基于SPWM逆变器控制系统的建模与仿真
2010-05-10张振国侯建勤
张振国,侯建勤
(上海理工大学 光电信息与计算机工程学院,上海200093)
0 引 言
目前,电压外环电流内环的双环控制方案是高性能逆变的发展方向之一。双环控制方案的电流内环扩大逆变器控制系统的带宽,使得逆变器动态响应加快,非线性负载适应能力加强,输出电压的谐波含量减小。由于考虑到滤波电感等效电阻的压降作用和电压外环对电流内环的缓慢扰动作用,为要实现更好的控制效果,必须对控制对象实现状态反馈解耦,消除输出电压产生的交叉反馈作用。本文在状态反馈解耦的基础上,建立了SPWM的仿真模型,并在此基础上进行了仿真。仿真过程考虑了死区效应和器件的损耗,因此是较为精确的模型。
1 单相电压型逆变器的数学模型
为方便控制器的设计,首先建立单相SPWM(sinusoidal pulse width modulation)逆变器合理的数学模型。
图1 中E 为直流母线电压,ui为逆变器输出电压,uc为电容两端电压,iL为流过输出滤波电感L 的电流,io代表负载电流。滤波电感L 与滤波电容C 构成低通滤波器。r 为包括线路电阻、死区效应、开关管导通压降、线路电阻等逆变器中各种阻尼因素的综合等效电阻。电压ui可以取三个值:E,0或-E,因此,电压ui是幅值为+E 或-E 的电压脉冲序列。
由于逆变器电路中各个功率开关器件都工作在开关状态,因此是一个线性和非线性相结合的状态,分析时有一定的难度。可假设直流母线电压源E 的幅值恒定,功率开关为理想器件,并且逆变器输出的基波频率、LC 滤波器的谐振频率与开关频率相比足够的低,其截止频率通常选择在开关频率的1/10 ~1/5 左右,则逆变器可以简化为一个恒定增益的放大器,从而可以采用状态空间平均法得到逆变器的线性化模型,单相电压型SPWM逆变器的等效电路如图1 所示。
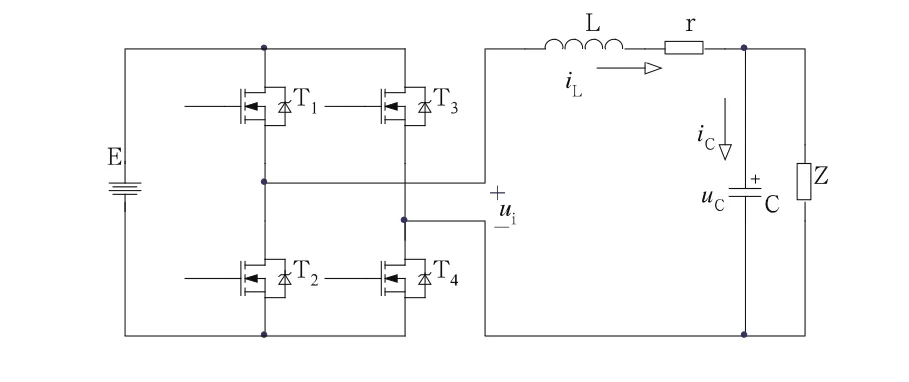
图1 单相电压型SPWM逆变器等效电路
基于基尔霍夫电压定律和电流定律,可以得到逆变器的小型号模型为:

选择电容电压Uc和电感电流iL作为状态变量,逆变器的连续时间状态方程为:

据此可以容易地推出其频域传递函数:

从而可以得出逆变器在频域下的等效框图如图2所示。

图2 单相电压型SPWM逆变器的等效框图
2 电流内环电压外环双环控制的基本原理
早些年,逆变器电压电流双环控制用输出电压有效值外环维持输出电压有效值恒定,这种控制方式只能保证输出电压的有效值恒定,不能保证输出电压的波形质量,特别是在非线性负载条件下输出电压谐波含量大,波形失真严重;另一方面,电压有效值外环控制的动态响应过程十分缓慢,在突加、突减负载时输出波形波动大,恢复时间一般需要几个甚至几十个基波周期,瞬时控制方案可以在运行过程中实时地调控输出电压波形,使得供电质量大大提高。其中,应用较多的有:电压单环控制、电压电流双环控制、滞环控制等。本文主要采用电流内环电压外环的双环控制,结构框图如图3 所示,输出反馈电压和给定电压基准信号比较,形成瞬时误差调节信号。经过电压PI 调节器后作为电流给定基准值,与电流反馈信号比较,形成瞬时误差信号,经过电流PI 调节器产生电流误差控制信号。该信号与三角载波交截后产生SPWM 开关信号,控制主电路开关器件,在LC 滤波器前端形成SPWM调制电压,经LC 滤波器后输出正弦电压。

图3 双闭环控制系统框图
2.1 具有状态解耦的多环控制系统
在双环控制系统中,由于电压外环对电流内环具有缓慢扰动作用,要实现更好的控制效果,必须对控制对象进行解耦,消除输出电压产生的交叉反馈作用。依据控制结构的不同,效果也会不一样,文中对以下提出两种改进方案进行分析。
(1)带负载电流解耦的电感电流反馈
如果电感电流能够得到快速跟踪,则相对外环来说,内环动态过程可以忽略,负载电流就很容易解耦。图4 是实现了负载电流解耦的内环电感电流反馈控制结构图。负载电流解耦把负载电流作为电流环附加指令,不必等到电压误差产生就能提供负载所需要的电流。这样负载突变可以通过前馈有效地抑制,不依赖外环来调节,从而提高响应速度。电感电流内环的带宽由Ki设置,带宽越大,电感电流跟踪的快速性越好,负载电流解耦的效果也越好,输出波形的稳态精度也越高。
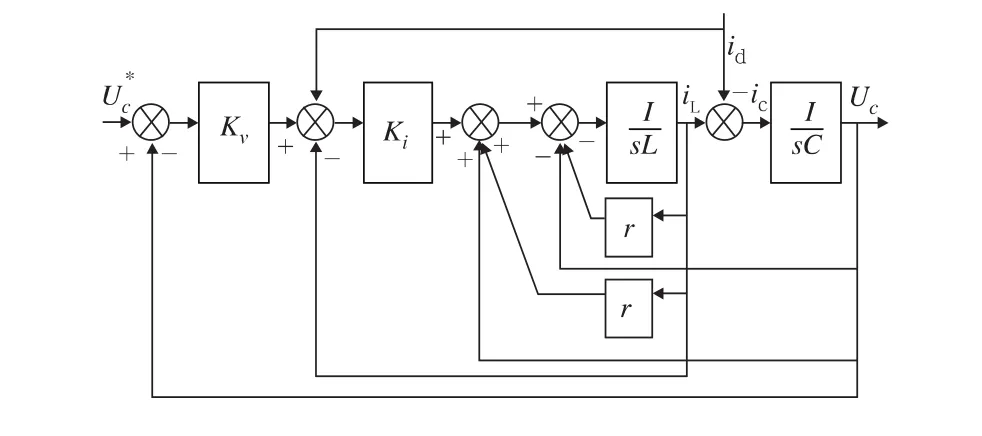
图4 电感电流反馈控制框图
指令传递函数:

扰动传递函数:

(2)带输出电压解耦的电容电流反馈
从电路的角度来看,对LC 滤波器而言,出现负载扰动时,电感电流不能突变,只能影响电容电流。因此,电容电流反馈可以直接反映出负载电流的变化。从扰动的作用点来看,采用电容电流反馈可以将负载扰动,包含在反馈环路的前向通道内,因此可以及时对扰动产生抑制。从反馈原理来看,反馈哪个量,就能增强那个量的稳定度,反馈电容电流能使其在负载汲取电流时仍有维持不变的趋势。这样,不需要扰动前馈补偿,电容电流反馈结构就可以得到比仅用电感电流反馈要好的动态性能。从逆变器的输出来看,只要精确保证电容电流为正弦,无论负载如何变化都可以得到良好的输出正弦电压。若取电感电流反馈(无负载电流前馈补偿),那么负载扰动只能通过电压外环调节;而取电容电流反馈,负载扰动在内环就可以得到及时的抑制。由于没有检测电感电流iL,电感等效电阻无法解耦,其动态输出特性在低频段会受到一定影响。

图5 电容电流反馈控制框图
指令传递函数:

扰动传递函数:

2.2 两种控制策略的比较
逆变器的输出是对指令响应和扰动响应的和,可以从指令传递函数和扰动传递函数两方面入手,分析比较两种方案的性能。首先通过对指令传递函数和扰动传递函数的bode 图仿真来比较两种方案的动态跟踪性能和扰动抑制能力,从而选择较好的控制方案。
在bode 图仿真时,系统参数取基波频率60 Hz ,滤波电感L=1.1 mH,滤波电容C=20 μF,滤波电感等效电阻r =0.6 Ω,开关频率20 kHz ,选取 KV1=0.2 ,Ki1=22 ,KV2=0.2 ,Ki2=32 。

图6 指令传函的对数幅频响应曲线
通过图6 可以比较系统对指令的跟踪效果,可以看到两种方案低频段增益均为1 ,能够完全复现指令,开环逆变器的谐振峰均被消除,具有良好的指令动态跟踪性能。
既然逆变器输出是对指令响应和扰动响应的综合,那么只分析逆变器对指令的跟踪效果是不够的,还要考虑对扰动的抑制能力,扰动传函的对数幅频响应曲线就能表征这个能力。
通过图7 可以看到,由于扰动主要位于低频段,所以通过这一段的波特图判断扰动抑制性能,低频增益越小,表明系统对扰动的衰减越厉害,即对扰动的抑制效果越好。如图所示,方案一对7 次以下的谐波均有衰减作用,方案二对5 次以下的谐波均有衰减作用,在60 Hz 处,方案一对基波扰动的抑制要好于方案二,这是因为方案二没有实现电感等效电阻解耦,基波在这个电阻上有压降,影响了输出波形。

图7 扰动传函的对数幅频响应曲线
通过以上对指令和扰动传递函数的分析可知,两种方案对指令的跟踪能力是很接近的,因此选择方案的主要依据是它们对扰动的抑制能力。方案一通过前馈而方案二通过反馈对扰动进行补偿,考虑到反馈电感电流能够实现电感等效电阻解耦,故方案一在低频段的扰动抑制能力强于方案二,因此,选择方案一作为系统的控制结构。
3 系统仿真
3.1 系统仿真模型
本文在MATLAB 环境下的Simulink 中建模和仿真。该仿真模型主要分为两个部分:主电路和控制器。主电路如图8 所示,控制器主要由电压电流反馈环节、负载电流补偿环节、SPWM发生环节和死区延迟环节组成。从主电路仿真模型可以看到:在检验突加、突减非线性负载时,用两个脉冲波、乘法器和理想开关组成矩形脉冲信号,周期为0.4 s ,在0.2 s 时突加额定负载,在0.4 s 时,突减额定负载。系统仿真参数取基波频率为60 Hz ,直流母线电压E=400 V,滤波电感L=1.1 mH,滤波电容C=20 μF,滤波电感等效电阻r=0.6 Ω,开关频率为20 kHz ,输出电压幅值为220 V,输出额定功率因数cosΦ=0.8 。

图8 主电路仿真模型
3.2 仿真结果分析
在以下三种不同运行条件下进行仿真实验:
(1)在0~0.2 s 期间,逆变器空载运行;0.2 s 时突加负载运行。
(2)在0.2 s ~0.4 s 期间,逆变器在额定负载下运行。
(3)在0.4 s 时,逆变器突减负载运行。
三种条件下,输出电压、负载电流的波形图和输出电压 THD 的波形如图9 ,图10 ,图11。
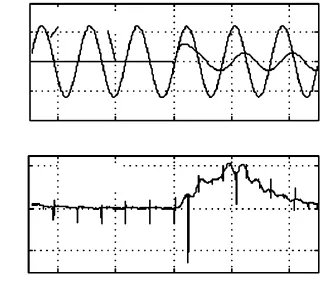
图9 突加非线性负载运行

图10 额定负载运行
仿真结果表明,基于状态反馈解耦的双环控制系统在不同的负载条件下,不但能获得高质量的输出电压波形,并且动态响应速度快:
(1)系统动态响应快,在三种条件下运行,都可以在两个周期内(<0.4 s )进入稳态。
(2)输出电压质量高,谐波含量少,在突加突减负载时,总 THD 值不超过0.4 %,进入稳态后,THD 值不超过0.3 %。
(3)抗干扰能力强,对突加突减非线性负载所引起的波形失真具有很强的抑制能力,在两个周期内(<0.4 s ),就可校正波形失真。

图11 突减非线性负载运行
4 结 论
本文建立的电压电流双环控制系统,采用负载电流解耦的内环电感电流反馈、状态反馈解耦控制结构,对单相SPWM逆变器进行建模与仿真。仿真结果表明,所采用的控制方案使逆变器具有输出电压质量高(总THD≤0.4 %),动态响应速度快(不超过0.4 s ),抗干扰能力强等优点,能够较好地达到高性能指标的要求,具有很高的工业使用价值。
[1]王红艳,王晓辉,曹丽璐.单相400 Hz 逆变器双环控制技术研究[J ].电力系统保护与控制,2009 ,37(7):54-57.
[2]马学军.单相电压型PWM逆变器数学模型和数字仿真[J ].黄石高等专科学校学报,2004 ,20(2):1-4.
[3]杨会敏,宋建成.基于双环控制的单相电压型PWM逆变器建模与仿真[J ].电气传动自动化,2009 ,31(1):15-18.
[4]Pablo Sanchis ,Alfredo Ursa ,Eugenio Gubia ,Luis Marroyo.Boost DC-AC inverter :a new control strategy[J ].IEEE Transactions on Power Electronics ,2005 ,20 (2 ):343-353.
[5]曲学基,曲敬铠,于明扬.逆变技术基础与应用[M].北京:电子工业出版社,2007.
[6]李俊林.单相逆变器重复控制和双环控制技术研究(硕士学位论文)[D].武汉:华中科技大学,2004 :37-59.
