基于运动检测的智能监控系统的设计与实现
2010-06-07齐保谦
王 玮,齐保谦
(广西工学院 鹿山学院,广西 柳州 545616)
1 引言
目前,低成本、高性能、快速、智能化的视频监控系统越来越受欢迎。对一个没有人员往来的场合,如果把所有监控图像都记录下来是没有必要的,也需要更多硬盘容量。针对这种情况,笔者设计了一种智能监控系统。该系统只在检测到有行人进入监控区域时,才将采集的视频图像压缩,并同时将压缩后的视频图像经过网络传输回监控中心保存。利用该系统可以有效减少需要传输、保存的数据量,降低对网络及硬盘容量的要求,而且不会错过监控对象。
2 系统工作原理及硬件组成
系统的总体框图如图1所示,系统的核心处理器为TMS320DM642(以下简称为 DM642)[1],该芯片是 TI公司C6000系列32位定点DSP,工作频率由内部倍频器设置,可以达到 500 MHz,600 MHz,720 MHz,可执行指令数 4000 MI/s(兆指令/秒),4800 MI/s,5760 MI/s。DM642采用TI公司第二代增强型超长指令集,它的EMIFA接口数据可直接与大容量、低成本的SDRAM芯片无缝连接。DM642带有3个双通道(A,B两通道)数字视频口,可同时处理多路数字视频流。因其处理性能强,外围接口多而灵活,在机器视觉、医学成像、网络视频监控、数字广播等领域得到了广泛应用。
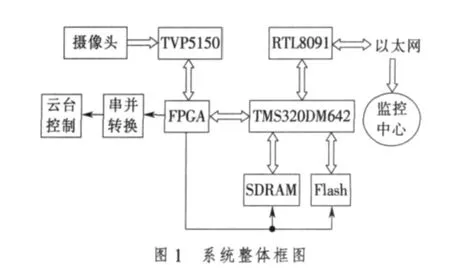
视频解码芯片采用TVP5150,视频解码芯片把摄像头采集的复合电视信号转换成数字视频信号。由于在摄像头转动过程中,它将不采集图像,而在摄像头全速采集图像时,DM642因需要完成图像的清晰度评价、运动目标的检测、跟踪以及云台控制命令的产生等一系列的处理,又可能出现DM642的处理速度跟不上。为了协调图像的处理与采集,可利用FPGA内部资源构建高速双端口RAM作为DM642的前端缓存,其内部结构如图2的虚线框内所示。逻辑控制单元A将从视频解码器传来的数据按时间段分别送到缓冲器1和缓冲器2中,逻辑控制单元B负责双端口的读、写控制以及中断信号的产生等。本设计中,采用Altera公司的CyloneIII系列产品EP3C120作为FPGA器件,同时FPGA还担负系统的部分控制功能,如串口控制、存储器控制等。

串并转换芯片采用TI公司的TL16C752B,它把来自DM642的8位并行数据转换为RS-485串行芯片可以使用的串行数据,并借助于电平转换芯片MAX3485构成串口电路。云台使用RS-485(硬件层)和PELCO-D(软件层)协议与DM642通信。DM642对数字视频信号进行处理和运算,根据计算结果从串口输出控制命令,控制云台的转动,调整摄像头的朝向和焦距。
3 系统算法设计
3.1 清晰图像的获取
3.1.1 图像清晰度的评价
根据清晰图像(聚焦图像)和模糊图像(离焦图像)的特点,可以借助以下几个函数来评价图像的清晰度[2]:
1)灰度变化函数。聚焦图像比离焦图像包含更多的灰度变化,这样图像灰度值的变化可以作为评价函数。
2)梯度函数。在图像处理中,图像梯度可以用来进行边缘提取。离焦量越小,图像边缘越锋利,具有很大的图像梯度值。因此,图像的梯度变化也可以作为评价函数。
3)图像灰度熵函数。聚焦图像的信息熵要大于离焦图像的信息熵。因此,图像的灰度熵也可以作为评价函数。
4)频域类函数。这类函数主要基于傅里叶变换,傅里叶变换的高频分量对应图像边缘,而聚焦图像总是具有锋利的边缘,即包含着更多的高频分量,这样可以根据图像傅里叶变换后高频分量的多少作为评价函数。
本设计采用灰度变化函数(即灰度差分法)作为图像清晰度的评价依据,该方法形式简单而且效果良好。它根据图像的相邻像素差的绝对值之和作出判断,其函数形式为

当图像聚焦清晰时,F(x,y)值最大。
3.1.2 自动聚焦的搜索算法
常用的聚焦策略有全局搜索法、分级搜索法[3]、爬山法等。
爬山法是一种应用广泛的搜索算法。如图3所示,首先,聚焦镜头作任意方向搜索,并假定从图3的点M开始搜索,确定搜索方向,向点N方向进行,也就是点N的评价值大于点M的评价值。这时,镜头向顶部方向运动,直到越过顶部到达P1为止,第一次搜索结束,如图3中的实线所示,即路径为M-N-P1;接着由P1开始,调头回去向顶部P运动,直到P2为止,第二次搜索结束;每搜索一次,步距相应减小;如此反复,直到找到最大值为止,聚焦结束。

全局搜索策略是对镜头的每个预设的焦距位置从最远到最近进行检测并计算其聚焦评价函数值,找出聚焦评价函数值最大的位置,然后驱动电机使镜头定位到聚焦函数值最大的位置。这种方法能有效克服回程定位误差,但是本设计中摄像头的朝向将随运动物体的运动而改变,如摄像头朝向每改变一次都对镜头的多个预设焦距位置从最远到最近进行图像采集,并计算其聚焦清晰度评价函数值,因此计算量大而且费时。
考虑到运动目标(行人)的速度不会太快,采集相邻图像对应的焦距也不会相差太大,故本设计中采用爬山法和全局搜索相结合的方法。在上电复位初始,系统将在每一个预设的焦距上采集图像,并对这些图像做清晰度评价,最后依照最清晰的图像确定系统初始焦距。当摄像头受云台控制转动后,因在较短的时间内,运动目标的运动路程有限,摄像头的焦距变化也较小,可以采用爬山法再次聚焦,以减少计算,节约时间。
另外,系统在进行清晰度评价时只需要视频信号中的亮度信号即可。DM642统计相邻两场图像的亮度信号,并按照本系统提出的图像清晰度评价函数对图像进行分析、比较,并把依此作出的控制命令输入到FPGA中。完成串并转换后,控制数据被传送到云台解码器,摄像头的焦距得以调整。
3.1.3 光圈大小的控制
光圈大小反映了进光量的多少,体现在图像上就是灰度值的大小。因此可以通过计算图像的平均灰度值与预定的亮度值进行比较,来控制云台对光圈进行调整,达到自动调整光圈的目的。
3.2 运动目标的检测
对于运动目标的检测,常用的方法有背景差值法、图像差分法、光流分割法和模式匹配法。由于光流分割和模式匹配等方法数据计算量较大,难以满足实时检测的要求。背景差值法计算简单、速度快且检测准确,但在背景不变时才能检测有效,不适合背景变化的场合。对于背景变化的场合,可以采用图像差分法,即通过检测图像序列相邻两帧对应像素点之间灰度值的变化确定移动的物体。同时,视频图像每秒采集25帧,相邻两帧间隔为0.04 s,即使运动目标的移动速度达到10 m/s,相邻两帧间运动目标的运动距离只有0.4 m,大约为人步长一步的距离。因此,在运动目标距监控摄像头一定距离的前提下,运动目标不会逃出相邻两帧图像。
图像定义为 f(x,y,i),其中(x,y)为图像的位置坐标,i为图像帧数,T 为设定的阈值,则帧 f(x,y,i)与帧f(x,y,i-1)之间的变化可用如下的二值差分图像表示

式中,取值为1和0的像素分别对应于前景(运动目标区域)和背景(非运动区域),当非零像素总数大于阈值时,则认为发现运动目标。
3.3 运动目标的跟踪
目标跟踪算法有多种,本设计采用形心识别算法。形心,即图像目标的几何中心,对于准确的定位目标具有很重要意义。形心获取通常采用形心识别算法,又称形心跟踪算法。当目标尺寸较小时,如果用图像处理中的模板匹配法,那么由于所取模板与背景差异不大,目标特征不够明显,很容易发生伪匹配,此时,宜采用形心跟踪法进行跟踪和测量。对于已经二值化后的图像,其形心计算公式为
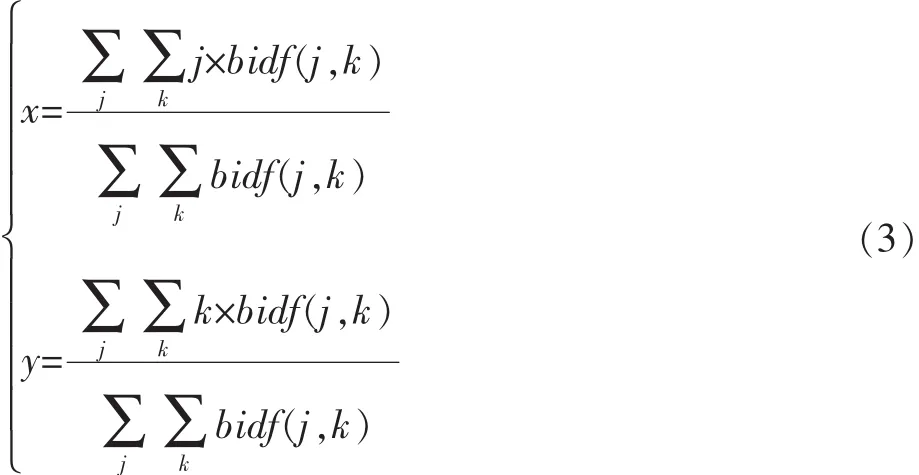
形心跟踪得到运动目标的坐标后,以此坐标代替运动物体,进而得出运动物体轨迹,DM642依此作出相应的控制信号,驱动云台电机进行跟踪[4-5]。
4 系统工作流程
系统上电复位以后首先完成FPGA芯片的配置、TVP5150初始化、DM642的启动引导及各寄存器的设置等。从摄像头采集到的模拟信号经解码器TVP5150解码以后,在FPGA的控制下被送到DM642的视频口(VP0端口)。系统在检测到有行人进入监控区域时,启动跟踪、录像功能,并把记录下的视频数据压缩后传回值班中心。
值得注意的是:系统工作时,摄像头焦距的调整、运动目标的检测与跟踪等并不是彼此独立的。为了跟踪运动目标,摄像头需要随目标运动而运动,当摄像头转动以后其焦距也需要适当调整,重新采集图像并检测、跟踪运动目标。系统工作流程如下:
1)系统初始化。
2)调整摄像头焦距,在聚焦完成静止时,连续采集两帧清晰图像,用相邻帧差法按式(2)计算,检测运动区域,并记录图像中非零像素(因为差分被二值化)的总数。
3)当非零像素总数大于阈值时,则认为发现运动目标。按式(3)计算形心并保存。否则更新当前帧并转到步骤2)继续执行。
4)计算形心与图像中心的偏差量确定要发送的云台控制信号。如果偏差量大于阈值,则通过串口模块发送,驱动云台向相应的方向转动,并同时更新背景帧与当前帧。如果偏差量小于阈值则暂不调整摄像头的朝向,只需更新当前帧并转到步骤2)继续执行。
5 实验结果与分析
跟踪实验中,让行人以慢速、常速、快走等速度进入监控区。结果表明系统都能及时检测到运动目标,并准确地跟踪。当没有行人进入监控区域时,系统会暂停视频图像的压缩、传输功能。
此外,实验发现在多个运动目标同时出现在监控区域时,尺寸较小、与背景对比度小、运动较快的目标容易被遗失,这也是笔者进一步研究的内容。
6 小结
笔者设计的智能监控系统,利用运动目标检测、跟踪方法,在提高系统的智能化同时,大大缓解了网络的传输量,降低了硬盘的存储压力。设计中充分利用DM642的高速多媒体信号处理能力以及FPGA的逻辑控制优势,采用差分法来检测运动目标,采用形心法来定位、跟踪目标。实验证实,系统反应快速,跟踪效果良好,可用于对往来人员较少的小区进行监控。
[1]Texas Instrument.TMS320DM642 video/imaging fixed-point digital signal processor[EB/OL].[2010-02-05].http://focus.ti.com/lit/ds/symlink/tms320642.pdf.
[2]任四刚,李见为,谢利利.基于灰度差分法的自动调焦技术[J].光电工程,2003,30(2):53-55.
[3]黄强,胡广书.一种灵活的块匹配搜索算法——分级搜索法[J].电视技术,2002,26(5):9-11.
[4]权立伟,石江宏,薛财锋.IP视频监控系统中云台控制模块的设计与实现[J].电子技术应用,2006(11):86-88.
[5]杨元挺.快速反应智能安全监控系统的设计与实现[J].电子技术应用,2009(11):18-21.
