南京长江四桥南锚碇深基坑支护结构水平位移监测
2010-05-22秦世伟
谷 川 秦世伟
(1.上海市政工程设计研究总院, 上海 200092;2.上海大学土木工程系, 上海 200072)
1 工程概况
南京长江四桥主桥南锚碇工程,位于长江南岸,距江南大堤约150 m,南锚碇基坑支护结构为嵌岩地连墙,平面呈“”字形,尺寸为82 m×59 m,墙厚1.5 m,墙顶面高程+5.000 m,墙底高程-35.000~-45.000 m,底部嵌入中风化砂岩层约3 m;地连墙施工分Ⅰ期和Ⅱ期两种槽段,槽段的连接采用铣接法。地连墙顶部设置高2 m、宽3 m帽梁。内衬按3 m高度分层逆作施工,9 m深度内衬厚1.0 m,9~24 m深度厚1.5 m,24~40 m深度厚2.0 m。南锚碇底板混凝土厚4 m,填芯混凝土后半部分为实心,前半部分设置16个空隔仓[1]。
该基坑三维剖切面如图1所示。
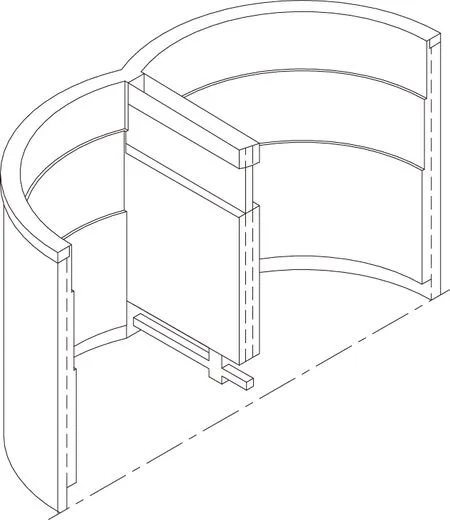
图1 南京长江四桥南锚碇三维剖切面
2 监测意义和内容
南京长江四桥南锚碇所处位置岩土条件复杂,开挖深度大,并且在国内首次采用“”形的地下连续墙作为锚碇基坑的围护结构,地墙的施工难度大,可供借鉴的经验不多,故必须在施工组织设计中制定监测方案,在实际施工中实施严密的监测控制,以确保围护结构工程在施工、运行中的安全,为优化设计、科学决策提供准确和可靠的依据[2]。
基坑开挖期间监测的目的主要有[3]:
(1)监测数据进行归纳整理,以期能及时发现施工过程中的不稳定因素,及时采取补救措施,确保基坑稳定安全,减少和避免损失。
(2)将现场监测结果用于优化设计,使设计达到优质安全、经济合理、施工快捷的目的。
(3)将现场监测的结果与理论预测值相比较,用反分析法推导出更为接近实际的理论计算模型,为“”形地下连续墙围护结构的进一步优化提供理论依据和实践参考。
本工程在建设过程中责任重大,不得有任何意外,布设的监测控制系统应能及时有效、准确地反映施工中围护体及周边环境的各种动向。根据专家评审意见确定的监控方案,制定的监控工作内容如下。
(1)地下连续墙监测:①地下连续墙深层侧向变形监测(测斜),②墙体钢筋应力监测,③墙体温度监测。
(2)支撑系统监测:①帽梁变形监测,②内衬应力监测。
(3)土工监测:坑外土压力监测。
(4)水工监测:坑外地下水位监测。
(5)环境监测:①坑外地基土沉降监测,②基坑附近油管沉降监测,③长江大堤沉降监测。
监测项目组2009年3月成立并正式进驻现场,紧密配合南锚碇施工进程,开展测点埋设、监测及数据处理工作,到2009年12月底板浇筑完成为止,历时9个月。
3 水平位移监测内容和方法
变形监测控制的目的就是通过监测控制周边设施及基坑结构本身的姿态和变形,与理论计算或规范要求偏差较大时,必须立即进行误差分析并协助施工单位确定调整方法,为下一阶段的施工做好准备工作。
水平位移测量的方法经过多年的发展,已经有很多种方法可供选择。规范[4]上推荐的方法有:测定特定方向上的水平位移时可采用视准线法、小角度法[4]投点法等;测定监测点任意方向的水平位移时可视监测点的分布情况,采用前方交会法[5]、自由设站法[6]、极坐标法等;当基准点距基坑较远时,可采用GPS测量法[7]或三角、三边、边角测量与基准线法相结合的综合测量方法。
针对南京长江四桥南锚碇基坑监测的具体工程,分析认为:视准线法、小角度法、投点法等测定特定方向上水平位移的方法不适合本文的“”字形基坑;前方交会法工作量太大,并且该方法以及自由设站法、三角法、三边法对基准点的数量以及图形条件均有一定的要求;GPS测量法的动态模式相对而言精度较低,静态模式需要时间较长,不适合对时效性要求较高的该类变形监测,如每个点都安装GPS接收机又会导致难以承受的经济成本。
还必须要考虑的实际问题就是现场基准点的选择。该锚碇向北约150 m为长江大堤;向东为国家粮库,属于重点保护单位,未经许可不得入内;向南为建筑材料堆场以及混凝土搅拌区域;向西为建筑用钢堆放区域。另外,该区域原为农田以及荒地,靠近长江,地质条件也比较差。如果在地面上造标,一方面视线不好,随时可能会被遮挡;另一方面,由于需要长期使用,需对地基进行处理,从而加大了经济成本。
参考了施工方在基坑开挖前3年建立的施工控制网,以及3年的点位稳定性观测成果,采用了基坑西北侧距离基坑中心224 m处某厂房(多层建筑)顶上的施工平面控制点NF08作为起算点,以位于基坑东北方向距离NF08点660 m的NF10点作为定向点,在基坑开挖深度3倍范围以外不受施工影响的稳定区域又设置了两个水平位移控制点作为检核和备用控制点。同时,为了检查NF08的点位稳定情况,还设置了3个方向边作为检核条件,NF08的点位变化能通过这几个方向边的方位角变化反映出来。
NF08、NF10两个基准点以及基坑的位置关系如图2所示。
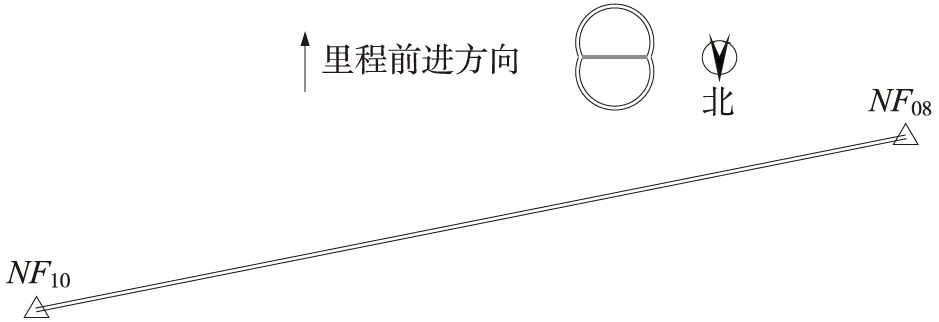
图2 基准点与基坑的位置关系
基坑水平位移监测点的布置如图3所示。水平位移监测点同时也作为垂直位移监测点。
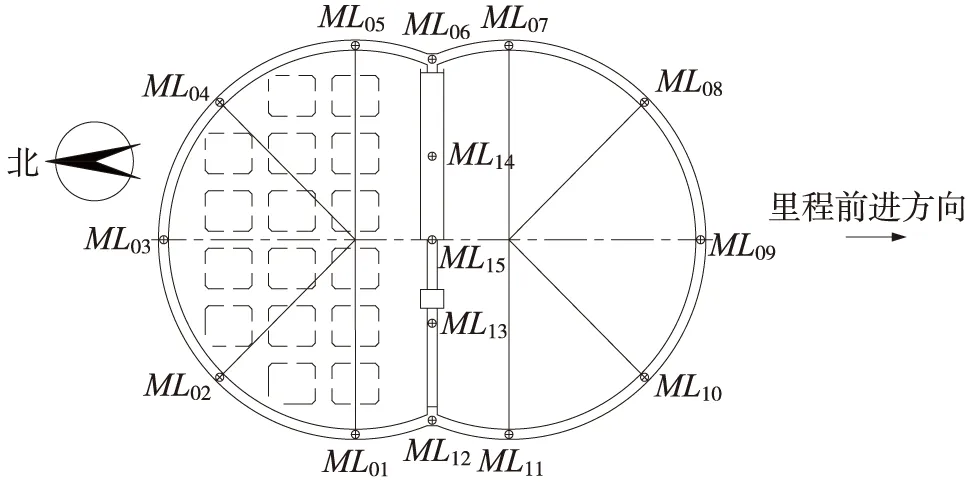
图3 水平位移监测点布置
首先,在NF08设站,测量NF10-NF08-ML14的角度以及NF08-ML14之间的距离。角度测量采用两测回;距离采用往返各两次,即NF08照准ML14测距2次,ML14照准NF08测距2次,4次测距取平均。在此需要说明的是,原定方案中选择的是ML15,但由于ML15被塔吊遮挡,实际操作时选择了ML14。
根据角度、距离观测值,以及NF08、NF10两点的平面坐标,计算得到ML14的坐标。该方法类似于精密导线测量方法。
在ML14设站,以NF08为定向点,用极坐标法测量得到其他14个点的平面坐标。测量过程中,为消除或者削弱一部分误差,采用盘左盘右观测的方式。
4 精度评估
采用的仪器为SOKKIA NET05自动全站仪,标称精度为:测角±0.5″,测距±(0.8+1×10-6D)mm[8]。
首先计算ML14的点位精度,根据误差传播律[9]
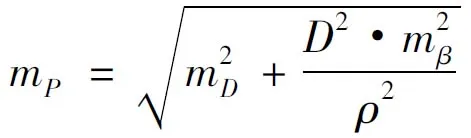
(1)
D=224 m,mβ=0.5″,计算得到:mP=1.15 mm。
由于定向边距离较远(224 m),相对于基坑的尺寸(最大半径处41 m)而言很大,故此计算其他监测点的点位精度时可不考虑ML14的点位误差对方位角的影响。
其他监测点的点位精度可用公式(2)进行计算
(2)

经过精度估计以及误差评定,认为水平位移监测点最弱点点位中误差优于1.5 mm。
根据规范[5]要求,基坑围护墙(坡)顶水平位移监测精度要求根据设计控制值确定,最高做到监测点坐标中误差≤1.5 mm(设计控制值≤30 mm),本文的方法能够满足最高要求。本工程中设计控制值为日变量±3 mm,累计变化值25 mm,显然,本文的方法能够满足规范和设计要求。
在实际测量的过程中,由于该监测项目的距离比较近,监测点点位误差大部分是由测距部分的固定误差部分引起。由于每次均采用同一套仪器设备,在测量中该部分误差有些被抵消掉,实际取得的精度略高于估计精度。
5 监测结果
2009年8月基坑开挖之前进行了首次水平位移监测数据采集,12月底板浇筑完成后进行了最后一次水平位移监测。由于整个工程施工开挖期间测量的次数太多,数据量太大,我们以最后一期监测数据的结果为例进行了分析。底板浇筑后各监测点的累计水平位移量如表1所示。
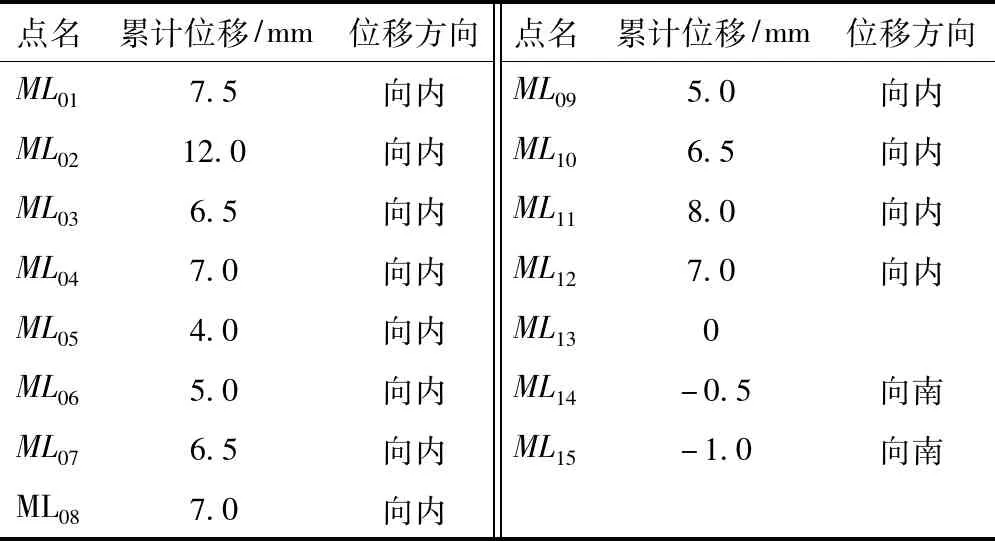
表1 底板浇筑后各监测点的累计水平位移
从表1可以看出,在基坑开挖过程中,由于开挖的影响,帽梁产生向基坑内的变形。由于该锚碇为对称结构,而且尺寸比较大,难以产生较大的整体位移,体现在监测点ML13~ML15三个监测点上,这三个点的位移量都非常小,可以说基本上未产生水平位移。
为了更加全面的了解该类型基坑开挖过程中的变形规律,将最后一期的垂直位移监测数据列出,如表2所示。
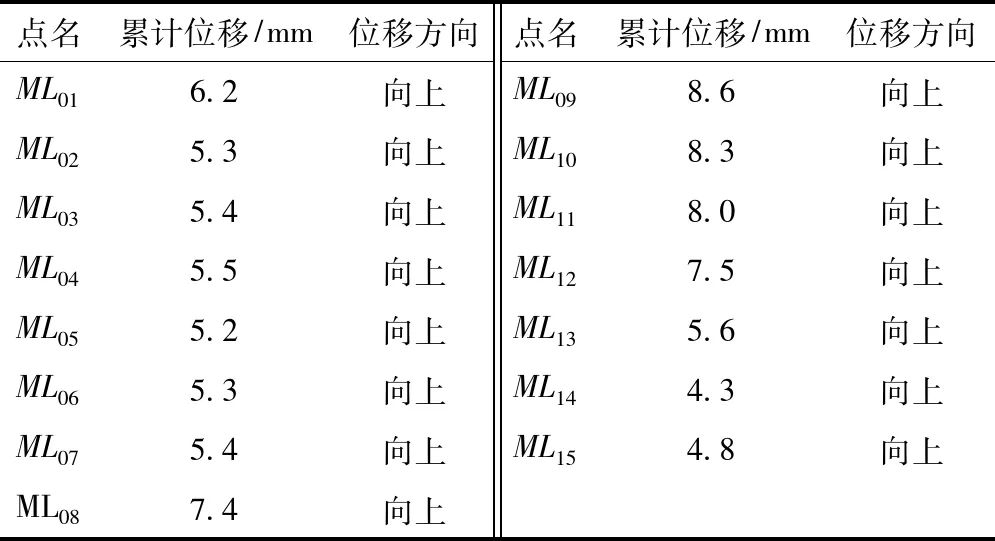
表2 底板浇筑后各监测点的累计垂直位移
可以清楚地看到,在基坑开挖过程中,由于开挖过程中降水以及开挖的影响,整个基坑所有监测点都产生了向上的垂直位移。
6 结束语
在基坑水平位移监测过程中,确定监测精度要求非常重要。此外,并不一定是精度要求随着基坑规模、开挖深度的增大而增加。一方面要考虑到基坑本身的安全,另一方面要考虑到周围环境的安全。
对监测方法应综合比较,不能只看精度一个指标,可行性以及经济性等也是必须考虑的,在满足精度要求的基础上,简便、可行、经济的方法为好。
在基坑监测过程中,应充分利用现有的点位数据观测资料,包括坐标数据以及点位稳定性情况等资料。
在同一测站需要测量的点数较多、时间较长的情况下,有必要设立一条方位角检查边,每测量几个点进行一下方位角的检核。测量过程中发现,全站仪有时会发生一定的角度漂移,该数值有时甚至可达10″。分析认为有可能是由脚架转动、仪器轴系隙动等引起,但原因尚不明确。但是该项误差影响非常大,设置一条方位角检查边可消除或削弱该误差的影响。在编制一些自动监测软件的过程中,我们也采取措施进行了该项误差的克服。
ML14点既是监测点也作为一个设站点,由于施工的限制我们无法设置强制对中点,为了削弱对中误差,采用了替换基座的方式。
[1]上海市政工程设计研究总院.南京长江四桥南锚碇工程施工监测控制方案[R].上海:上海市政工程设计研究总院,2008
[2]上海市政工程设计研究总院.南京长江第四大桥施工监控总结报告[R].上海:上海市政工程设计研究总院,2010
[3]夏才初,潘国荣.土木工程监测技术[M].北京:中国建筑工业出版社,2001
[4]谷川,李明峰,潘国荣.某码头施工水平位移监测方法与精度探讨[J].测绘信息与工程,2006,31(04):16-18
[5]周西振.前方交会法测定变形监测点最佳交会图形的探讨[J].勘察科学技术,2002(3):53-55
[6]林泽耿,自由设站法监测基坑水平位移[J].广州建筑,2003(2):699-699
[7]光辉.基于GPS的基坑监测数据处理及可视化实现[D].南京:南京林业大学,2009
[8]武大测绘学院.误差理论与测量平差基础[M].武汉:武汉大学出版社,2005
[9]GB50497—2009 建筑基坑工程监测技术规范[S]
