基于嵌入式目标模块的太阳能LED照明控制系统研究
2010-06-04赵争鸣袁立强
陈 剑,赵争鸣,袁立强
(清华大学电机系电力系统国家重点实验室,北京 100084)
基于嵌入式目标模块的太阳能LED照明控制系统研究
陈 剑,赵争鸣,袁立强
(清华大学电机系电力系统国家重点实验室,北京 100084)
太阳能LED照明系统作为新型照明方式,不仅具有独立光伏照明系统的诸多优点,如清洁无污染、无需长距离输电导线等,还具有LED照明的发光效率高、光线柔和、光伏电池设计容量小等诸多优势。但系统需实现最大功率点跟踪(MPPT)控制、LED非线性负载放电控制和蓄电池充放电控制等功能,对控制具有较高要求。本文对控制系统要求进行分析,分别进行了MPPT、充电策略和LED放电控制的研究,并采用MATLAB/Simulink对主电路和控制系统进行仿真。基于仿真模型,采用嵌入式目标模块eZdsp生成TSM320F2812 DSP控制程序,对仿真模型进行快速转化,并在硬件平台对具体控制系统进行实现。系统具有动态响应快、启动电流平滑、稳态精度高等优点,从而得出适合太阳能LED照明系统的控制方法。
嵌入式目标模块;最大功率点跟踪;LED照明
1 引言
太阳能作为重要的新能源,具有清洁无污染、储量巨大、便于利用等优点;LED(发光二极管)照明系统具有寿命长、发光效率高等优点,也开始广泛应用于照明;太阳能LED照明系统集中了太阳能和LED的诸多优点,具有很好的市场前景。但其具有自身的缺陷:太阳能电池板输出伏安特性(V-I)曲线为非线性,只有工作在特定电压下才能输出最大功率,需要进行最大功率点跟踪(MPPT)控制;LED灯的伏安特性曲线近似为指数函数,因此对控制精度要求较高,否则容易损坏;蓄电池作为储能元件,需要可靠合理的充放电管理策略,才能延长其使用寿命。
本文根据上述问题,分别进行了MPPT控制研究、LED恒流控制研究和蓄电池充放电策略研究,采用MATLAB/Simulink进行系统主电路和控制算法综合仿真,得出较为理想的控制效果和控制参数,并对控制模型进行移植,利用Embedded Target for TI C2000 DSP嵌入式目标模块生成控制代码,由TMS320F2812 DSP进行实际系统控制,从而将仿真控制算法在实际系统中快速准确地实现。
2 系统控制要求分析与实现方法
太阳能LED照明系统包括光伏阵列、蓄电池、LED阵列灯和控制器几个部分。其控制器需实现整个系统充放电控制,对光伏阵列、蓄电池和LED灯工作状态进行实时检测,并实现充放电切换过程,既要保证光伏阵列最大功率输出,又要保证蓄电池使用寿命和LED灯安全工作。
2.1 MPPT控制的优化实现
目前MPPT控制研究较多,方法各异,控制效果各不相同,因此需要选取一种适合实际系统的合理方法。根据文献[1-3],选取适合小型独立系统的干扰观测法,并对其进行改进,完全可以满足控制需要。
传统的干扰观测法在光伏系统中应用最为广泛,能快速准确进行MPPT控制,但存在最大功率点附近反复振荡和特殊情况下误判断的问题,如光照强度剧烈变化[3,4]。
通过对传统方法的扰动步长Δs进行动态调整,即当外界条件变化剧烈时,适当加大扰动步长和控制周期,当系统运行接近稳态时,减小扰动步长和控制周期,可提高系统动稳态精度,有效避免传统方法的反复振荡。
同时,通过变步长方法,可以在检测到功率变化值ΔP较大时,锁定扰动步长为0,当系统处于相对稳定之后继续最大功率点搜索,即可有效解决传统方法的误判断现象。
2.2 LED灯恒流控制的优化实现
LED灯负载伏安特性曲线近似为一指数函数,在额定功率附近di/dU比值非常大,对系统控制要求较高[5],若采用单环控制,系统阶数低,LED负载电压电流动态响应和稳态精度不可兼顾,很难保证效果。为此根据实际控制系统需要,建立恒电流双环控制模型框图如图1所示:
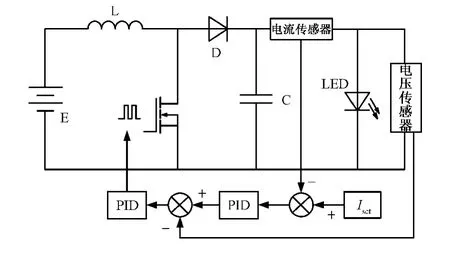
图1 LED恒电流双环控制模型框图Fig.1 Dual-loop constant current control model for LED lighting
系统通过Iset设置运行参考电流,控制系统由电压电流传感器获得采样数据,经系统框图算法最终输出PWM脉冲作用于开关器件MOSFET门极以实现系统控制。
采用恒电流双环控制,提高了系统阶数,并且以参考电流为最终控制对象,有利于提高LED负载电流平滑稳定。
2.3 系统充放电策略选取
蓄电池在使用过程中,充放电策略对其寿命具有重要影响[6,7]。由于系统需要尽可能最大功率输出并储存以充分利用光伏阵列,因此充电策略需要既满足MPPT需求,也能解决蓄电池寿命问题。选取以下充电策略可以满足要求:
MPPT充电控制:在电池端电压低于设定值Vset时,采用MPPT控制进行最大功率充电,尽可能保证光伏阵列输出最大功率,提高光伏阵列利用率;
限功率充电控制:当蓄电池端电压达到Vset时,采用限功率充电控制,设定充电功率P≤Pset,此时充电电流iP小于MPPT充电电流iMPP,系统不再进行MPPT控制;
浮充控制:当蓄电池端电压接近饱和电压Vf时,系统进一步降低充电电流,严格控制充电电压Vc=Vf,进入小电流浮充阶段,最终完成整个充电过程。
2.4 基于嵌入式目标模块的控制程序生成
根据MATLAB/Simulink仿真模型,利用Simulink中Embedded Target for TI C2000模块,对控制算法进行移植,并加入eZdsp模块对DSP资源进行配置,即可快速编译生成控制系统中TMS320F2812 DSP的控制代码。由于采用了算法移植,使仿真结果能快速准确地在实际系统中得到验证,并依据仿真结果可对控制算法进行快速修改,大大提高效率[8]。
3 仿真和实验
在MATLAB/Simulink仿真中,建立如图2的主电路模型,主要由Buck主电路、传感器和光伏阵列模型组成。
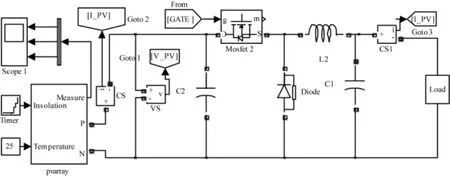
图2 MATLAB/Simulink下的充电主电路模型Fig.2 MATLAB/Simulink model for main circuit of battery charging
建立变步长的改进干扰观测法MPPT控制的Simulink模型如图3所示:
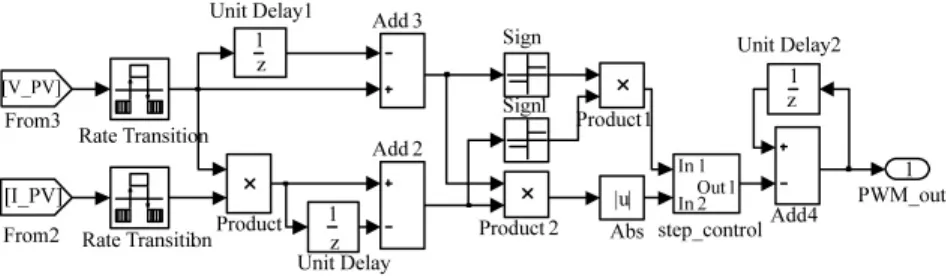
图3 变步长的改进干扰观测法控制模型Fig.3 Blocks for mutable step perturb and observe MPPT algorithms
根据图2和图3模型进行MPPT控制仿真,设置额定功率300W的光伏阵列模型在不同时刻改变光照强度分别为 900、800、700、1000W/m2作为动态光照扰动,环境温度设定为25℃,仿真波形如图 4所示。
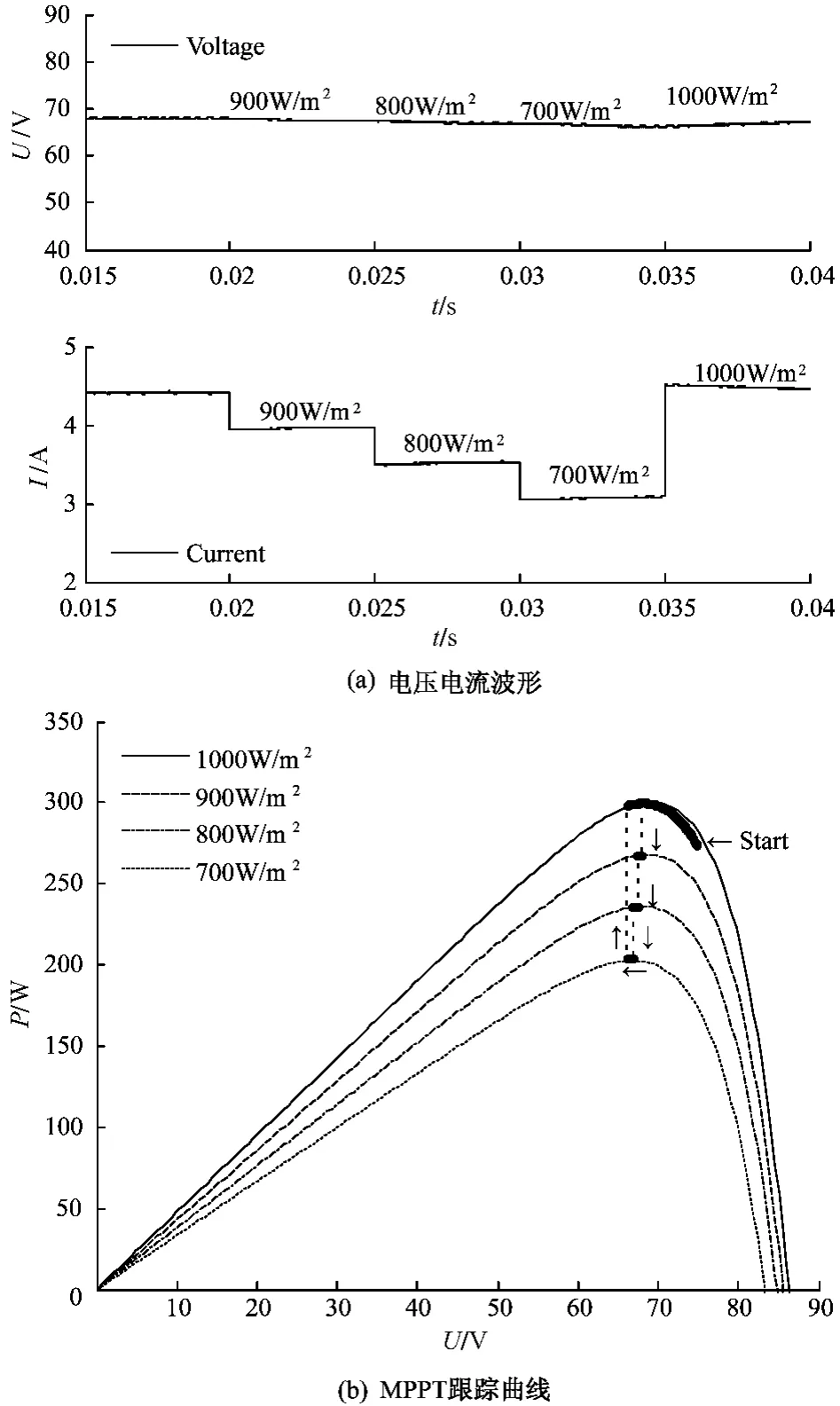
图4 MPPT仿真波形图Fig.4 MPPT simulation waveforms
图4(a)中,在光照强度快速变化时,光伏阵列输出电压只有微弱波动,而输出电流变化明显,与理想MPPT跟踪效果完全吻合;电流波形动态响应时间短、稳态波动小,体现出很好的控制性能。图4(b)中,系统从开始运行经过一段时间即稳定运行在最大功率点附近,当光照强度剧烈变化时,能快速准确运行在新的最大功率点处;波形中同一光照强度下的运行点变化范围较小,充分解决了干扰观测法在最大功率点附近反复振荡扰动和光照剧烈变化出现误判断的问题。
基于Simulink建立如图5的LED负载放电电路模型,系统中 VS1、VS2、CS1、CS2 分别为电压、电流传感器,电路将蓄电池经Boost电路升压后接LED负载,控制程序利用图1所示控制算法根据采样数据最终输出PWM脉宽信号作用于MOSFET以实现系统控制。
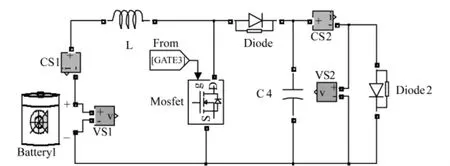
图5 LED为负载的主电路模型Fig.5 Battery discharging main circuit for LEDs
设置LED启动参考电流为0.5A,在0.6s时改变参考电流为0.6A进行系统动稳态性能仿真,其负载电压电流波形如图6所示。
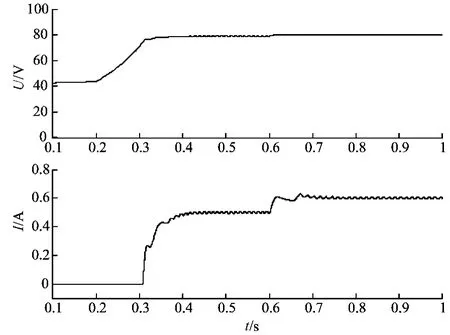
图6 LED电压电流仿真曲线Fig.6 Voltage and current simulation waveforms of LEDs
图6中,LED启动电流不带有尖峰,可充分保护其免遭因尖峰电压导致瞬间过流而造成的损坏。在改变参考电流后,输出电流波形超调很小,动态响应相对较快,稳态精度较高。
根据以上模型,采用300W光伏电池、蓄电池组和50W LED灯构建实际系统,建立系统主电路和TMS320F2812控制板,采用嵌入式目标模块生成控制代码[8],最终由 DSP实现系统控制,系统 MPPT运行和LED负载启动时电压电流实验波形如图7所示。
图7(a)的波形为在光照强度发生剧烈变化时光伏阵列输出电压电流实验波形。波形在光照发生剧烈变化时,光伏阵列输出电压微弱变化,但电流发生明显变化,充分体现MPPT控制算法能快速准确地进行控制,动态响应较快,稳态误差较小。
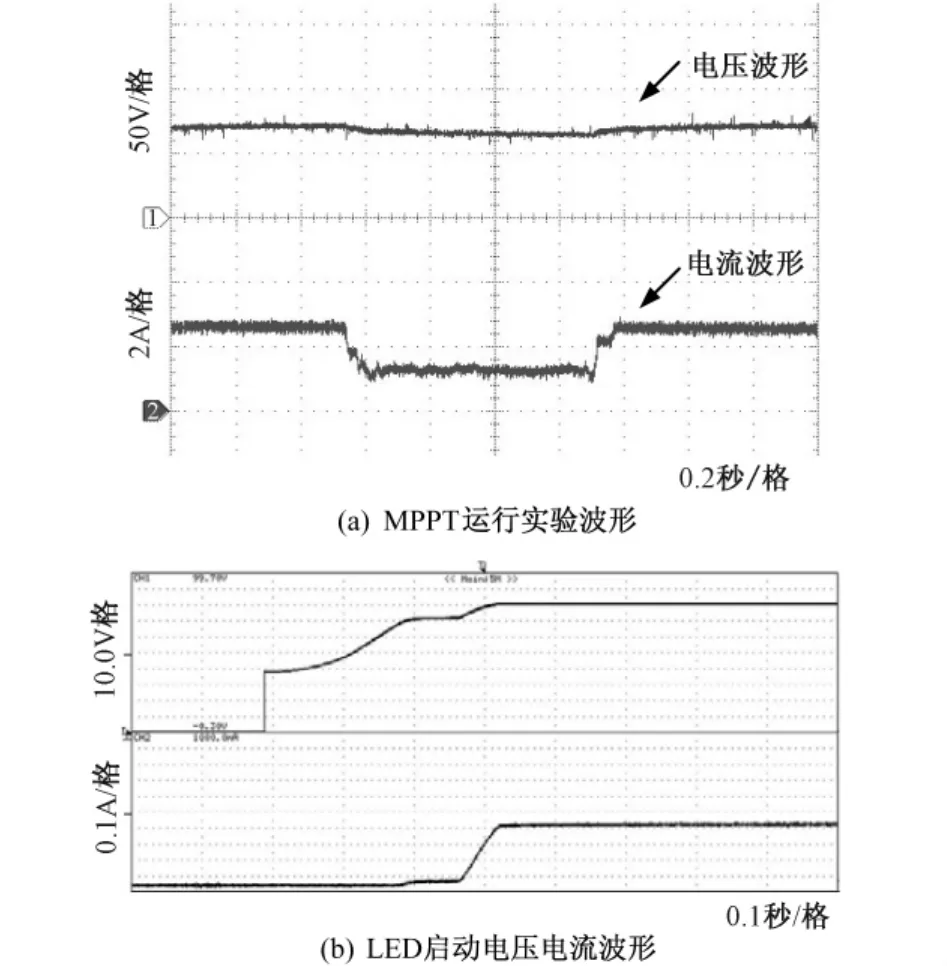
图7 控制系统实验波形Fig.7 Experimental waveforms of control system
LED灯负载属于半导体器件,瞬间过压或过流就会导致损毁,因此实验中控制好启动过程,尽可能减小电压尖峰、电流毛刺尤为重要。图7(b)中设定LED灯启动时参考电流值为0.4A,波形显示LED负载在启动时平滑稳定,没有电压尖峰和电流毛刺产生,可保证LED灯安全稳定运行,控制性能较为理想。
基于以上研究,太阳能LED照明控制器实际装置如图8所示。
4 结论
1)建立了太阳能LED照明控制系统的主电路MATLAB/Simulink仿真模型,在仿真结果基础上实现了太阳能LED照明系统控制器。
2)对变步长的改进干扰观测法进行仿真,并在实际系统中加以实现,由图4可知系统MPPT控制中,光照突变时动态响应速度快,稳态运行电压电流波动小、跟踪曲线吻合好,体现稳态精度高的特点,有效解决了传统干扰观测法的频繁扰动和误判断问题;建立了LED灯恒电流双环控制模型,有效解决了LED负载因过流而瞬间损坏的问题,控制精度较高,动稳态性能较理想。
3)基于MATLAB/Simulink嵌入式目标模块eZdsp进行控制程序快速生成,将仿真模型和参数快速应用于太阳能LED照明控制系统,提高了系统开发的快速性、准确性,为基于DSP控制系统的实现与开发提供了一种快速途径。
References):
[1]Salas V,Olías E,Barrado A,et al.Review of the maximum power point tracking algorithms for stand-alone photovoltaic systems[J].Solar Energy Materials& Solar Cells,2006,90(11):1555-1578.
[2]Desai H P,Patel H K.Maximum power point algorithm in PV generation:an overview[A].IEEE PEDS'07[C].2007.624-630.
[3]Femia N,Petrone G,Spagnuolo G,et al.Perturb and observe MPPT technique robustness improved[A].IEEE International Symposium on Industrial Electronics[C].2004.845-850.
[4]Femia N,Petrone G,Spagnuolo G,et al.Optimizing sampling rate of P&O MPPT technique[J].IEEE Trans.on Aerospace and Electronic Systems,2007,43(3):934-950.
[5]冯博,赵争鸣,张颖超,等 (Feng Bo,Zhao Zhengming,Zhang Yinchao,et al.).基于滑模控制的LED恒流电源研究 (Research on constant current source for LED based on sliding mode control)[J].电工电能新技术(Adv.Tech.of Elec.Eng.& Energy),2008,27(4):9-13.
[6]Wu Libo,Zhao Zhengming,Liu Jianzheng,et al.Implementation of a stand-alone photovoltaic lighting system with maximum power point tracking and high pressure sodium lamp[A].IEEE Power Electronics and Drive Systems[C].2003.1570-1573.
[7]吴理博,赵争鸣,刘建政,等 (Wu Libo,Zhao Zhengming,Liu Jianzheng,et al.).独立光伏照明系统中的能量管理控制(A novel energy management and control for stand-alone photovoltaic lighting system)[J].中国电机工程学报 (Proc.CSEE),2005,25(22):68-72.
[8]Mathworks Corp.Embedded Target for TI C2000(tm)DSP [Z].MATLAB R2007b Helping Files system,2007.
Implementation of solar LED lighting control system based on embedded target modules
CHEN Jian,ZHAO Zheng-ming,YUAN Li-qiang
(State Key Lab of Power Systems,Dept.of Elec.Eng.,Tsinghua University,Beijing 100084,China)
Solar LED lighting system as the new lighting technology has many advantages,such as green power usage,comfortable feeling and high efficiency.However,the complex and high performance control requirements challenged the control system,such as maximum power point tracking(MPPT)control,LED nonlinear load control and battery charging strategy selection.In this paper,the control system demands are analyzed.The MPPT control,battery charging strategy and LED load control research are achieved and simulations based on MATLAB/Simulink are accomplished.By using the simulation modules and eZdsp embedded target modules,the programs are generated for TMS320F2812 DSP's control.High performance experiments are also achieved for the LED lighting system,such as fast dynamic response,smooth starting current and high precision for steady-state.This paper also sets up an ideal control module of LED lighting system.The experimental programs generation based eZdsp provides an efficient realization for the DSP control system.
embedded target modules;maximum power point track;LED lighting
TM923.34
A
1003-3076(2010)03-0076-05
2009-09-14
国家自然科学基金资助项目( 50737002;50707015)
陈 剑(1984-),男,浙江籍,硕士研究生,研究方向为电力电子和太阳能光伏发电技术;
赵争鸣(1959-),男,湖南籍,教授,博士,研究方向为太阳能光伏发电、电力电子与电机集成系统。