基于iSIGHT的铁道车辆横向稳定性优化设计
2010-05-04曹炜洲黄尊地
钟 睦,曹炜洲,黄尊地
(中南大学 交通运输工程学院,湖南长沙410075)
机车车辆在直线轨道上运行时,会产生具有自激振动特性的蛇行运动,通常称为横向稳定性。当机车车辆失稳时,自激振动会变得十分激烈,导致车辆运行品质的恶化、部件磨损和疲劳的加快,也限制了列车速度的提高,甚至危及行车安全。因此提高横向稳定性是机车车辆设计的一个重要方面。
1 理论基础
铁道机车车辆系统的运动微分方程组可表示为[1]:
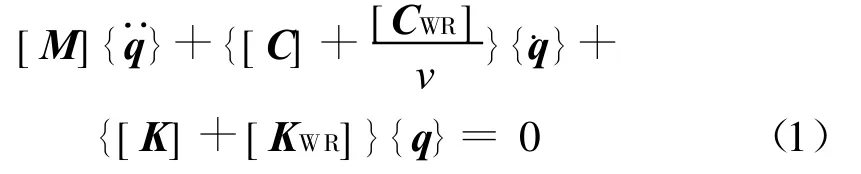
式中[M]为惯性矩阵;[C]为黏性阻尼矩阵;[CWR]为蠕滑阻尼矩阵;[K]为刚度矩阵;[]为蠕滑刚度和接触刚度矩阵;[q]为位移向量(列矩阵);v为车辆运行速度。
系统的稳定性可根据式(1)的特征值来判别。如果特征值的实部出现正数,则系统失稳。系统特征值与车辆运行速度有关,系统开始失稳时对应的速度称为临界失稳速度。临界失稳速度反应了横向稳定性的优劣。临界失稳速度越高,横向稳定性越好。
在机车车辆设计中,可以通过合理选择悬挂参数,来获得较高的临界失稳速度。优化设计作为现代设计的一个重要手段,在对复杂的铁道车辆多刚体动力学系统进行优化时,是合理选择悬挂参数的有效途径。但是由于车辆动力学模型和优化算法的复杂性,其难度和工作量很大,而且难于综合考虑多个参数和获得全局最优解。
利用多学科优化软件iSIGHT,实现与多体系统动力学分析软件SIMPACK的数据传递和过程集成。采用iSIGH T提供的多岛遗传算法和序列二次规划算法,对铁道车辆的悬挂参数进行优化设计,提高其临界失稳速度。通过把大量需要人工完成的工作交由软件实现自动化处理,大大提高设计效率。
2 优化设计方案
针对 Manchester Benchmarks中的客车 Vehicle 1[2]进行横向稳定性优化,以车辆悬挂参数为设计变量,以临界失稳速度为目标函数。车辆的其他参数参见文献[2]。
优化问题的数学模型为:

式中vcr为临界失稳速度;X为设计变量;XL为设计变量的下限;XU为设计变量的上限。
铁道车辆运行中,影响其横向稳定性的一般为横向和纵向悬挂参数[3]。因此,设计变量共选取7个悬挂参数,分别是一系横向刚度、纵向刚度、横向阻尼、纵向阻尼,二系横向剪切刚度、纵向剪切刚度、横向阻尼。考虑到悬挂元件的实际情况,对悬挂参数的上、下限进行约束,如表1所示。

表1 设计变量表
3 优化设计流程
车辆临界失稳速度的求解由多体系统动力学分析软件SIMPACK完成,优化过程的实现由优化软件iSIGHT完成。优化算法采用iSIGHT提供的多岛遗传算法和序列二次规划算法。iSIGHT读入SIMPACK动力学模型的变量,并驱动SIMPACK计算车辆临界失稳速度,完成两者之间的数据集成和过程集成。具体过程如图1所示。
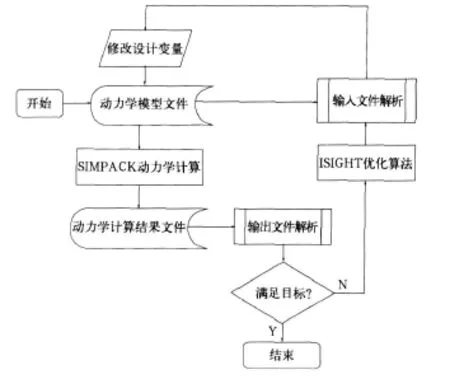
图1 优化设计流程图
3.1 车辆动力学模型的建立
车辆动力学模型的建立在SIMPACK软件中完成。SIMPACK软件是多体系统动力学分析软件,包含多个专业模块。其中Wheel/Rail模块是世界领先的轨道车辆动力学仿真工具。
在SIMPACK Wheel/Rail中定义轮轨接触关系,建立包括轮对、转向架、车体、弹簧、阻尼器等在内的完整的车辆模型,定义线路,对车辆的动力学行为进行分析计算。
为便于SIMPACK动力学模型和iSIGH T软件之间数据的传输,实现优化过程的自动化,在使用SIMPACK构建铁道车辆动力学模型的过程中,采用了参数化建模方法,定义对应于表1列出的悬挂参数。
建立好的车辆动力学模型如图2所示。

图2 车辆多体动力学模型
3.2 优化过程集成
优化工作在iSIGHT软件中完成。iSIGHT是过程集成、优化设计和稳健性设计的软件。iSIGHT提供了完备的优化工具集,用户可交互式选用,并可针对特定问题进行定制。更重要的是iSIGH T提供一种多学科优化操作,可以与其他分析软件集成,解决复杂的优化设计问题。
针对车辆动力学优化问题,为实现优化过程的自动进行,需要将动力学模型的参数化修改、动力学计算和优化、评判等过程进行集成。
在iSIGH T中,过程集成由输入、仿真运算、输出3部分组成。如图3所示,vehicle.sys是SIMPACK建立的动力学模型文件,属于输入部分。simpack8607.bat是执行SIMPACK动力学分析的批处理文件,起仿真运算作用。out.txt文件是SIMPACK仿真计算得到的结果文件,属于输出部分。

图3 过程集成
优化设计是一个反复迭代的过程,其步骤为:
(1)利用iSIGHT的文件解析功能,对SIMPACK动力学模型文件进行分析,提取车辆动力学模型构建过程中定义的参数变量,并将其转化为iSIGH T中的变量参数,使之可以动态调整。完成一次迭代后,根据选定的优化算法,修改变量参数的值。通过iSIGHT自动更新SIMPACK动力学模型。
(2)由iSIGHT调用批处理文件simpack8607.bat,实现SIMPACK的自动运行,并通过SIMPACK的命令语句,完成车辆临界失稳速度的计算,输出计算结果文件。
(3)利用iSIGHT的文件解析功能,从仿真运算结果文件中获取目标函数值。
(4)对目标函数进行评判,判断是否继续迭代计算。
3.3 优化策略的确定
完成仿真流程的定义后,即可确定优化策略。本文采用多岛遗传算法和序列二次规划算法相结合的方法。首先采用多岛遗传算法进行全局寻优,然后以其优化结果作为初始点,采用序列二次规划算法进行局部寻优。
遗传算法能够同时搜索解空间的许多点,避免了其他算法容易在局部最优解附近徘徊的缺点,达到充分而快速的全局收敛,因此被成功地应用于多参数及全局优化问题。遗传算法是通过模拟自然进化过程搜索最优解的方法。
多岛遗传算法是一种改进的遗传算法,它将每个种群都分为若干个子种群(也称为岛)[2]。分别在各子种群中进行传统的遗传算法,一些个体被选出来周期地“迁移”到其他岛上。有两个参数控制着迁移过程:迁移间隔(每次迁移之后繁殖后代的个数)、迁移率(迁移个体所占的百分比)。这种迁移操作通常使多岛遗传算法比其他遗传算法更加高效[4]。
序列二次规划是处理中、小规模非线性规划问题最优秀的算法之一[5],其基本思想是通过求解一系列二次规划(QP)子问题来求解原最优化问题。这些二次规划子问题的目标函数是原约束最优化问题的Lagrange函数的某种二次近似,其约束条件是原约束条件的线性逼近。在某个近似解处,将原非线性规划问题简化为处理一个二次规划问题,求取最优解,如果有,则认为是原非线性规划问题的最优解,否则,用近似解代替构成一个新的二次规划问题,继续迭代。
4 优化结果
完成动力学建模与优化过程集成后,即可根据制定的优化策略,按优化方案进行迭代计算。得到优化后的临界失稳速度为99.6 m/s,与初始值78.5 m/s相比,提高了26.8%,效果明显。相应的悬挂参数的优化结果见表2。
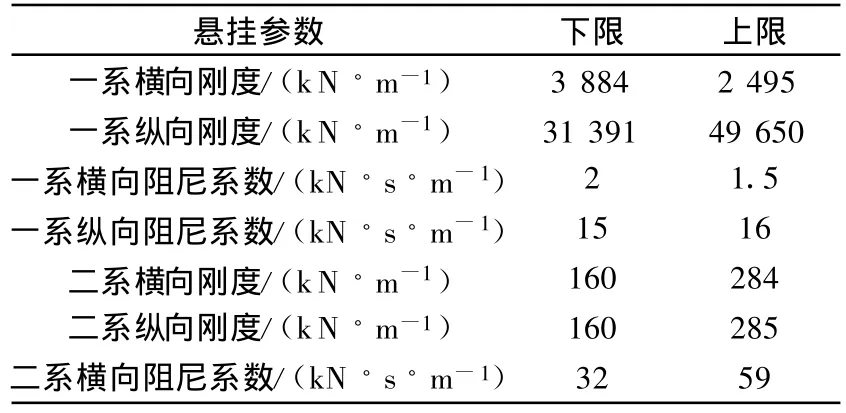
表1 设计变量表
5 结论
(1)通过建立基于iSIGHT的多学科综合优化集成框架,实现了铁道车辆横向稳定性的优化设计。在统一的数据环境中,通过软件的自动化处理,大大提高了设计效率。
(2)通过对铁道车辆7个悬挂参数进行优化,结果表明,采用多岛遗传算法和序列二次规划相结合的优化策略,对提高铁道车辆临界失稳速度,具有实用价值。
(3)所采用的方法可进一步扩展,将车辆运行稳定性、安全性、舒适度综合考虑,实现车辆动力学性能的多目标优化。
[1] 张定贤.机车车辆轨道系统动力学[M].北京:中国铁道出版社,1996.
[2] Manchester Metropolitan University.The Manchester Benchmarks for rail vehicle simulation[S].March 1998.
[3] 王福天.车辆动力学(第2版)[M].北京:中国铁道出版社,1994.
[4] Engineious.iSIGHT Reference Guide[Z].USA:Engineious Software,2004.
[5] Singiresu S.Rao.Engineering Optimization[M]JOHN WILEY&SONS,INC.2009.
