一种气动竞赛机器人的研制
2010-05-10吴翠琴邝先验
吴翠琴,邝先验
(江西理工大学 机电工程学院,赣州 341000)
0 引言
机器人竞赛是人类高智能技术之间的对抗赛,融机械、机器人学、机电一体化、嵌入式控制、实时数字信号处理、图像处理与图像识别、知识工程与专家系统、决策、轨迹规划、多智能体的协调以及无线通讯等理论和技术于一体,是以各类体育竞赛为载体的高科技对抗。为给当代大学生提供一个探索科技、培养创新思维的实践舞台,从2002年开始,中央电视台每年举办一次“全国大学生机器人电视大赛”。本文以参加第八届CCTV 亚太机器人大赛国内选拔活动“为了胜利的锣鼓声让我们一起上路”的旅客机器人为例,介绍一种气动竞赛机器人的设计。比赛纲要:全自动的机器人轿夫在前面,后面是手动的机器人轿夫。他们合作把坐在轿子里面的自动的旅客机器人抬起来,这个过程中设置了各种各样的任务,包括爬山和过树林。轿子和旅客机器人一定不可以掉下来。当旅客机器人到达目标区域的时候,它必须要敲三声鼓。三个传统的日本鼓垂直安放在平台上。第一个敲响三个鼓的参赛团队为胜利者。作为本年度的参赛队之一,本文主要介绍旅客机器人的结构及控制系统设计。
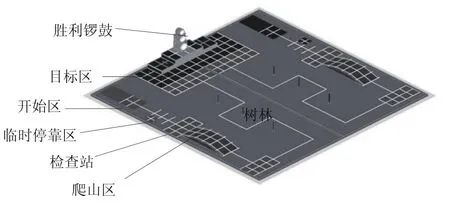
图1 比赛场地
1 机器人结构设计
为了实现快速击鼓,我们设计自动旅客机器人应轻巧灵活,还要求机器人稳定性好,该机器人采用履带式轮,可以大大提高机器人在轿子上以及击鼓期间的稳定性。在结构上主要包括移动机构、手臂机构和手腕机构。整体展开高度2.0m,折叠高度70cm,主体部分高15cm,压低重心,提高击鼓时期的机身稳定性。立柱材料方面最下面为钢制,降低重心,上面两节及鼓槌为铝合金材质,减轻重量,手臂机构采用气缸驱动,以压缩空气瓶为气源,升降速度与系统稳定性均可得到保证。旅客机器人的结构示意图如图2所示。初步选定所用气缸缸径,根据行程范围确定气缸行程。然后选择与气缸相关的连接件和导向装置,装配成独立功能模块。各模块都依次设计好后进行部装,完成结构设计。机器人主要由立柱、手腕、手臂、手爪(鼓槌)组成,立柱为一个双作用气缸,可以进行升降运动;手臂为一个伸缩缸,可以实现伸出和缩回动作;手腕为一个双作用摆动气缸,可以进行上下摆动。在击鼓时要求的动作顺序为:
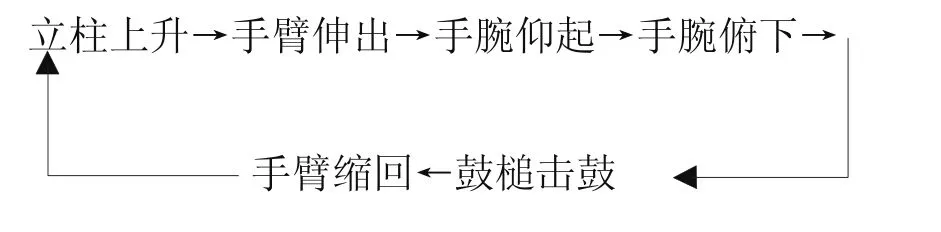

图2 结构示意图
2 机器人控制系统设计
2.1 气动回路设计
按照已经确定的整体设计方案,旅客机器人的主要任务就是击鼓,而这一机构的动力元件我们选择使用气缸,并用电磁阀加以控制。其特性是在同等功率下,相对于电器装置,气压装置而言体积小,重量轻,功率密度大,结构紧凑,控制比较方便,容易与电子控制系统相结合,适合自动化程度高的场合。这些特性十分符合对比赛机器人的要求。气动机器人的气动原理如图所示。每个气缸装有2个单向节流阀用以进行速度控制,装有2个磁性接近开关用以进行位置检测,并由一个两位五通电磁换向阀进行动作控制。
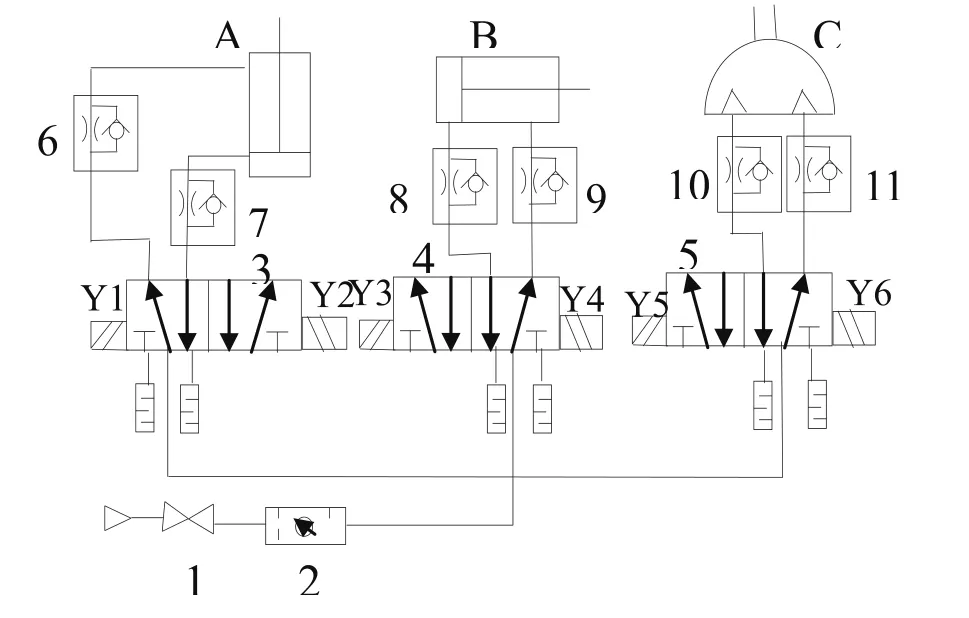
图3 气动控制回路图
2.2 利用PLC进行多气缸动作控制
应用PLC控制机器人实现各种规定的预定动作,可以简化控制线路,节省成本,提高劳动生产率,该设计中全部采用双电控电磁阀作为驱动气缸的主控阀,具有存储数量大、执行速度快等特点,机器人控制系统选用的是S7-200系列中的CPU24的型号。该型号PLC集成的数字量输入/输出为14入10出,基本位布尔运算执行时间为0.22us,用户存储器容量8K字节。而且它还具备6路30kHz七单相高速计数器和2路20kHz高速脉冲输出。I/O接口与图所示,SQ1-SQ6为行程开关,Y1-Y6为电磁阀。
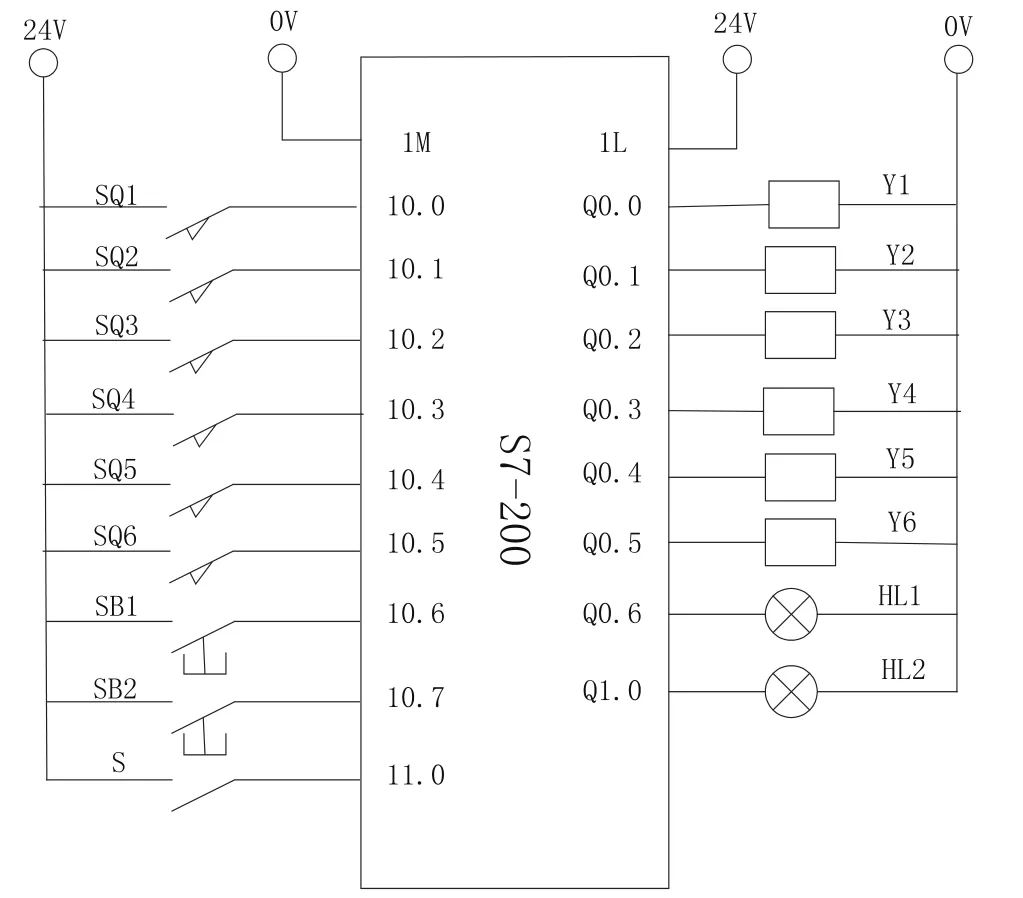
图4 PLC I/O接线
3 结束语
本文介绍的气动机器人设计方案参加了中央电视台举办的第八届CCTV全国大学生机器人电视大赛,比赛的结果表明,本次设计的机器人结构简单,行进速度快,运行平稳,达到设计要求,取得了较好的成绩,为气动控制系统用于竞赛机器人提供了经验和依据。
[1] 许弋.竞赛机器人的控制系统设计[J].无锡职业技术学院学报,2005,4(1).
[2] 鲍燕伟,吴玉兰.一种通用气动机械手的控制设计.液压与气动,2005(10).
[3] 陈永琴.小型机器人结构设计[J].液压与气动,2005(01).
[4] B.Vemuri,Y.Chen.Joint image registration and segmentation,Geometric Level Set Methods in Imaging,Vision,and Graphics[C].Springer,2003.
[5] 钱晓忠.竞赛机器人的创意设计与基本机械结构[J].无锡职业技术学院学报,2005,4.
[6] 王晓方.液压与气动技术[M].北京:中国轻工业出版社,2006.
