基于PLC、变频器的桥式起重机的改造
2010-04-27罗军
罗 军
(四川机电职业技术学院,四川 攀枝花 617000)
1 引言
随着生产规模的扩大,作为物料搬运重要设备的桥式起重机在现代化生产过程中应用越来越广,作用愈来愈大,对桥式起重机的要求也越来越高,是各类企业的工厂中不可缺少的起重设备之一。在某烧结厂桥式起重主要用来搬运原料,而现在大多数使用的是我国五六年代生产的串电阻调速桥式起重机,远远不能满足生产需要。本文提出采用PLC、变频器进行改造,实现桥式起重机电气自动控制,它可以减轻大大的劳动强度,提高劳动生产率。
2 桥式起重机传动控制存在的问题及解决方案
目前某烧结厂桥式起重机大车、小车、抓斗、卷扬、电动机均采用绕线型异步电动机,转子二次侧串电阻调速,由于反复短时运行,制动频繁,现场灰尘大,环境差,电机碳刷磨损快、滑环间容易短路放跑。并且电动机正反转的加速控制均采用交流接触器和时间继电器,交流接触器线圈经常烧坏,吊车司机使用凸轮控制器进行操作时,由于长时间运行,控制器磨损大,操作极不方便,维护量大,电机寿命短,控制线路复杂,严重影响企业正常生产。因此,要从根本上解决某烧结厂桥式起重机故障率高的问题,只有彻底改变绕线转子异步电动机二次侧串电阻调速方式。
随着电力电子技术的飞速发展,变频器+PLC控制技术日趋成熟,为在桥式起重机传动系统中的应用提供了有利条件。
3 变频器+PLC控制的优点
控制系统设计运用PLC、变频器进行改造,操作简单,运行可靠,故障减少。目前生产的高性能矢量控制变频器,具有可靠好,多功能,低噪音等优点。通过对电机磁通电流和转矩电流的解耦控制,实现了转矩的快速响应和准确控制,能以很高的控制精度进行宽范围的调速运行。
可编程序控制器是一种新型的具有极高可靠性的通用工业自动化控制装置,它以微处理器为核心,有机地将微型计算机技术、自动控制枝术及通用技术融为一体,具有控制能力强、可靠性高、配置灵活、编程简单、使用方便、易于扩展等优点,是当今及今后工业控制的主要手段和重要的自动化控制设备。可以这样说,到目前为止,无论从可靠性上,还是从应用领域的广度和深度上,没有任何一种控制设备能够与PLC相媲美。
由于西门子 S7-300 PLC可编程控制器具有结构紧凑、防尘、集成度高等特性。富士系列变频器具有无速度传感器矢量控制技术,当变频器有0.5Hz输出时即有150%以上的高起动转矩,保证悬空起动及低速运转时的电机力矩。速度调速偏差小。在提升设备中对防止“滑落”有很好的效果,适合于桥式起重机控制系统。
根据某烧结厂生产要求,结合实际,将桥式起重机大车、小车,抓斗、卷扬的上升、下降操作回路改为PLC控制,电动机由富士系列变频器控制,为了节约成本,大车、小车用原绕线型异步电动机二次侧保留一段常用电阻,使得电机在速度变化起始阶段变化较缓。桥式起重机抓斗、卷扬使用交流异步电动机。PLC电源块为PS307;10A,CPU为CPU314;根据I/O地址分配表输入点共有30点.所以选输入模块为SM 321(DI 8×120V/230V 共计4块);输出点为20点,故选择输出模块为SM 322(DO 16×DC24V/0.5A共计2块)。
3.1 PLC的I/O分配表(如表1~3所示)
3.2 部份设备型号选择(表4)

表1 3#槽及4#槽DI地址分配

表2 5#槽及6#槽DI地址分配

表3 7#槽及8#槽DO地址分配

表4

类型 型号 类别 数量大车:FRN45G11S-4 45kW 1富士变频器(根据电机容量) 抓斗、卷扬FRN132G9S-4JE 132kW 2大车 与FRN45G11S-4配套小车BUIII220-4 与FRN18.5G11S-4配套 1小车:FRN18.5G11S-4 18.5kW 1变频器制动单元 抓斗、卷扬 与FRN132G9S-4JE配套 2变频器制动电阻 抓斗、卷扬 与FRN132G9S-4JE配套 2小车:DBIII220-4 与FRN18.5G11S-4配套 1大车:DB45-4C电阻 与FRN45G11S-4配套 1
3.3 变频器参数设定(如表5所示)
部份参数设定如表5。
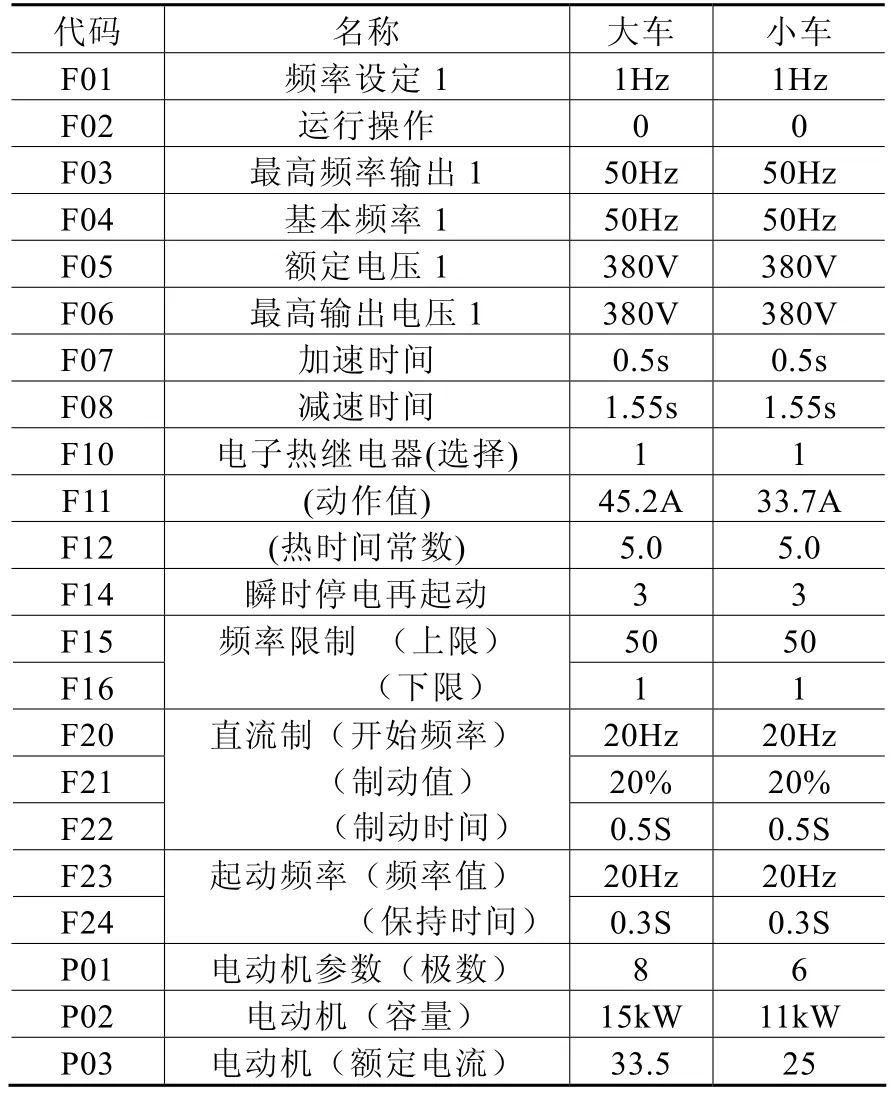
表5
3.4 PLC、变频器外部接线图(图1)
3.5 PLC程序(略)
4 PLC、变频器控制系统工作原理
4.1 系统调试
桥式起重机机大车走行电机变频器选用富士FRN45G11S-4,小车走行电机变频器选用富士FRN18.5G11S-4,抓斗、卷扬选用富士FRN132G9S-4JE。根据现场运行电机的实际速度测定,变频器参数设为5~8s内完成0~50Hz的变速过程,但电机正反运行变相时,变频器出现OU2(减速过电压)故障跳闸现象。经分析原因是电机在正、反转变相时,变频器输出也发生变化,即使在变频器输出为零时,电机因有惯性也在旋转,这样旋转的电机就会产生感应电压,将能量回馈到了变频器上,使变频器直流侧电压短时间内变化太快,产生过电压,造成变频器出现 OU2 故障而跳闸。为了解决这一问题,在变频器直流侧加装一个能耗制动单元,(进行制动时放电电阻请参照有关公式计算)。在运行过程中发现大车有晃动现象,通过多次实验将原绕线型电动机二次侧加装一段常留电阻,使得电机在速度变化起始阶段变化较缓,保证变频器的正常工作。通过对改进后的电机启动特性,满足工艺要求。
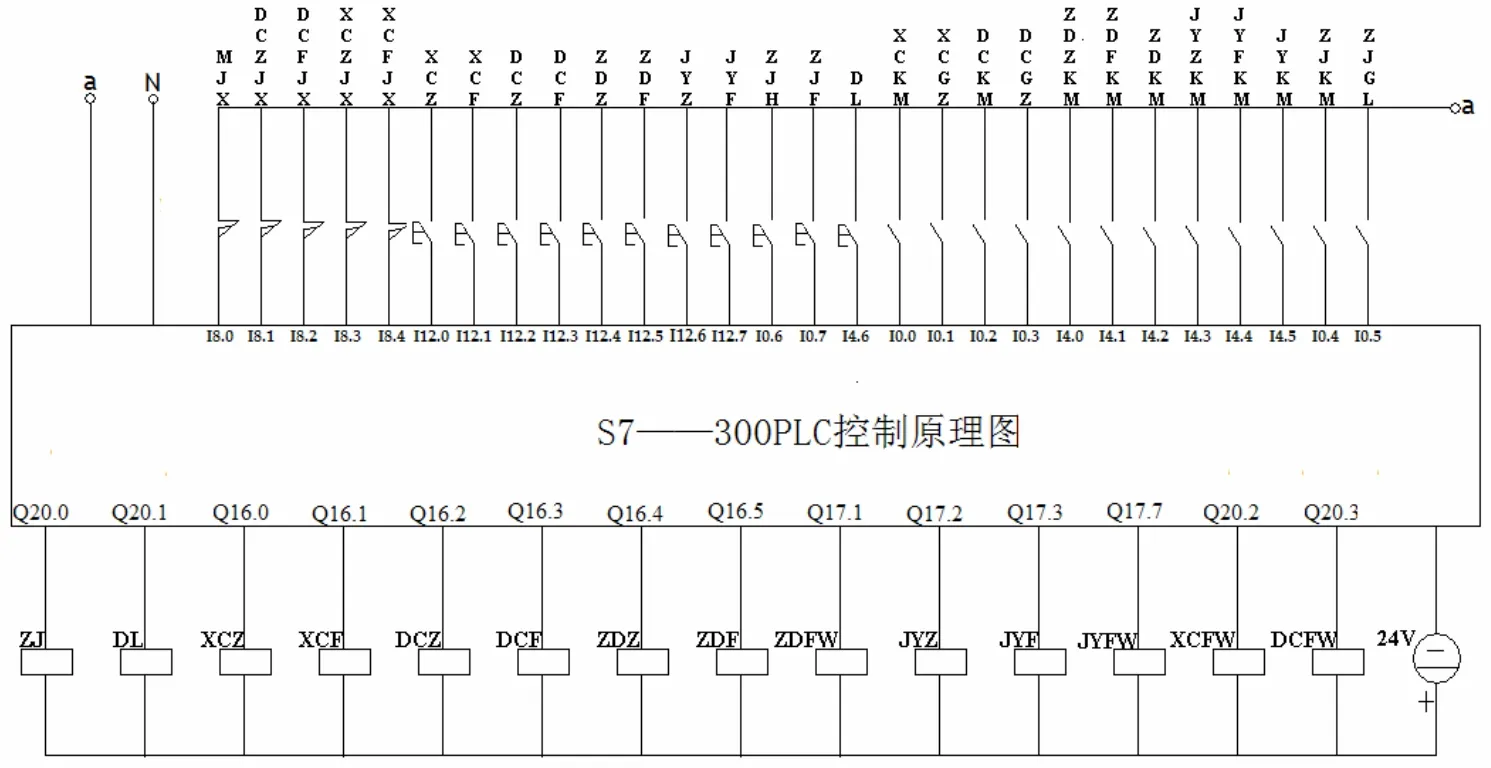
图1 I/O接线

图2 变频器接线图
在对 PLC应用程序进行调试过程中出现了一些问题,经过反复修改,最终均得到了解决。变频器功能参数的设置,直接关系到变频器与设备运行工况是否配合恰当的重要环节。比如电机参数、转矩控制方式、输出额定频率、加速时间、减速时间等参数的设定,均需通过起重机在使用过程中不断摸索修正。通过对参数的调整,使电机的起动电流、速度变化得到理想控制,完善系统的保护功能,达到动作可靠。
原凸轮控制器操作改为按钮控制,卷扬提升极限(改为光电开关)、门极限、大小车极限点,过流继电器上点等保护装置,作为PLC的数字量开入信号,增强了系统保护功能。抓斗、卷扬提升、开闭电机运行指令,大小车电机运行指令等由PLC发出。
桥式起重机机大小车走行电机变频器,从电机起动到稳定运行的过度过程在 0.5s内完成(实际应用时可以根据需要进行调整),抓斗、卷扬,设定提升和开闭电机的起动及加、减速时间,电机从起动到稳定运行的过度过程在 0.8s内完成(可以根据实际应用进行调整)。电机的起动和加、减速时间与生产操作工手动操作过程相近,保证电机运行的平稳性,合理地选择加减速方式。电机刚启动时以较低速度运行一段时间,然后再以与加速时间相对应的加速度将电机速度提高。减速过程与加速过程类似,这种方式可有效地减小电机启/停时的冲击电流。
4.2 操作说明
桥式起重机机械部份未作改动,原刀闸开关改为电源自动开关,直接给变频器供电,变频器出线接电机。(拆出不用的电阻箱)
(1)控制:桥式起重机大小车运行,抓斗开闭、卷扬上升、下降控制回路,变频器的启/停皆由PLC控制。应操作人员的要求,第一台操作台末作改变,其它各台由按钮控制。
(2)报警: 如果 PLC出现故障时,由 PLC输出指令 0.5秒内自动复位,也可在操作台上手动复位。紧急情况,吊车司机也可按“急停”按钮,切断主电源。
(3)连锁:起重机机上的各种极限正常,进出口的门关闭的状态下,才允许操作;设备在运行中触到某方向的极限时,设备自动停止;变频器中任意一台变频器报故障时,均立即停止工作;桥式起重机处于安全停止状态,同时抱闸合闸;在任何时刻断电,系统将立即停车,抱闸合闸。
5 结论
控制系统运用PLC、变频器改造以后,操作简单,运行可靠,维护方便,减少了交流接触器和时间继电器等电气元件,不仅节约了检修费用,并且提高了设备安全稳定可靠性。
实践证明:PLC、变频技术在桥式抓斗起重设备上的应用技术上是切实可行的,效果也较为显著,基本达到预期目标。
罗 军(1968-),大学本科,“双师型”老师,1990-2005年在工厂从事电气技术工作,2005年至今在四川机电职业技术学院从事电气自动化控制教学和电气自动控制研究。
