AGC模式下超临界机组协调控制策略的完善及应用
2010-05-29卓鲁锋
苏 烨,张 鹏,卓鲁锋,陈 列
(1.浙江省电力试验研究院,杭州 310014; 2.浙能乐清发电有限责任公司,浙江 乐清 325609)
我国新建机组大部分是超临界或超超临界机组,容量从600 MW到1000 MW不等。随着电网容量的不断扩大,电网对供电质量的要求也越来越高,要求电厂机组能满足AGC控制的要求,具有较强的调峰能力和响应速度,对机组AGC控制功能及品质的考核也越来越严格。
机组AGC功能的正常投运建立在机组协调控制系统具有良好的控制品质基础上。根据超临界机组的特点优化协调控制系统策略,对机组安全稳定运行和满足AGC投运条件很有意义。
1 原协调控制系统存在的问题
浙能乐清发电厂一期新建机组为2台600 MW超临界燃煤机组,锅炉为上海锅炉厂制造的超临界参数变压运行螺旋管圈直流炉,单炉膛、四角切圆燃烧、全悬吊结构Π型锅炉,采用定-滑-定运行方式。汽机为上海汽轮机有限公司制造的超临界、一次中间再热、单轴、三缸四排汽、高中压合缸、反动凝汽式汽轮机。仪控采用北京ABB Bailey控制有限公司的Symphony控制系统。
机组调试期间发现的问题主要有:
(1)机组锅炉蓄热量很小,不同的负荷段蓄热能力也不一样,给水量对机组参数和稳定性影响明显。直吹式制粉系统的大滞后特性不利于锅炉和汽机之间的协调。
(2)机组正常运行过程中,由于锅炉蓄热小和纯迟延惯性大的强耦合性特点,使机组负荷大范围变化时负荷响应速度较快,而负荷小范围变化时响应速度较慢。如果小范围变化满足响应速度快的要求,那么大范围变化时会出现负荷超调过大,机组的安全稳定性能受到一定影响。
(3)机组对给水量和煤量的变化反应灵敏,给水量或煤量的变化对机组参数会产生较大影响,燃水比在不同工况和负荷段的匹配是机组安全稳定运行的关键因素之一。
(4)负荷变化初始响应慢,如果单纯加大燃料主控动态前馈量,可能使机组负荷变化时超调,主要参数不稳定。
基于以上情况,在CCS策略设计和参数整定时,必须考虑燃水比的协调,保证燃烧率和给水量之间的平衡关系;另外一方面要考虑到机组蓄热小及纯迟延和大惯性强耦合性的特点,使协调控制系统能满足机组安全稳定要求的同时,满足AGC大、小负荷变化的快速响应要求。
2 CCS结构模型
负荷指令与各子系统控制指令之间存在线性关系,因此很多机组的协调控制系统采用直接指令平衡控制(direct instruction balance,DIB)。 DIB一般采用闭环校正和前馈指令相结合的方式,将单元机组协调控制指令送给锅炉主控、汽轮机主控、燃料主控和给水控制。直流锅炉的协调控制系统对象结构模型可简化为三输入三输出控制系统,输入为燃料量M、汽轮机调门开度μT和给水指令W,输出为机前压力PT、机组负荷NE、分离器出口蒸汽温度θ或焓值H,相互之间存在着很强的耦合性。调节系统的汽机指令Mt和燃料指令M时域指令模型如下:
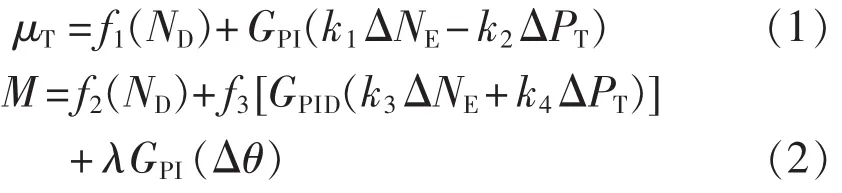
式中:ND为负荷指令;GPI、GPID为调节器算法;k1~k4为负荷—汽压分量的配比系数;f1(x)为汽轮机前馈函数;f2(x)为超前指令函数;f3(x)为煤水分配函数;λ为焓温选择系数。
以往整定协调控制系统时,一般整定前馈函数和PID参数,但是由于直流炉的蓄热较小,存在以下几个问题:
(1)初始负荷响应慢。
(2)AGC控制模式下,负荷指令小范围变化时负荷响应速度慢,而大范围变化时速度能满足要求。
(3)如果整定成负荷指令小范围变化时速度较快,那么大范围变化时可能会出现超调过大,机组参数不稳定。
(4)单独固定的前馈函数已不能很好地满足机组不同负荷段的控制要求,需要用新的控制回路予以完善。
当机组处于AGC控制模式时,电力调度中心对机组调节速率往往采取以下计算方式:

响应时间为实际功率超出响应死区的时间,一般死区设置为2 MW。进入目标区域时间为指令发出后实际功率和目标负荷达到允许偏差范围的时间,一般允许偏差也为2 MW。MCR为机组设计满发功率。该计算方式的问题是需要扣除响应时间,而超临界和超超临界机组的蓄热小等特性往往使初始响应慢,过了初始响应区域后,后期负荷变化速率快。随着电网的发展,对机组初始负荷响应能力的要求将有所提高,也会要求减小响应死区、降低响应时间或取消响应时间,对机组初始负荷响应速度和安全稳定经济运行的要求也会相应提高。
3 控制策略完善
3.1 汽机主控前馈
由于超临界直流炉蓄热小和制粉系统的纯迟延特性,依靠调整燃料主控前馈和PID参数不能很好满足机组在一定AGC速率下负荷小幅变动的要求。考虑到AGC考核要求和机组变负荷初期响应慢的特点,在汽机主控前馈回路增加一前馈回路,在变负荷初期牺牲一定的压力调节品质,以满足机组变负荷初期响应要求。逻辑如图1所示, 函数 f(x)跟随燃料量动态前馈量函数 f2(x)变化,当负荷指令变化时,燃料量动态前馈f2(x)起作用,f(x)同时作用到汽机前馈,直接对汽机调门进行调节。在整定f(x)函数时,需要考虑汽轮机的控制方式和参数整定情况。汽轮机调门控制分为单阀控制和顺序阀控制2种。当单阀控制时,有3个主汽调门参与进汽量的调节;顺序阀控制时,只有1个调门对进汽量进行调节,因此整定顺序阀控制的f(x)应比单阀控制时小。
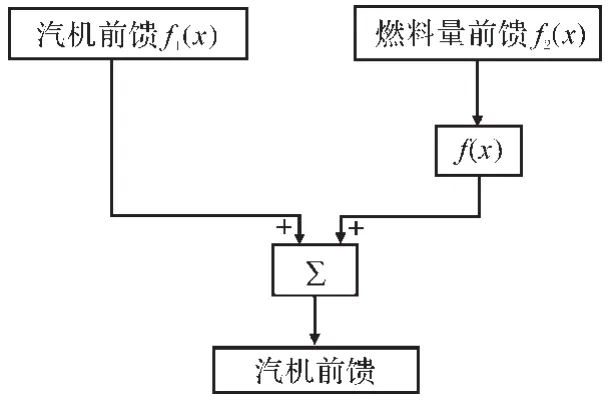
图1 优化后的汽机主控前馈
增加此控制回路的作用是为了提高变负荷时的初始负荷响应速度,对负荷指令进行快速响应,缓解超临界直流炉机组蓄热小、大惯性和大迟延的问题,以满足AGC控制方式下初始负荷响应的要求。特别是在AGC模式下的负荷指令小范围变动过程中,如600 MW机组变化20 MW负荷指令,如果以12 MW/min的速率变化,负荷指令从起作用到负荷指令到位时间只需要100 s,但是从指令变化到煤量变化及锅炉起作用的时间大概需要1 min左右,虽然在磨煤机一次风量调节系统中增加了微分超前环节,但还是不能克服机组蓄热小带来的问题,无法满足AGC模式下快速响应的要求。增加此回路后还能提高机组的一次调频能力,这点已在实际一次调频动作中得到证明。
3.2 燃料主控前馈
锅炉静态前馈是DIB协调控制的基本组成回路,通过记录不同负荷下相应的燃料量,得到锅炉的静态前馈参数。锅炉动态前馈是DIB协调控制的动态补偿回路,对机组实际响应负荷指令的速率和快速响应电网调度目标负荷具有根本性的作用。从原理来说,机组负荷指令的动态补偿信号主要是在机组负荷变动时补偿机组蓄热的减少,通过参数调整可以得到燃料量前馈f2(x)的参数。在负荷变动AGC试验中发现,单一的f2(x)函数还无法满足机组变负荷的需要。当负荷指令小范围变化时,机组响应慢,如果把f2(x)函数的参数放大,会使负荷指令大范围变动时负荷超调;如果负荷指令大范围变化时f2(x)参数满足要求,那么小负荷指令变化时响应很慢。因此,对燃料量动态前馈增加了能根据负荷偏差变化的动态可变前馈回路,如图2所示。
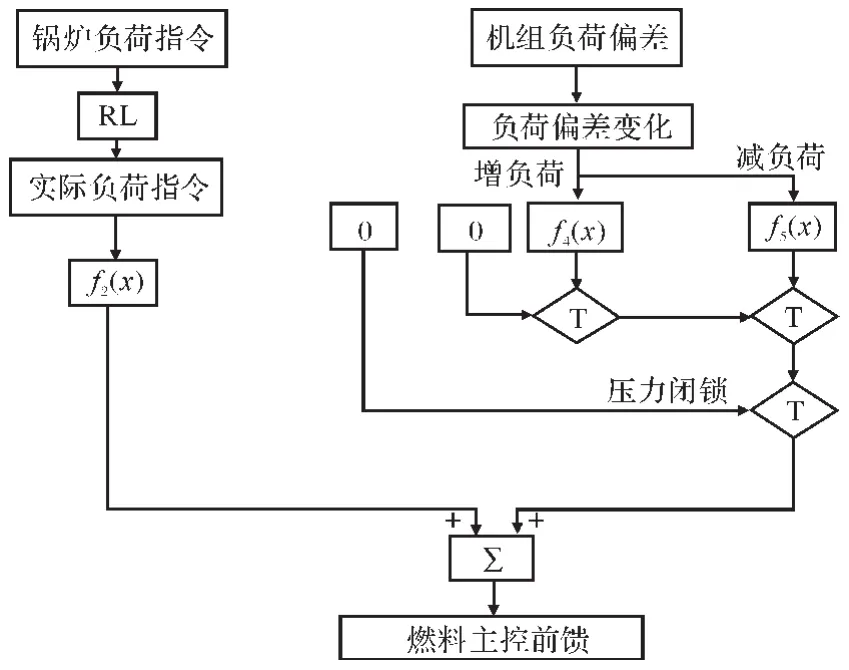
图2 优化后的燃料主控前馈
(1)机组在增负荷过程中,如果负荷指令与实际负荷偏差变大,通过f4(x)对燃料主控动态前馈进行调整,加大燃料量;反之,如果负荷偏差变小,则通过f4(x)减少燃料量。
(2)机组在减负荷过程中,如果负荷偏差变大,通过f5(x)对燃料主控动态前馈进行调整,加大燃料量;如果负荷偏差变小,则通过f5(x)减少燃料量。
(3)机组在没有负荷变化的稳态工况时,此回路失效,作用切为0。
(4)当存在压力闭锁情况时,此回路作用也失效,由原CCS控制回路自身进行闭锁和调节。
3.3 应用效果
经过以上的策略完善和参数整定,浙能乐清发电厂600 MW超临界机组从440 MW负荷增加至540 MW时的负荷初始响应较快,过程变化平稳,动态偏差小,汽温波动较小,实际负荷变化率接近12 MW/min,响应曲线如图3所示。燃料主控前馈和汽机主控前馈的幅值和时序匹配良好。图4为机组负荷指令按470 MW→490 MW→510 MW→540 MW变动的运行参数记录,从图中可以看出,在模拟AGC负荷指令小幅连续变化时,机组初始响应速度快,动态过程偏差小,运行参数稳定。

图3 优化后负荷指令大幅变动时的运行参数曲线
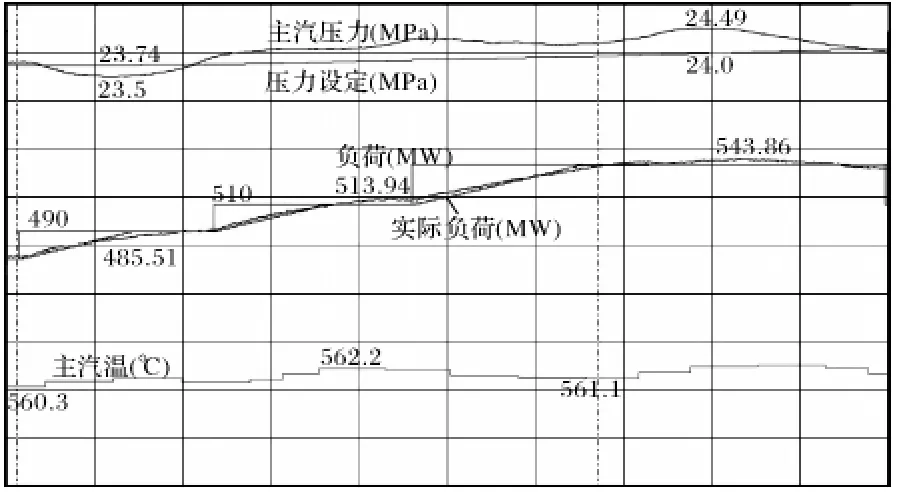
图4 优化后负荷指令小幅变动时的运行参数曲线
4 结语
超临界直流炉机组最大的特点是蓄热小,负荷变化初始响应慢,在AGC方式时如何满足电网自动控制要求和提高调节品质是大容量高参数机组必须考虑的问题。通过对汽机主控和燃料主控控制策略的完善,有效解决了机组升降负荷初期负荷响应慢以及机组大小负荷变化时动态偏差大的问题。从实际应用效果看,改善后的控制策略能满足良好的机组控制和品质要求。
[1] 朱北恒.火电厂热工自动化系统试验[M].中国电力出版社,2005.
[2] 尹峰,朱北恒,李泉.超(超)临界机组协调控制特性与控制策略[J].中国电力,2008,41(3)∶66-69.
[3] 尹峰,朱北恒,罗志浩,等.基于预给煤动态模型的直接指令平衡系统在火电厂协调控制中的应用[J].中国电力,2007,40(11)∶89-92.
[4] 王家兴,白焰,董玲,等.超临界600 MW机组直流炉协调控制系统及AGC策略的改进与应用[J].热力发电,2008,37(12)∶85-89.