双侧电传动履带车辆小半径转向控制策略
2010-05-30陈泽宇张承宁李军求武小花
陈泽宇 张承宁 李军求 武小花
北京理工大学,北京,100081
0 引言
在转向性能方面,履带车辆不如轮式车辆,这是履带车辆的一个缺点[1],主要体现在转向过程中功率需求大、平稳性差且转向轨迹可控性差。但是履带车辆可以实现小半径的转向,最小转向半径可以小于履带中心距的1/2,甚至可以实现原地转向,而轮式车辆的最小转向半径则远远大于车宽,正是这一特点,使得履带车辆在一些农林机械、矿山机械以及军用领域中显得更加适用[2-4],因为它可以在矿山、农田、丛林等特殊狭窄环境下进行灵活转向,而轮式车辆很难实现。
为了使履带车辆更好地发挥这一优势,并且在电传动履带车辆[5]上得以应用,本文针对双侧电传动履带车辆,进行理论分析和系统仿真,对小半径转向特性和控制策略展开研究。
1 双侧电传动履带车辆结构
电传动是目前车辆发展的趋势,已经在许多领域引起了广泛重视[6],本文针对双侧电传动履带车辆[7]的小半径转向问题展开研究。双侧电传动结构是目前电传动履带车辆中最常用的一种结构形式,它取消了两侧驱动轮之间的横向机械连接,通过综合控制器独立地控制两侧的电机驱动系统,将电能转化为机械能驱动两侧履带行驶。该结构的主要优点是结构简单,布置灵活,便于实现,其系统结构如图1所示。

图1 双侧电传动结构简图
2 小半径转向理论
根据相对转向半径,可以将履带车辆的转向工况分为三类:小半径转向、再生制动转向和修正转向。其中小半径转向是指转向半径不大于履带中心距的0.5倍的转向工况,其特点是两侧电机都工作在驱动状态,外侧电机正向驱动,内侧电机反向驱动,动力学模型如图2所示。
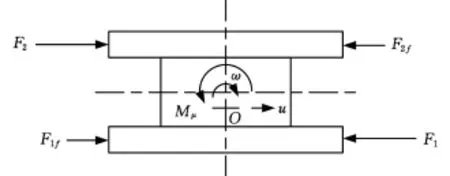
图2 转向受力图
图2 中,F2为转向过程中外侧履带的驱动力,N;F1为内侧履带的驱动力,N;F 1f与F 2f分别为内外侧履带的滚动阻力,N;Mμ为转向阻力矩,N◦m;ω为转向角速度,rad/s;u为车辆纵向速度,m/s;O为转向中心。
由于小半径转向的速度不高,因此忽略转向时向心加速度产生的影响,假设履带车辆垂直载荷均匀分布,且不计转向过程中的滑转、滑移,根据履带车辆转向动力学[8],可建立平衡方程:
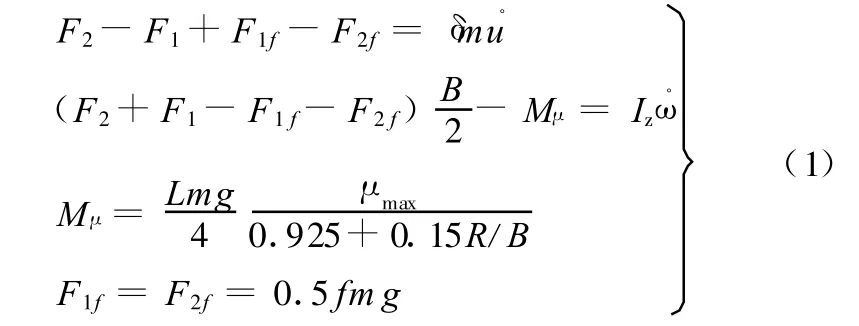
式中,m为整车质量,kg;B为两侧履带中心距,m;L为履带接地长度,m;δ为旋转质量换算系数;Iz为转向时的整车转动惯量,kg◦m2;g为重力加速度,m/s2;μmax为0.5B转向时的最大转向阻力系数;R为转向半径,m;f为滚动阻力因数。
如果给两侧电机固定的力矩指令,对式(1)进行整理,可得转向半径为

式中,u0为转向时的初始车速,m/s;t为积分时间,s。
对于原地起步的小半径转向,u0=0,根据式(1)可知Mμ为仅与转向半径R有关的函数,分母中的积分视作被积函数原函数与积分时间的乘积,并约去分子与分母中的t,仅剩R一个变量,可知当内外侧履带作用力F 1和F 2一定时,转向半径R是稳定的值。通过迭代算法,即可得到任意F1和F2时的转向半径R。对式(2)进行分析,可以得到一个结论:转向半径R随(F2-F1)的增大而增大,随(F1+F2)的增大而减小。
上述固定两侧履带驱动力的情况下的小半径转向特性,是在假设两侧履带驱动力不受限制的前提下得到的,但是实际上驱动力要受地面附着和两侧电机的功率限制,而且传动效率也会影响两侧驱动力,因此有必要将电机特性与车辆动力学结合起来进行分析。
假设转向前的车辆初速度为0,两组电机力矩指令输入信号如表1所示,表1中负号表示电机反转驱动,主要仿真参数为:m=4000kg,L=2.0m,B=1.4m,f=0.1,μmax=0.8,电机峰值功率取65k W,两组输入信号下的仿真结果如图3、图 4 所示。

表1 电机力矩指令
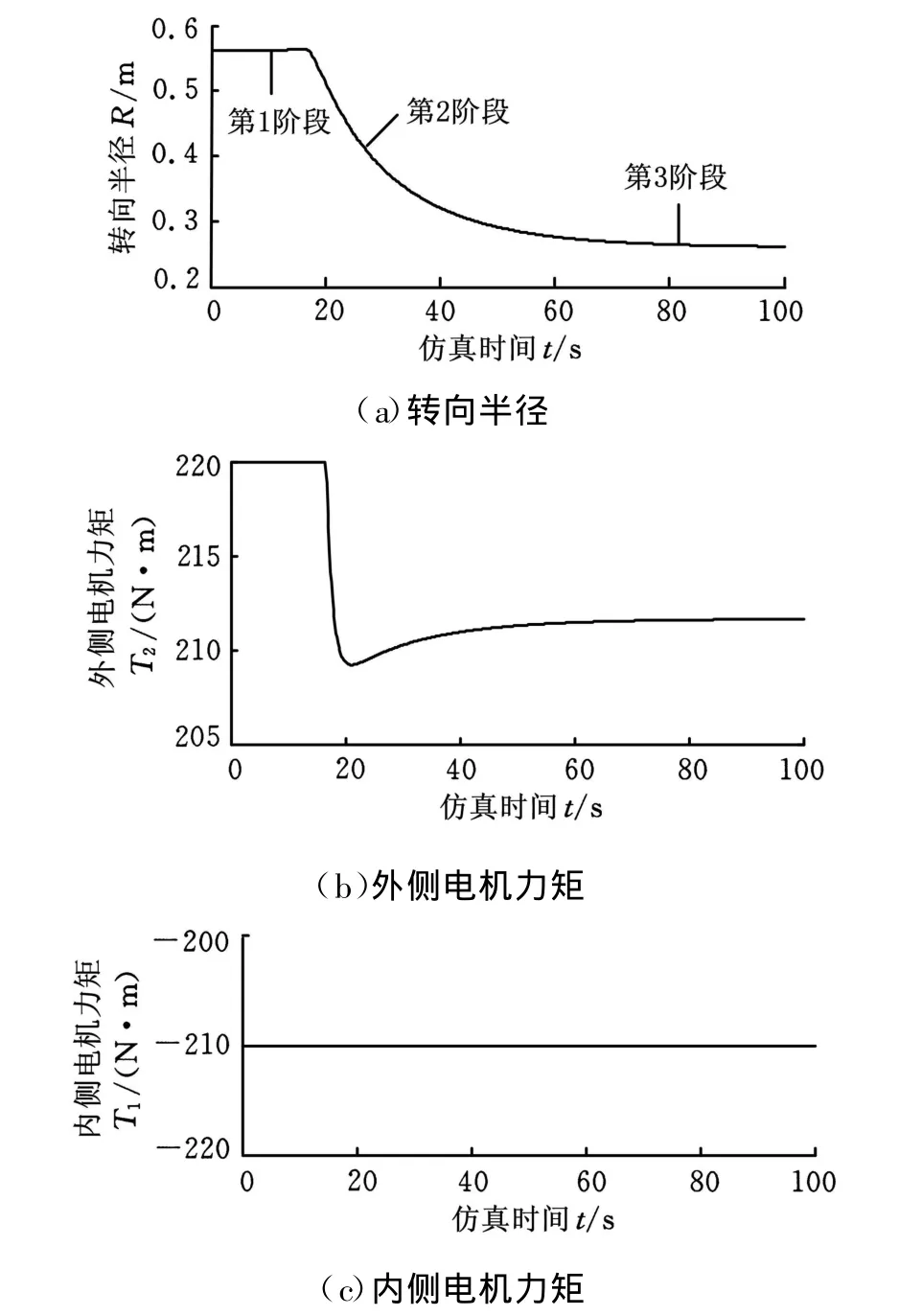
图3 第1组力矩输入下的仿真结果
对仿真结果进行分析,从转向半径的变化可以看出,在给定两侧电机驱动力的情况下,小半径转向工况分为三个阶段:
第1阶段:转向半径R是稳定的,但是转向角速度在迅速增加,根据转向角速度、车速和转向半径的关系可知车速也在迅速增加,即此阶段车辆沿固定半径圆弧的转向轨迹越转越快。
第2阶段:随着速度的增加,外侧电机达到峰值功率,转向进入第2阶段,外侧履带速度继续增加,外侧电机力矩沿外特性曲线下降,转向半径相应减小,车速与角速度继续增加,但是加速度减小。
第3阶段:随着外侧电机力矩的减小,内外侧履带驱动力逐渐达到相等,车辆重新达到平衡状态,进入第3阶段,车速和转向角速度固定不变,转向半径重新达到稳定值,转向半径的数值受内侧履带的驱动力大小而决定,在这一阶段车辆沿一个固定半径的圆弧轨迹匀速转动。
考虑到在行进中进行小半径转向的可能性,针对第 2组力矩输入的情况,给定初速度为0.1m/s进行仿真并与原地起步的仿真结果进行对比,行进过程中的小半径转向仿真如图5所示。
通过图4a与图5的比较可知,行进中的小半径转向与原地起步转向相比,区别仅在第1阶段,行进中小半径转向的转向半径由无穷大逐渐降低并达到稳定,之后的第2阶段、第3阶段与原地起步的小半径转向的变化过程完全相同。
实际转向过程中,为了实现良好的转向性能,转向半径必须稳定,由上述仿真分析可知:在设计小半径转向策略时,对于原地起步的小半径转向,应该将车辆控制在转向仿真过程的第1阶段以实现稳定的转向半径,同时进行起步加速;而对于行进过程中的小半径转向,则应该将车辆控制在仿真过程的第3阶段。
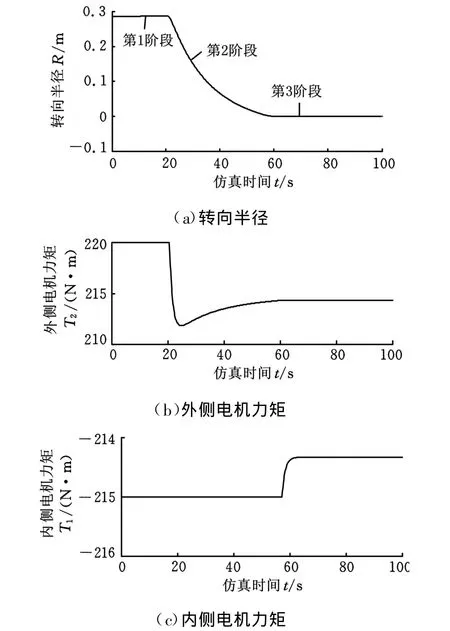
图4 第2组力矩输入下的仿真结果

图5 行进过程中的小半径转向仿真
3 转向控制策略设计
上述分析结果为控制策略的建立提供了理论依据。本文研究的小半径转向控制策略包括两部分:一是原地起步的情况下的转向策略;二是在带有一个小的初速度的情况下进行小半径转向的控制策略。
首先讨论原地起步的情况,根据式(2),将初速度为0这一条件代入可得

由于小半径转向时阻力较大,因此采用的设计思路为转向时外侧履带发挥最大力矩,通过调节内侧履带力矩来实现不同的转向半径。在小半径转向模式下,最小转向半径为零,即原地转向,而最大转向半径是0.5B,如果超出这个范围,就不属于小半径转向的讨论范围了,现对这两种临界情况加以分析。
当R=0时对应内侧电机力矩的最小值,结合式(3)可得内侧驱动力上限:

当R=0.5B时对应内侧电机力矩最小值,结合式(3)可得
对方向盘输入做如下解释:定义方向盘最大转角为±αmax,将其解释为左右两个方向的原地中心转向;定义方向盘最小有效转角为 ±αmin,并将其解释为左右两个方向的0.5B转向,而对于|α|<αmin的情况,认为是方向盘的自由行程,解释为车辆的直线行驶。
将驾驶员方向盘转角量化为[-50,50],其中[-5,5]的部分对应为自由行程,原地起步的小半径转向控制策略可以描述为

式中,T1_max、T1_min为依据式(4)~式(6)确定的内侧电机力矩上下限,N◦m;rz为履带主动轮半径,m;i为从电机到履带主动轮的传动比;η1、η2分别为内外侧动力支路传动效率;T1_com、T2_com分别为内外侧电机的目标力矩,N◦m;λA为加速踏板信号;α为方向盘信号;αmax、αmin分别为方向盘最大转角信号与自由行程转角信号。
由于车辆左转与右转情况完全对称,所以只讨论α为正的情况,即车辆向右进行小半径转向的情况。根据上述分析结果,行进中的小半径转向应该控制在转向半径仿真曲线的第3阶段,在这个阶段,转向半径与车速都是稳定不变的,因此内外侧履带作用力应该相等,控制策略可以描述为

式中,Δu为车辆纵向加速度反馈信号,m/s2;fPID(Δu)为PID修正值,N◦m,其作用是根据加速度反馈对力矩控制策略的输出结果进行调整。
4 系统仿真分析
为了对上述控制策略进行仿真验证,观察转向的控制效果,在MATLAB/Simulink环境中建立仿真模型。该仿真模型包括5个主要组成部分:驾驶员输入信号、控制策略仿真模型、电机驱动系统模型、履带车辆动力学模型以及输出显示模块等,如图6所示。

图6 双侧电传动履带车辆小半径转向仿真模型
控制策略模型在Simulink/Stateflow中建立,PID修正子模型如图7所示。图7中,Kp为比例系数,K i为积分系数,K d为微分系数。转向过程中的车辆动力学和运动学仿真子模型分别如图8、图9所示。
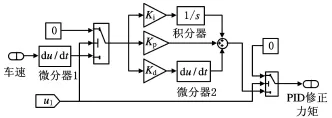
图7 PID修正子模型
转向运动学轨迹方程为
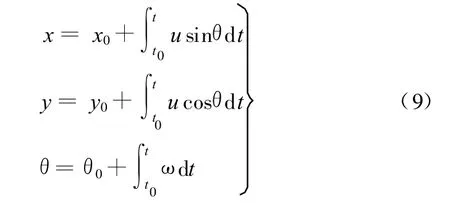
式中,x、y为坐标值;x0、y0为初始坐标值;t0为初始时间;θ为运动轨迹偏离直驶的角度,rad;θ0为θ在t0时刻的初始值,rad。
对方向盘转角为 15°、初速度为 0.2m/s和方向盘转角为20°、初速度为0两种情况进行仿真,仿真结果如图10、图11所示。
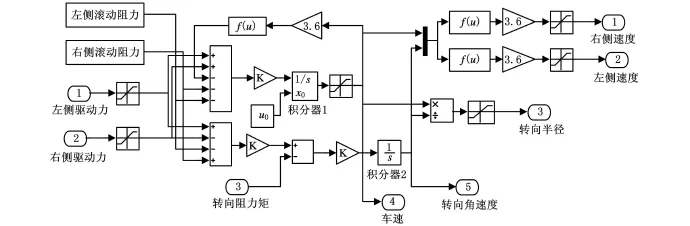
图8 动力学子模型
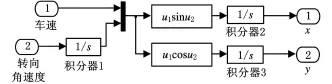
图9 运动学子模型
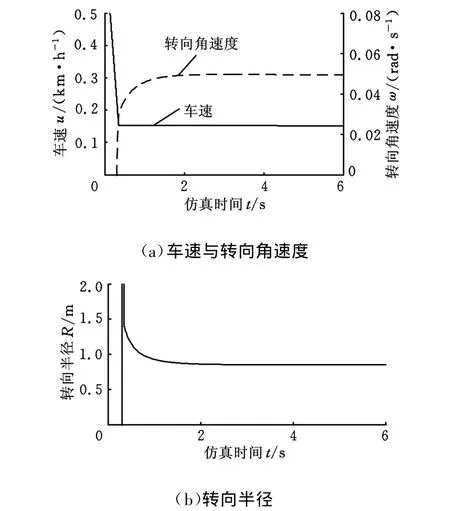
图10 方向盘15°初速度0.2m/s的仿真结果
由图10、图11可以看出,带有初速度的小半径转向在起始阶段有一个短暂的速度下降,之后便进入小半径转向阶段,速度和角速度都进入稳态,转向半径很快达到稳定;而原地起步的小半径转向在力矩分配策略的作用下,车速和转向角速度一起增长,转向半径稳定,转向轨迹是一条规则的圆弧。
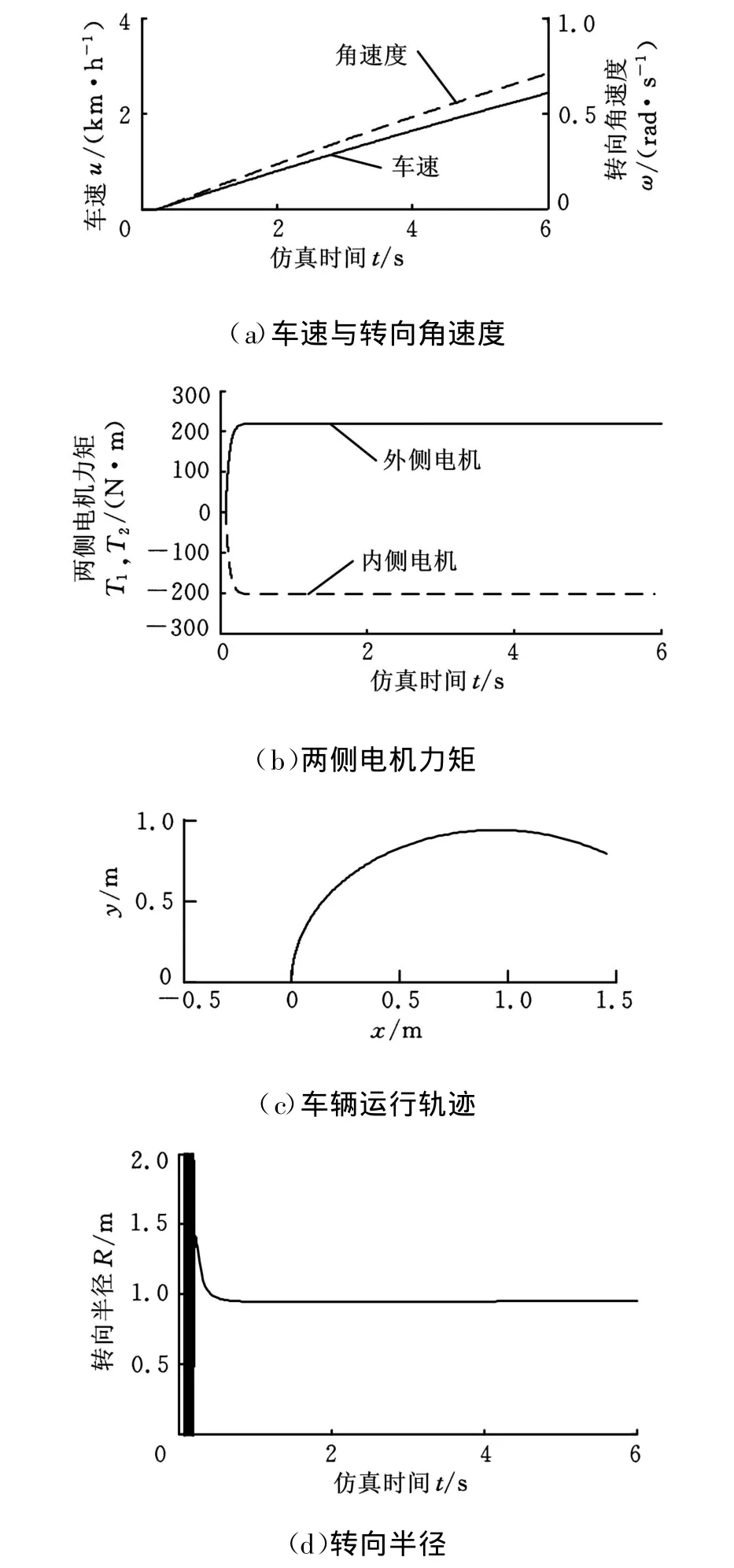
图11 方向盘20°初速度0的仿真结果
5 结论
(1)对于原地起步的小半径转向工况,在两侧履带驱动力固定时,转向半径是稳定的,并且随两侧履带驱动力之差的增大而增大,随两侧履带驱动力之和的增大而减小。
(2)在进行小半径转向时,转向特性分三个阶段:第1阶段,转向开始时转向半径稳定,但车速和转向角速度迅速增加;第2阶段,外侧电机达到峰值功率,转矩开始沿外特性曲线下降,这一阶段转向半径逐渐减小,车速与转向角速度缓慢增加;第3阶段,转向半径再次达到稳定,车速和转向角速度不再变化,转向进入稳态。
(3)有初速的小半径转向工况在转向初期转向半径从无穷大迅速降低并达到稳定值,之后的变化特性便与原地起步转向完全相同。
(4)在仿真分析的基础上,设计了小半径转向控制策略,分配了两侧电机的目标力矩,并对分配结果进行了 PID修正。通过 MATLAB/Simulink进行了仿真,结果表明转向策略是可行的。
[1] 汪明德,赵毓芹,祝嘉光.坦克行驶原理[M].北京:国防工业出版社,1983.
[2] 杨磊,马彪,李和言,等.静液驱动履带车辆转矩控制方法理论研究[J].中国机械工程,2009,20(21):2-7.
[3] North Atlantic Treaty Organisation.All Electric Combat Vehicles for Future Applications[R].RTO Technical Report,2004,TR-AVT-047.
[4] 宋海军,高连华,程军伟.履带车辆中心转向模型研究[J].装甲兵工程学院学报,2007,21(2):55-58.
[5] 邹渊,孙逢春,张承宁.电传动履带车辆双侧驱动转矩调节控制策略[J].兵工学报,2007,28(12):1409-1414.
[6] Ogorkiewicz R M.Electric Drives Take New Forms[J].Jane's International Defense Review,1999,1(1):307-310.
[7] Shafer G.Electric Drive M113 Vehicle Refurbishment Pro-ject:Sacrament Electric Transportation Consortium RA93-23program,ADA322403[R].Santa Clara:FMC Corporation,1997.
[8] 孙逢春,张承宁.装甲车辆混合动力电传动技术[M].北京:国防工业出版社,2008.
