电容为30000 μF,开关频率2 kHz。输入线路的站台信息,坡度信息,转弯信息,如表1,确定线路参数,线路长度为2200 m,共有甲乙丙3个站台。先通过牵引计算得出基本曲线和电流功率曲线,如图5,图6,该数据将作为牵引供电网的输入,从而得出供电网络的仿真结果,如图7,图8给出了各变电站和各车的电压电流功率随时间的变化情况。由图可以看出,牵引计算和直流供电系统网络仿真的结果与实际情况相符。

表1 线路参数表
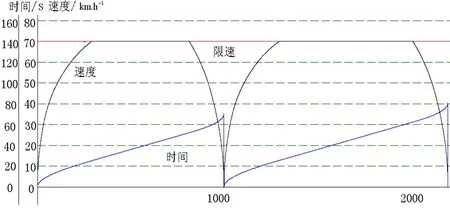
图5 基本曲线图
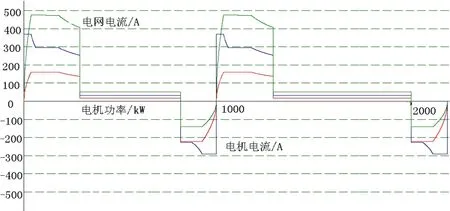
图6 电压电流功率曲线图
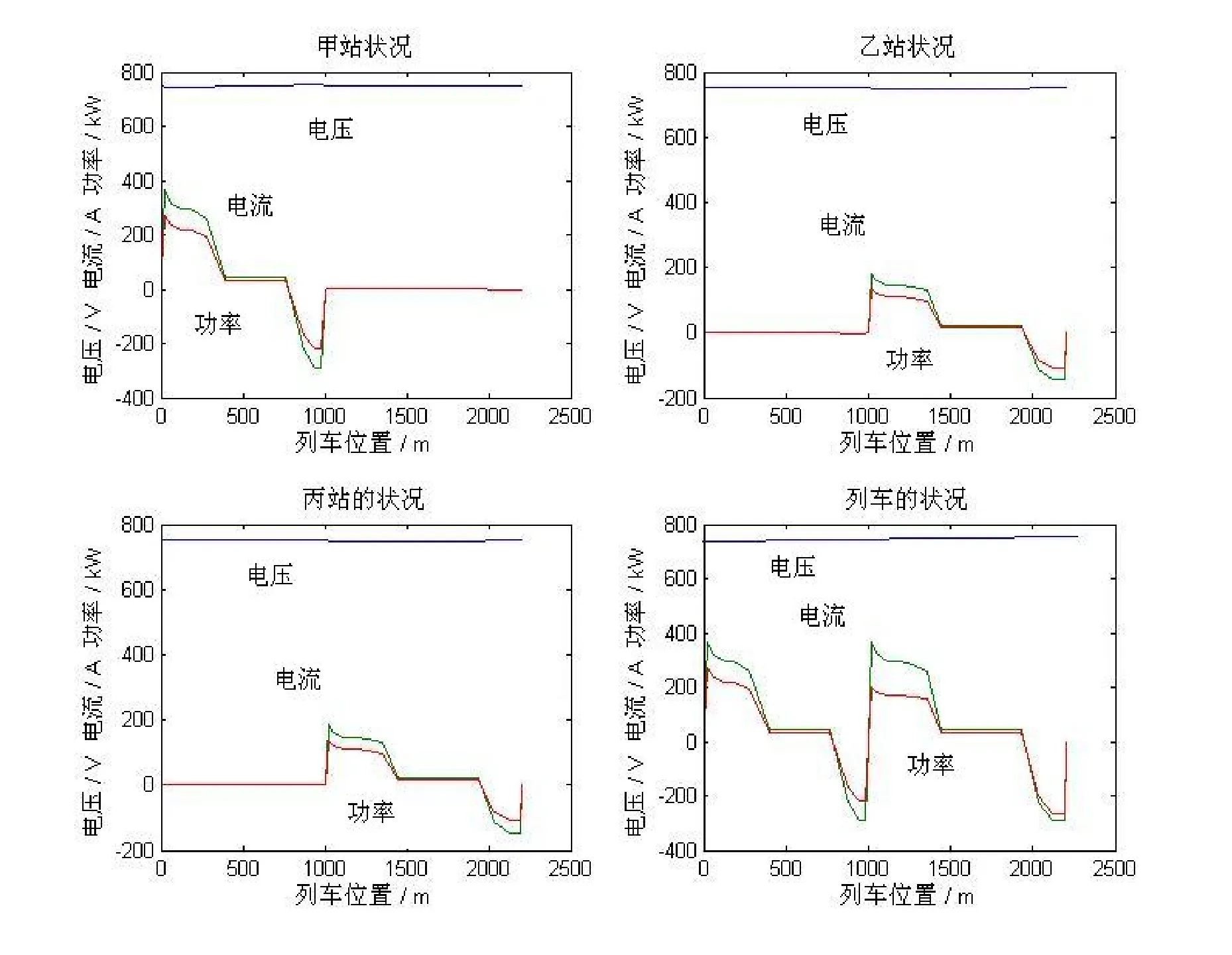
图7 多牵引变电站单车运行双边供电仿真结果图
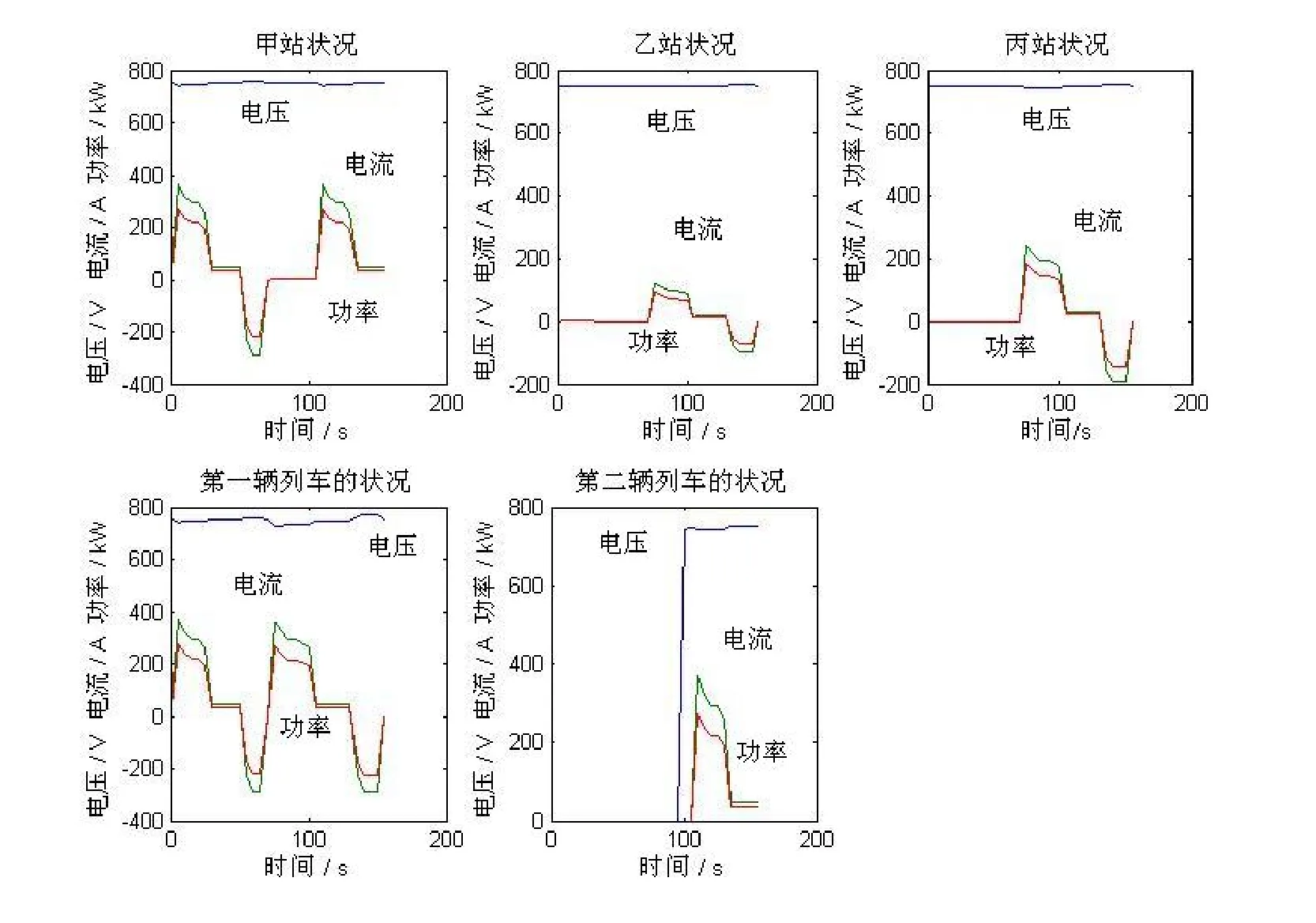
图8 多牵引变电站双边供电多车运行仿真结果图
4 结论
本文对直流牵引供电系统进行了牵引计算和供电网络的运行仿真,基于最快牵引策略进行了牵引计算;运用 Matlab/Simulink建立了基于脉冲整流器的牵引供电系统的仿真模型,以牵引计算的输出为牵引供电系统仿真模型的输入,用快扫描的方法完成了对直流牵引网的运行仿真,得到了列车在线路上运行时列车、各牵引变电站的电压、电流、功率随时间变化的曲线。最后给出的仿真实例与实际相符,表明仿真模型与仿真算法切实有效,达到了目的。
[1]刘炜.城市轨道交通供电系统仿真[D].西南交通大学硕士论文,2006.
[2]王亚玲,吴命利,胥刃佳.城市轨道交通直流牵引供电系统的运行仿真[J].电气化铁道,2006,(12):38-41.
[3]王亚玲,吴命利.直流牵引变电所在供电系统运行仿真中的建模[J].电气化铁道,2005,(14):4-7.
[4]王晓东,张洪斌.城市轨道交通直流牵引供电系统的仿真研究[J].系统仿真学报,2002,(14):92-97.
[5]李群湛,贺建闽.牵引供电系统分析[M].成都:西南交通大学出版社,2007.
[6]于松伟,杨兴山,韩连祥,等.盛水轨道交通供电系统设计原理与应用[M].成都:西南交通大学出版社,2008.
[7]Xiwei Lu, Zhigang Liu, Lei Wang,Maosheng Shen. On the Characteristics of a Novel Traction Power Supply System Based on Three Level Voltage Source PWM Rectifier[J].IEEE Vehicle Power and Propulsion Conference (VPPC),September 3-5, 2008, Harbin, China.
