基于LabVIEW车体稳定性光电检测技术研究
2010-04-26徐熙平张国玉江苏省计量科学研究院中国航天南京晨光集团5所长春理工大学光电工程学院
张 帆 袁 锋 徐熙平 张国玉 苏 拾/.江苏省计量科学研究院;.中国航天南京晨光集团5所 .长春理工大学 光电工程学院
0 引言
车体稳定性测试主要用于坦克、自行火炮等武器装备射击过程中车体或其他相关部位的位移跳动量的动态测试。目前使用的划针、划板等机械方法精度低,技术落后,只能测试最大位移,不能提供位移-时间曲线,远远满足不了试验要求。为了更好地完成各项试验任务,提高动态测试技术水平,急需研制车体稳定性测试系统。本文提出的是一种采用光电位移传感技术、计算机控制与数据处理、结合位置传感器(PSD)等,能实现武器装备试验中稳定性测试的方法。利用计算机对位置点的处理,编制出功能较为完善的基于虚拟仪器的测量软件,同时还可以对测量数据进行数值分析,实现了高精度、自动化测试。
1 检测设备的工作原理
根据测量对象与测量参数的具体情况,采用光电非接触检测技术实现火炮稳定性的测试,由于火炮射击中的位移是多方向的,但通过分解后,可以用一个二维坐标系来描述各方向的位移变化,总体结构如图1所示。
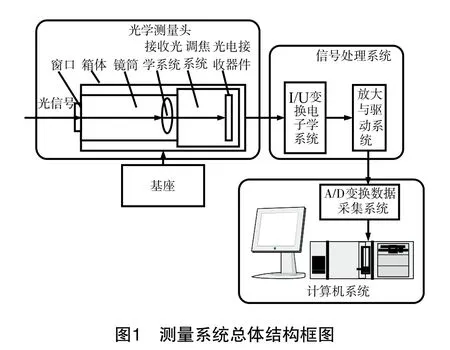
车体稳定性检测系统的主要原理是车体携带发光二极管发出的单色光,经滤光片滤光消除杂光干扰,经过接收光学系统聚焦后汇聚入射到面阵光电位置传感器(PSD)的光敏面上,根据PSD器件的工作原理,产生反映光斑位置的电流信号。从PSD输出的是电流信号,经过I/U变换电子学系统,形成电压信号,由于信号比较弱,进行信号的放大处理,放大后的电信号再通过数据采集卡的A/D变换器,将PSD上的模拟信号转换成数字信号,计算机系统采用基于LabVIEW语言的软件进行数据处理。当被测对象发生移动时,被测对象携带的光源同步移动,这样光信号经接收光学系统成像到面阵PSD上的像点会发生变化。此变化反映被测对象的二维位移量,通过电子学信号处理与计算机系统数据处理可得出被测对象的移动坐标和移动曲线,以实现稳定性的测量。
2 检测设备的组成
2.1 接收光学系统
在设计接收光学系统时,除考虑其成像质量之外,还必须选择一定大小的接收孔径,使PSD能探测到该孔径下的光能,在结构允许的条件下,尽量选择大一些的孔径以满足PSD最小可探测能量的要求。如图2所示,成像接收光学系统的作用是将在工件上的光源聚焦成像在PSD上,这样才可测出该点的位置。在进行光学系统设计时要考虑的就是投射在被测表面的光斑,不管怎么小,总还是一个小的圆形面积,一般表示其空间位置的应该是几何中心。
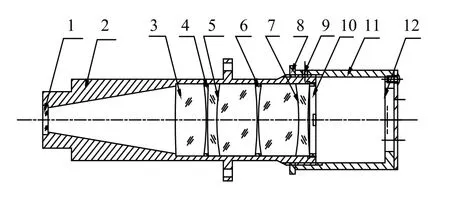
图2 接受光学系统结构
2.2 位置传感器(PSD)
PSD的工作原理是基于半导体的横向光电效应,其结构原理如图3所示。由三层构成,最上层是P层,下层是N层,中间插入一个较厚的高阻I层,形成P-I-N结构,此结构的特点是I层耗尽区宽,结电容小,光生载流子几乎全部都在I层耗尽区中产生,没有扩散分量的光电流,因此响应速度比普通P-N结光电二极管要快得多。当PSD表面受到光照射时,在光斑位置处产生比例于光能量的电子-空穴对流过P层电阻,分别从设置在P层相对的两个电极上输出光电流I1和I2,由于P层电阻是均匀的,电极输出的光电流反比于入射光位置到各自电极之间的距离,光电流I1和I2可以用下面两种方式表示:
(a)当坐标原点选在PSD中心时:

(b)当坐标原点选在PSD一端时:

可知I1和I2是光能量(I0)与位置的函数,实际应用中,由于光源光功率的波动及光源与PSD间距离的变化,I0并不是一个恒定值,为了消除I0的影响,通常把输出电流的差与和相除作为位置检测信号,即:
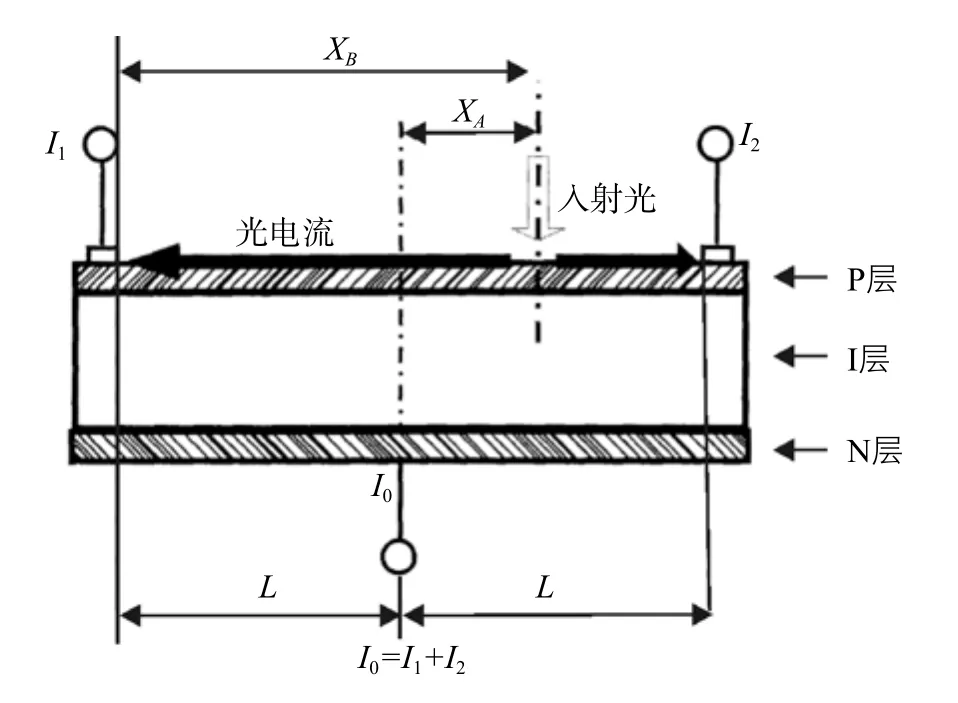
图3 PSD结构原理
当坐标原点选在PSD中心时:

当坐标原点选在PSD一端时:

只要检测出I1和I2的大小,即可以算出光点所在的位置。
由式(4)或(5)可知,PSD输出的光电流仅与入射光点位置有关,与入射光能量和角度无关。
可采用图4所示电路,经过滤波→电流/电压转换→精密放大→加法和减法→除法电路,按照公式(4)或(5)运算获得入射光点的位置X。
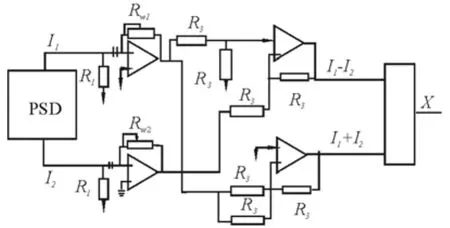
图4 PSD入射光点位置运算电路(Y方向电路相同)
2.3 数据采集卡
采用凌华公司的DAQ-2010 PCI 4通道、2MS/s同步A/D多功能采集卡。特性如下:
(1)32位PCI总线,即插即用
(2)4通道同步模拟量输入
(3)14位A/D分辨率,采样频率最高可达2 MHz
(4)双极性/单极性模拟量输入
(5)8 K A/D采样FIFO
(6)双极性/单极性模拟量输出
(7)每通道1 K输出数据FIFO
(8)系统同步接口
(9)完全自动校准
(10)完全软件配置
(11)易于升级到Compact PCI架构
广西建立了财政部门、主管部门协同管理专项转移支付的机制,在分配、下达、执行、监督、绩效方面进一步厘清部门之间对专项转移支付管理的责任和权力。如在分配环节,主管部门要在每年10月20日前研究提出资金分配方案,需要报自治区政府审批的,要求在每年10月15日前研究提出资金分配方案。在下达环节,财政厅会同主管部门在自治区人大审查批准自治区本级预算后60日内印发下达专项转移支付预算文件。在绩效管理方面,主管部门要编制绩效目标,实施绩效监控,开展绩效评价等。协同管理的机制,进一步明晰了责任,形成了对专项转移支付管理的合力。
3 数据处理
3.1 LabVIEW的特点
LabVIEW(Laboratory Virtual Instrument Engineering Workbench)主要用于仪器控制、数据采集、数据分析等领域。
一个LabVIEW程序包括三个主要部分:前面板、框图程序、图标/接线端口。前面板是LabVIEW程序的交互式图形化用户界面,用于设置用户输入和显示程序输出,目的是仿真真实仪器的前面板。框图程序则是利用图形语言对前面板上的控制量和指示量进行控制。图标/接线端口用于把LabVIEW程序定义成一个子程序,以便在其他程序中加以调用,这使LabVIEW得以实现层次化、模块化编程。
3.2 数据采集系统硬件和软件
数据采集系统由位置传感器(PSD)、数据采集卡、信号调理电路和计算机几部分组成。由于火炮发射过程很短,采用型号为S1880的面阵PSD,利用它的横向光电效应,在光敏面的两个不同电极之间就会产生电压,它的位置分辨率能达到10 μm。考虑到振动信号的快速响应,采用高性能的DAQ2010采集卡进行A/D模数转换,完成数据的采集处理,其采样速度可达到2 MSa/s,四个通道可以同时传输数据。图5和图6是基于LabVIEW火炮车体稳定性检测程序前面板和程序框图,数据采集卡采集了两路模拟电压信号,经过A/D转换,变成两路X和Y的数字信号,并且在一个二维图形上显示。
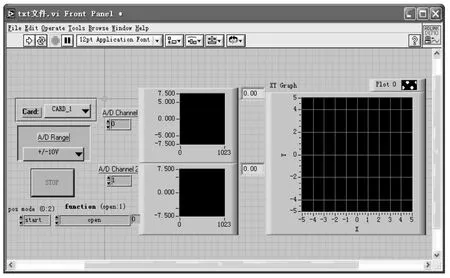
图5 基于LabVIEW火炮车体稳定性检测前面板
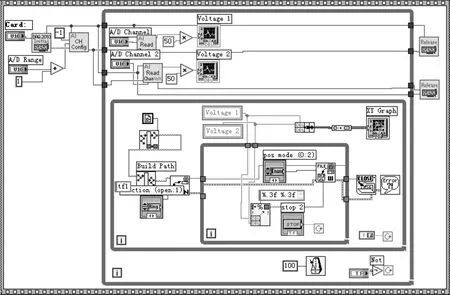
图6 基于LabVIEW火炮车体稳定性检测程序框图
4 检测设备精度分析
仪器的精度是精密加工设备、精密测量仪器和其他精密装备的最重要技术指标之一。
本测量随机误差主要来自下面四个方面:
(1)光学系统误差
(2)PSD非线性误差
由于采用的PSD器件的位置坐标是枕形失真的,所以器件存在非线性误差。为了得到实际的位置坐标,就必须进行非线性校正,一般有以下两种方法:线性插值法和变换系数法。这两种方法都需要建立数据库,数据库的大小由系统所要求达到的位置分辨率来决定。分辨率越高,扫描的点数就越多,数据量就越大,位置坐标的线性度就越好。
(3)背景光带来的误差
尽管实际操作中采取了滤光片来消除杂光的影响,但背景不可能完全消除,随着信号光强的减弱,背景光的影响越来越明显,即信噪比k也随着明显下降,背景光除了覆盖整个敏感面的稳定漫射型背景外,还可能有周期性背景、集中型背景等。对于周期性背景,可以设计一种陷波滤波器,去除背景影响。而对于集中型背景及均匀稳态背景,在无法采用调制光源时,可充分利用PSD光强信号管脚所提供的强度信息。
(4)系统响应速度带来的误差
系统需要高速采样的实时控制与数据存储,可是PSD响应速度是有限的,这样就带来了系统误差。要解决这些问题,在软件设计时可以采用缓冲技术、高速磁盘流技术、特殊采样技术等。
另外,在实际操作的时候,一些现场因素可能也会给系统带来误差,如车体本身的震动、灰尘等。
5 结束语
本文所论述的设备已经进行了相关的试验,能够达到使用精度要求。方案采用了位置敏感器(PSD)和计算机实时控制与数据处理等多学科技术研制了火炮稳定性光电检测系统,解决了火炮稳定性的非接触检测难题,提高了检测速度和精度。该检测系统的检测原理和方法可普遍适用于其他稳定性的非接触式光电检测,因此对国防和民用工业都具有广阔的应用前景。
[1]宋康, 赵玉龙 .基于PSD的微轮廓测量仪机器控制系统的研究[J].仪器仪表学报, 2002, 23.
[2]曾超,李锋.光电位置传感器PSD特性及其应用[J].光学仪器, 2002,24(4).
[3]Lee, W; Hall, NA; Degertekin, FL,A grating-assisted resonantcavity-enhanced optical displacement detectionmethod for micromachined sensors[M].Applied Physics Letters,2003,3032-3034.
[4]韩慧莲,徐晓东等.虚拟仪器软件平台设计[J].测试技术学报.2002(1):1~3.
