船舶在浅水域横向停靠运动粘性水动力计算
2010-06-07王化明邹早建田喜民黄永生
王化明,邹早建,田喜民,黄永生,
(1浙江海洋学院船舶与建筑工程学院,舟山 316000;2上海交通大学船舶海洋与建筑工程学院,上海 200240 3中国船舶及海洋工程设计研究院,上海 200011)
船舶在浅水域横向停靠运动粘性水动力计算
王化明1,邹早建2,田喜民3,黄永生1,
(1浙江海洋学院船舶与建筑工程学院,舟山 316000;2上海交通大学船舶海洋与建筑工程学院,上海 200240 3中国船舶及海洋工程设计研究院,上海 200011)
研究船舶在浅水域的低速横向漂移运动对研究船舶停靠运动特性具有重要意义。船舶停靠通常是一个低速慢漂的过程,在这个过程中,由于船舶特定的运动形式和几何形状,粘性水动力起主要作用,而兴波很小,其影响可以忽略,可以将自由面作为刚壁处理,从而使问题简化并大大减小数值计算的计算量。文中以标准Wigley船型为对象,对船舶在浅水中横向漂移运动的粘性流场和水动力进行了计算。为了得到准确、稳定的计算结果,分别选取了不同的计算区域、网格数量和湍流模型进行计算,并将计算结果与他人的计算结果和模型试验结果进行了比较,确定了模拟船舶低速停靠运动粘性流场的有效的数值方法。
船舶停靠;数值模拟;浅水;横向水动力
1 引 言
船舶停靠是船舶航行过程中的重要一环,涉及到船舶的安全性和操作性能,研究船舶停靠过程中的流场和水动力具有重要意义。迄今为止,尽管采用CFD方法研究船舶斜航运动的工作已有很多[1-3],但模拟船舶横向停靠运动粘性流场的研究还不多。国外Chen等[4]采用chimera RANS方法模拟了时域内船舶停靠运动,Lee等[5]采用有限分析法对Wigley船模横向漂移进行了流场和水动力计算,Pinto-Heredero[6]采用非定常RANS方程求解器对Wigley船以极大斜航角运动的粘性流场进行了数值模拟,而国内在这方面的研究工作尚未见文献报道。
船舶停靠运动通常是一个横向慢漂的过程,从船舶操纵性角度来看,其航行状态相当于船舶斜航的极限状态(漂角为90°),与小角度斜航运动殊有不同。由于船舶停靠时航速非常低,船舶兴波对船舶水动力的影响很小,故可以在采用CFD方法计算流场和水动力时忽略自由面兴波的影响,这样在满足流场和水动力计算精度的同时能够大大地减小计算量。船体外形在设计时,沿船长方向通常被设计为流畅的线型,这样可以提高船舶直航时的阻力性能;但是船舶在作低速横向运动时,船体在船宽方向的形状特性将会在船舶的背流面引起强烈的流动分离和旋涡,从而产生很大的横向力,这个力绝大部分源于船舶所受的粘压力。此外,现实中的大型船舶在停靠时,港口水域相对于这类船舶往往成为所谓的限制水域。由于船舶横向的扁平特性及受水深的限制,船舶首尾和底部附近的流场都将产生很强的绕流,从而导致船舶在限制水域作横向漂移运动时受到的水动力较之在无限水域运动时大得多,使船舶的水动力性能发生变化,有可能造成碰撞、触底等海难事故。因此,计算船舶在限制水域作低速横向运动时的流场和船舶所受的水动力具有重要的实际意义。
当代计算机技术的飞速发展已为采用粘性流方法解决船舶水动力学问题提供了很好的条件。尽管如此,采用直接求解连续性方程和N-S方程的方法来计算船舶粘性流场和水动力在近期内仍然不可能实现。目前,工程计算中主要采用两种简化的方法:大涡模拟和雷诺平均。对目前的计算机发展水平,大涡模拟的方法由于其计算量仍然很大还不适合处理复杂的问题,而采用基于雷诺平均的N-S(Reynolds Averaged Navier-Stokes,RANS)方程和合适的湍流模型的粘性流方法来计算船舶粘性流场和水动力是一个很好的选择。
本文应用CFD商业软件FLUENT,采用RANS方程和湍流模型相结合的粘性流计算方法研究浅水中船舶低速横向停靠运动的流场和水动力,分析了不同网格数量、计算区域以及不同湍流模型对粘性流数值解的影响,确定了模拟船舶低速停靠运动粘性流场的有效的数值方法。本文的方法可以预报船舶停靠时的流场和水动力,从而为操纵和控制船舶停靠运动提供一定的理论指导。
2 问题的描述及数值方法
2.1 物理问题
考虑在水深为H的浅水域以速度U0朝左舷作定常低速横向运动的船舶。采用如图1所示的固连于船体上的右手直角坐标系,其中xoy平面位于无扰动自由面上,x轴指向船右舷,z轴垂直向下;图中d为船舶吃水。
2.2 控制方程
船舶低速横向运动的流场和水动力计算是一个不可压缩粘性流问题。对该问题采用RANS方程求解方法求解,其控制方程如下:
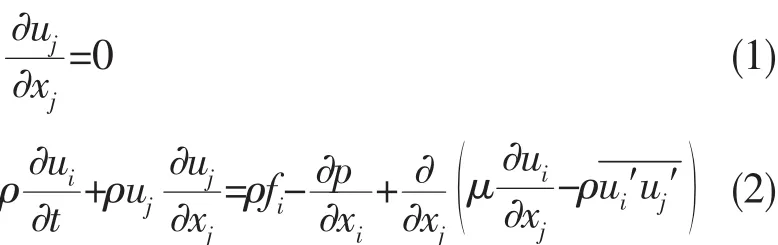
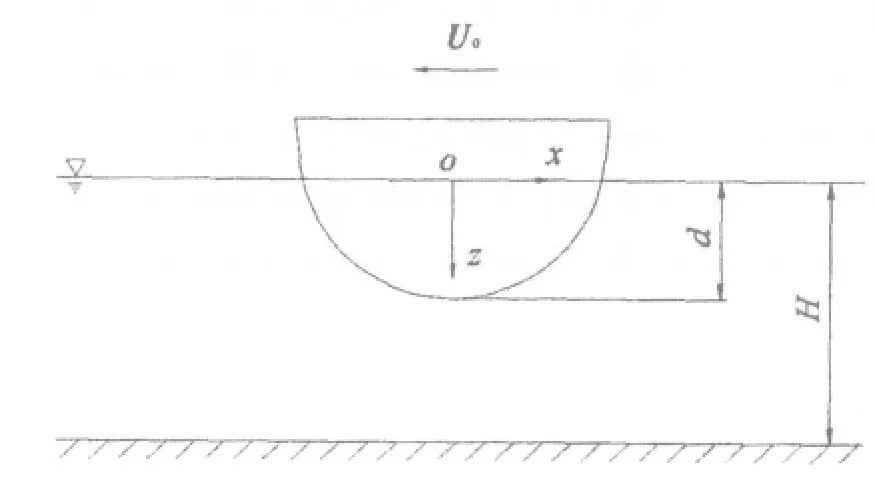
图1 坐标系Fig.1 Coordinate system

2.3 湍流模型
为了使雷诺平均后的控制方程封闭,必须对雷诺应力项进行模化。在船舶粘性流场和水动力计算中,常用的湍流模型主要有k-ε模型和k-ω模型。前者分为S k-ε模型、RNG k-ε模型和R k-ε模型三种;后者分为S k-ω模型和SST k-ω模型两种。
S k-ε模型即标准k-ε模型,它是个半经验的公式,仅仅对完全湍流流动有效,适用于高雷诺数。RNG k-ε模型即所谓的重整化群组k-ε模型,它来源于严格的统计技术,在ε输运方程中增加了附加项Rε,从而大大改善了快速变形流动的模拟精度。此外,该模型对湍流普朗特数提出了解析公式,相较于S k-ε模型中的常数更合理;该模型考虑了低雷诺数的影响,因此模拟流场更加合理。R k-ε模型的ε从精确的涡量扰动均方根输运方程导出,满足雷诺应力的数学限制,与湍流流动的本质一致,这点较S k-ε模型和RNG k-ε模型更优越。R k-ε模型适合于旋转流动、强逆压梯度的边界层流动、分离流和二次流。
S k-ω模型即标准k-ω模型,它基于Wilcox k-ω模型,综合考虑了低雷诺数的影响、可压缩性和剪切流传播等因素。SST k-ω模型即剪应力输运k-ω模型,它由Menter开发,相较于标准k-ω模型主要有如下改进:
(1)引入了混合函数,在近壁区域启用标准k-ω模型,在远场区域启用变形的k-ω模型;
(2)在ω方程中增加了交叉扩散导数项;
(3)修改了湍流粘性的定义,考虑了湍流剪应力的输运;
(4)模化常数不同。
这些改进使得SST k-ω模型比S k-ω模型在广泛的流动域中有更高的精度,尤其对于存在逆压梯度的流动、机翼、跨声速激波等流动的模拟。ω方程中增加了交叉扩散项和混合函数,使得该模型无论对于近壁还是远场,都能很好地模拟。
本文采用RANS方程求解方法,分别结合上述除S k-ω模型以外的4种湍流模型进行了计算。
2.4 离散方法
本文采用基于控制体的有限体积法(Finite Volume Method,FVM)计算船舶横漂运动的流场和水动力,把一般的标量输运方程转化为能够数值求解的代数方程。FVM的基本思路易于理解,能得到直接的物理解释,不同于有限元法物理意义不明确。FVM离散方程的物理意义,即因变量在有限大小的控制体积中的守恒原理,如同微分方程表示因变量在无穷小的控制体积中的守恒原理一样。格式的守恒性是FVM吸引人的优点。
代表控制方程的标量输运方程在直角坐标系下可写为:

其中,φ 可取 1,u,v,w,k,ε 等;Γφ为 φ 的扩散系数,在动量方程中等于动力粘性系数,sφ为源项。若定义包含对流通量(convective fluxes)和扩散通量(diffusive fluxes)的总通量为:

考虑定常问题,方程(3)可改写为如下等价形式:

或用矢量记法表示为:

在物理空间的控制体上对方程(6)进行积分,并利用高斯定理得到对流扩散方程:

离散对流扩散方程(7),得到积分形式的代数方程:

式中,下标 w,e,s,n,b,t分别表示单元体的西、东、南、北、下和上表面。
3 算例及数值结果
本文以船长L=2.5m的标准Wigley船模为计算对象,计算其在深、浅水中作低速横向运动的粘性流场以及水动力。标准Wigley模型的船型表达式为:

其中B为船宽,主要尺度比为L:B:d=10:1:0.625。
对水深吃水比H/d=1.5、2.0、7.0的情况进行了计算,其中,H/d=1.5、2.0时为浅水情况,H/d=7.0时视为深水情况。计算中取横向运动速度U0=0.04m/s,相应的雷诺数为Re=U0B/ν=1.0×104(ν为水的运动粘性系数)。
3.1 计算区域及边界设置
船舶以速度U0朝左舷作定常横向运动,根据相对运动原理,可以假设船体不动,水流以匀速U0向右流经船体。计算区域的选取及边界设置如图2所示。计算区域的上表面为无扰动自由面,下表面为水底。由于不考虑兴波的影响,将上表面设为对称面。入流面和船前、船后两边侧面设置为速度入口,速度值为U0。底部设置根据具体的水深情况:在浅水情况下,需要考虑水底的壁面影响,将其设为移动壁面,其移动速度为U0;在深水情况下,将其设为速度入口,速度值为U0。出流面上的流动为充分发展流动,故出流面应选择离船体足够远。
3.2 网格划分
由于标准Wigley船的形状关于船舯剖面是对称的,当其作横向运动时,绕船体的流动关于船舯剖面也是对称的,所以,可以以船舯剖面为界只考虑半个船长的流场区域。相应地,对半个流场区域进行网格划分,如图3所示。
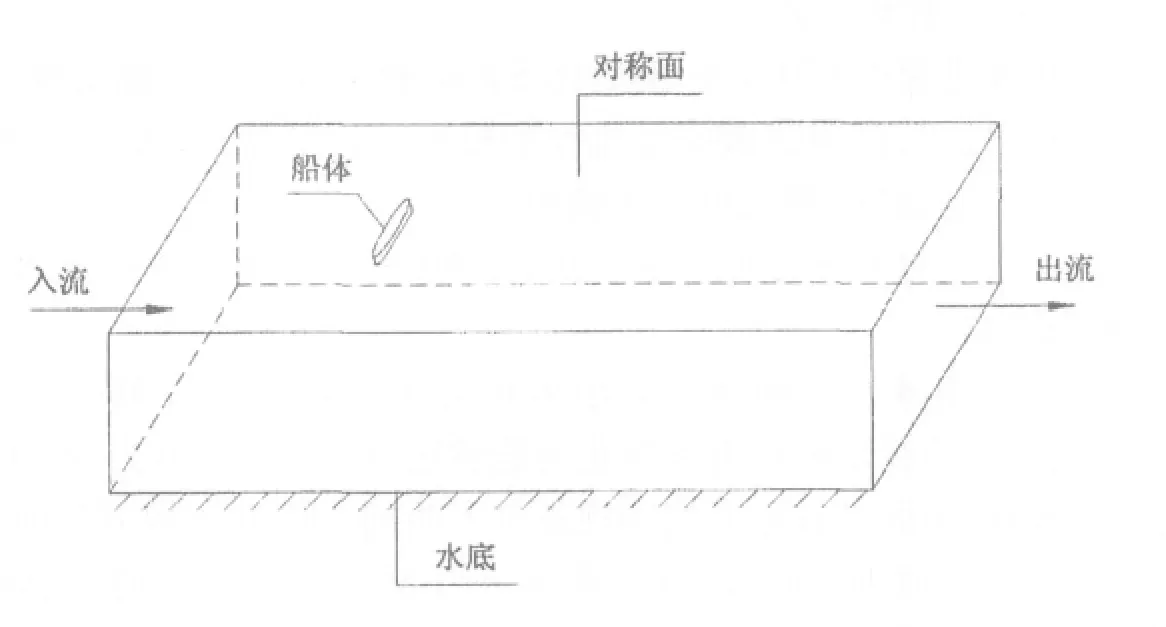
图2 计算区域Fig.2 Computational domain
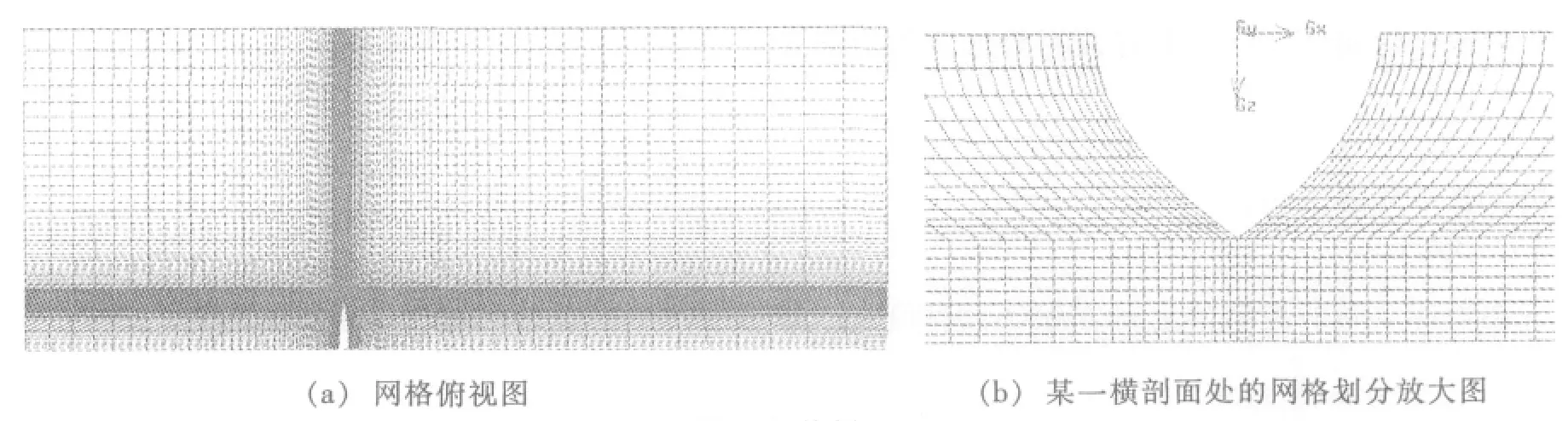
图3 网格划分Fig.3 Grid division
3.3 网格密度的选取
从表1中可以看出,随着网格总数的增加,横向力系数趋于稳定。此外,Case 2的计算误差仅为1.55%,因此可以将采用此网格密度得到的数值解作为网格独立解结果。本文后续内容均采用此网格密度进行计算。

表1 不同网格数量的横向水动力系数比较Tab.1 Comparison of lateral force coefficients with different grid number
3.4 有效计算区域的选取
其次,为了分析计算区域对计算结果的影响,本文选用R k-ε和SST k-ω两种湍流模型,以水深吃水比H/d=1.5的浅水情况为例,在x和y方向采用两种不同的计算区域进行了计算。Case 1:x=(-2 ~ 4) L,y=(0~ - 2.5) L;Case 2:x=(-4 ~ 8) L,y=(0~ - 4.5) L。计算结果如表2所示。表中,计算结果和Lee等人的试验结果[5]进行了比较;误差的定义为:(计算结果-试验值)/试验值×100%。
从表2可以看出,不论是R k-ε模型还是SST k-ω模型,Case 1的计算结果相比于试验结果的误差都在20%以上,无法满足精度要求。而Case 2的计算结果相比于试验值的误差基本能控制在5%以内。在本文后续的工作中,计算区域的选取均采用Case 2的计算区域。

表2 采用不同计算区域得到的横向水动力系数及其误差Tab.2 Lateral force coefficients and errors with different computing domain
3.5 横向力系数的比较
通过以上两小节的分析,确定了合适的网格密度和计算区域。随后,以此网格密度和计算区域,采用S k-ε、RNG k-ε、R k-ε 和 SST k-ω4 种湍流模型计算了 3 种水深吃水比(H/d=1.5、2.0、7.0)下Wigley船模低速横漂的流场及横向水动力。图4中给出了本文的横向水动力计算结果,并将其和Lee等人的计算结果和试验结果[5]进行了比较。从图中可以看到,本文采用不同湍流模型计算得到的横向力系数随水深的变化趋势和试验结果一致,但本文计算结果均较试验值偏大。此外可以看出,横向力系数随水深的减小而增加;在水深很小时,浅水效应非常明显,此时横向力随水深的减小而迅速增长。
如图5所示,采用不同湍流模型计算得到的横向力系数相对于试验值的误差颇有不同。对于船舶低速横漂运动,采用S k-ε模型得到的结果相对于试验值的误差相当大,在H/d=1.5时计算误差达到12%左右;随着水深的增加,误差进一步增大,在H/d=7.0时计算误差甚至达到30%左右。误差之所以这么大的原因在于:S k-ε模型是个半经验的公式,仅仅对完全湍流流动有效,适用于高雷诺数;而对于船舶停靠时的横向慢漂运动,雷诺数相对船舶直航时要小很多,S k-ε模型对此不是很合适。

相对而言,采用另外3种湍流模型(RNG k-ε、R k-ε和SST k-ω)计算的结果,其误差要小得多。在H/d=1.5和2.0时,这3种湍流模型的计算误差都远远低于10%,特别是SST k-ω模型,其误差在3%内。可见这3种湍流模型都较好地考虑到了低雷诺数的影响。当H/d=7.0时,R k-ε和SST k-ω模型的计算结果误差分别达到了12%和13.6%,而RNG k-ε湍流模型仅为7.4%。从理论上来讲,R k-ε型的ε从精确的涡量扰动均方根输运方程导出,满足雷诺应力的数学限制,与湍流流动的本质一致,这点较RNG k-ε更优越。然而计算结果表明,对于本文低雷诺数流动情况,在水深吃水比较大时,RNG k-ε较R k-ε和SST k-ω模型能得到更好的结果。可见在水深比较大的情况下,RNG k-ε较R k-ε和SSTk-ω模型能更好地考虑低雷诺数的影响。总的说来,比较各种水深情况的计算结果,采用RNG k-ε模型计算的结果与试验结果的误差保持在一个很稳定的范围内。
与Lee等人的计算结果[5]相比,本文计算结果中除了采用S k-ε模型的结果误差比较大外,采用其它3种湍流模型的结果都明显比Lee等人采用有限分析法计算的结果要更精确。计算结果误差的一致性对于数值预报具有重要意义。本文的计算结果较试验值的误差都是正的,而Lee等人的结果则有正有负,从一致性方面来讲,本文的计算具有更好的数值预报能力。
3.6 速度场和船体表面压力分布
由于船舶的特殊外形,其作横向运动的流场较之作直航运动时有很大差别。本文选择比较典型的浅水情况(H/d=1.5)和深水情况(H/d=7.0)进行计算,并对计算得到的速度场及船体表面的压力分布进行分析。
3.6.1 深、浅水速度场
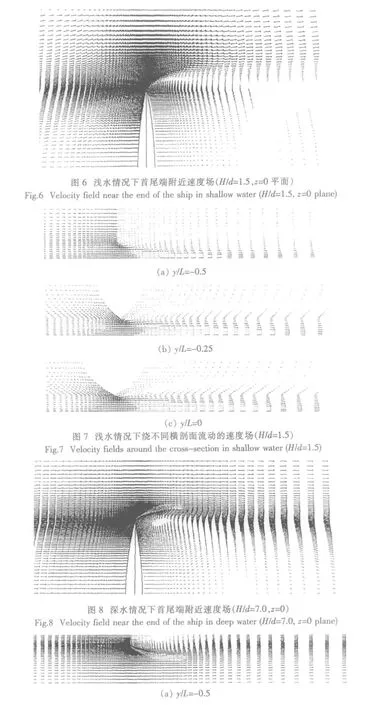
图6给出了浅水情况下船舶首尾端附近速度场,从图中可以看出,靠近船舶首尾端的流场尾流区域的水平面方向有非常强的尾涡。图7给出了浅水情况下绕不同横剖面流动的速度场,从图中看出,沿船长方向,越靠近船体端部,尾涡越明显,而且尾涡中心有向船体靠近的趋势。
图8为深水情况下船舶首尾端附近速度场。相比于浅水情况(图6),可以看出水平面上的尾涡与浅水时很相似,但范围较大,旋涡强度较弱。图9为深水情况下绕不同横剖面流动的速度场,从图中看出,沿船长方向,靠近船体端部,尾涡形状和中心位置的变化情况与浅水时相似;不过旋涡强度较浅水时明显要弱很多,特别是在船体端部,旋涡几乎已完全退化,仅在贴近船体的部位有微弱的旋涡。
比较深、浅水情况下绕不同横剖面流动的尾涡沿船长方向的变化情况,不难发现,浅水对尾涡强度有重要影响,从而导致浅水横向力较深水情况要大很多。
3.6.2 深、浅水船体表面压力分布
船体表面的压力分布情况如图10~12所示。
浅水情况下,图10(a)和图11(a)表明,迎流面的绝大部分区域的压力都比较高;而从图10(a)和图11(b)可以看出,几乎整个背流面都处于极低压状态。
图10(b)和图12(a)表明,深水情况下迎流面上的压力分布与浅水情况下迎流面上的压力分布有很大的不同,在接近船体底部的相当一部分区域压力相对较低。图10(b)和图12(b)所示的背流面的压力变化沿船长向端部递减,靠近船舯有相当部分的区域压力不是很低,只是在大约四分之一船长的区域才是极低压区。总的来说,H/d=1.5时船体两侧的压力差比H/d=7.0时要大得多,这进一步证实了浅水情况下的横向力系数比深水情况下的要大很多。
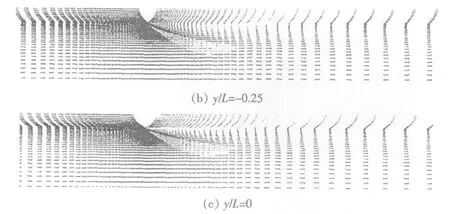
图9 深水情况下绕不同横剖面流动的速度场(H/d=7.0)Fig.9 Velocity fields around the cross-section in deep water(H/d=7.0)
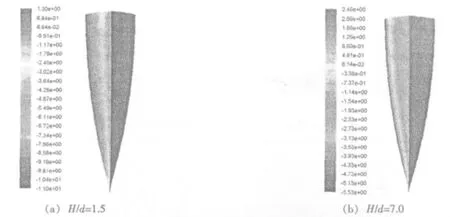
图10 船体迎流面(左半部)和背流面(右半部)上的压力分布俯视图Fig.10 Top views of pressure distribution on wind side(left half)and lee side(right half)of the hull
4 结 语
本文针对船舶在浅水域作低速横向停靠运动的特殊情况,以CFD软件FLUENT为平台,分析了采用不同网格密度和计算区域对横向水动力数值计算结果的影响;在此基础上采用四种湍流模型,计算了船舶在不同水深吃水比情况下作定常低速横向运动时的粘性流场和横向水动力,并将计算结果与文献[5]的试验结果及计算结果进行了比较,确定了数值模拟船舶低速横向运动粘性流场的有效的湍流模型。比较结果表明,本文的方法在计算精度上能满足工程实用的要求,本文采用的RNG k-ε、R kε和SST k-ω模型对横向力的计算结果在精度和误差一致性上都要优于文献[5]的计算结果,其中RNG k-ε模型在各种水深情况下相对于试验值的误差较另外两种湍流模型更优,因此可以认为RNG k-ε模型更适合于船舶低速横向运动时的水动力计算。

由于本文是以标准Wigley数学船型为研究对象,其首尾形状关于船舯剖面是完全对称的,相比于真实船型的首尾不对称,计算没有考虑到沿船长不对称横向水动力产生的首摇力矩,下一步的工作将对真实船型进行相关研究。
[1]Cura Hochbaum A.Computation of the turbulent flow around a ship model in steady turn and in steady oblique motion[C]//Proc.of the 22nd Symposium on Naval Hydrodynamics.Washington D.C.,USA,1998:550-567.
[2]Kenichi Kume,Jun Hasegawa,Yoshiaki Tsukada,et al.Measurements of hydrodynamic forces,surface pressure and wake for obliquely towed KVLCC2M model and uncertainty analysis[C]//Proc.of CFD Workshop Tokyo 2005.Tokyo,Japan,2005:604-611.
[3]邱 磊.船舶操纵相关粘性流及水动力计算[D].武汉:武汉理工大学,2003.
[4]Chen Hammn-Ching,Chen Miaomou,Davis D A.Numerical simulation of transient flows induced by a berthing ship[J].International Journal of Offshore and Polar Engineering,1997,7(4):277-284.
[5]Lee Yun-Sok,Yasuyuki Toda,Hiroyuki Sadakane.The prediction of hydrodynamic forces acting on ship hull undergoing lateral berthing maneuver in shallow water[C]//Proc.of MARSIM’03.Kanazawa,Japan,2003,RC-19-1-7.
[6]Antonio Pinto Heredero,Fred Stern.URANS and DES for Wigley hull at Extreme Drift Angel[D].Des Moines,USA:Masters thesis of the University of Iowa,2005.
Computation of the viscous hydrodynamic forces on a berthing ship in shallow water
WANG Hua-ming1,ZOU Zao-jian2,TIAN Xi-min3,HUANG Yong-sheng1,
(1 School of Naval Architecture and Civil Engineering,Zhejiang Ocean University,Zhoushan 316000,China;2 School of Naval Architecture,Ocean and Civil Engineering,Shanghai Jiao Tong University,Shanghai 200030,China;3 Marine Design and Research Insititute of China,Shanghai 200011,China)
Study on the ship’s lateral motion at low speed in shallow water is significant for investigating the ship performance during berthing when a ship usually moves laterally at low speed.In this paper,the viscous flow field and hydrodynamic force acting on a standard Wigley hull moving laterally in shallow water are calculated.Different computational regions,grid numbers and turbulent models are selected to find an exact and stable numerical solution.The numerical results are compared with the experiment results and other calculated results published in literatures,and an effective numerical method for simulation of the viscous flow around a ship in berthing motion at low-speed is established.
ship berthing;numerical simulation;shallow water;lateral hydrodynamic force
U661.33
A
1007-7294(2010)07-0723-09
2010-03-23
国家自然科学基金项目(10572094);上海市自然科学基金项目(06ZR14050)
王化明(1979-),男,博士,浙江海洋学院船舶与建筑工程学院讲师。