基于动态规划的多目标的TBD算法*
2010-04-26胡琳万洋
胡 琳 万 洋
(空军雷达学院研究生管理大队 武汉 430019)
1 引言
随着科技的不断发展,人们希望提高对弱小目标的检测能力。检测前跟踪(TBD)与检测后跟踪(TBD)处理方式是不同,它不是通过每一帧检测得到结果,而是将各扫描时刻的信息相关处理,经过多次扫描时刻的累积后再判断得到检测结果。这样可以有效地提高雷达的检测性能,但在利用TBD算法进行多目标检测与跟踪时,问题将变得更加复杂。这是因为在潜在目标数未知的情况下,这些算法很容易丢失部分目标或者产生较多的虚警[1]。
动态规划算法最早是由美国数学家贝尔曼等[2]于1951年提出的,基本思想是采用多阶段决策策略,将一个N维问题转换为N个一维问题,对问题进行分级处理。动态规划算法已经广泛应用到各个领域。动态规划算法进行雷达弱目标的检测领域里,研究工作多是针对于单目标进行检测的,目前很少将动态规划用在多目标检测中。曲长勇等[1]提出了一种基于动态规划的多目标检测前跟踪算法。该算法能够比较准确地估计搜索空间中潜在的目标数量,并且最佳地分离出每个目标的航迹,从而较好地解决了以往检测前跟踪算法在目标数量未知的条件下容易出现漏警和虚警较多的问题,但所选取的目标个数与搜索区域中实际存在的目标数量不一致时,算法性能下降。宋慧波等[3]提出了通过求极值实现了对多目标的检测。文中将研究动态规划算法在TBD技术上的多目标检测。直接将动态规划 TBD算法用在多目标检测中,该算法在单目标累加过程中都有能量扩散的问题,在多目标检测中同样也存在这个问题。但在多目标检测中这个问题更突出,特别是在多目标相交的位置,因为这个位置是两个目标的能量叠加,所以此位置能量最大,扩散的区域很大,能量团聚的区域比单目标的区域要大得多,在此区域内无法得到目标的轨迹,这样在检测目标的实际应用中会在此区域内丢失目标,在文中将针对动态规划算法运用在多目标检测的这缺点,并给出了改进的适用于多目标检测的动态规划TBD算法。
2 基于动态规划的TBD基本原理
基于动态规划的TBD算法能以有效的方式对所有可能的目标航迹进行搜索,并对这些可能航迹上的量测进行积累,当航迹上的量测积累值超过门限时,就称检测到目标,并回溯航迹。
2.1 目标运动模型和测量模型
假设目标做匀速运动,在第k次扫描时目标的状态为X(k)=(xk,yk,k,k)T,xk 和 yk 表示目标的坐标,k和k表示相应的速度。则目标的运动状态方程为

其中 f(◦)表示状态转移函数,V(k)表示过程噪声,服从高斯分布。在第k次扫描后,目标在第(i,j)个单元(i=1,2,…,M;j=1,2,…,N)的测量值为

式中A(k)表示目标信号幅度,文中假设为常数A,Wij表示测量噪声,服从高斯分布。目标航迹定义为从1时刻到K时刻的一系列连续的目标状态为XK={X(1),…,X(K)}。雷达第k次测量的数据表示为Z(k)={zij(k)|i=1,2,…,M;j=1,2,…,N}。动态规划要解决的问题就是:希望能够根据从初始时刻到K时刻的所有测量数据ZK={Z(1),Z(2),…,Z(K)},来确定最有可能是真实目标的航迹K,使K满足[4]:

其中VT表示在第K帧数据空间的门限。
2.2 目标状态转移
状态转移在动态规划TBD算法中占有很重要的位置,它直接影响到算法计算量的大小。所谓状态转移就是指目标点经过一定的时间延迟下一帧可能出现的位置及状态,这些位置区域是以目标当前位置为中心,由目标运动速度的大小,抖动及其它因素影响形成的环形区域,如图1环形区域。目标当前的位置为(i,j),运动的速度v∈[vmin,vmax],经过时间t,状态转移间距为(rmax-rmin)环形区域中。其中rmin=vmint,rmax=vmaxt,t为相邻两帧的时间间隔。
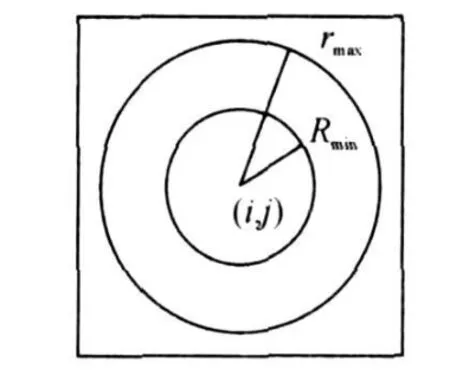
图1 状态转移示意图
我们常用q来表示状态转移的区域大小,如q=9,表示以当前位置为中心点转移到下一帧状态的3×3邻域,共有 9个像素点,q的大小正比与速度v。
3 基于的动态规划多目标的TBD算法
将动态规划思想运用到TBD技术中,一般研究多针对其在高斯噪声下单目标的检测,很少将其用在多目标检测中。对于直接将动态规划TBD算法运用到多目标检测中,由于目标的个数或交叉的影响,能量团聚的区域较大,在此区域无法判断目标的位置,严重的影响了检测结果。但是在短时间内,目标的轨迹可以看作是一条直线,可以利用Hough变换[5]对直线检测的优点,将Hough变换引入到动态规划的TBD算法中,不但可以对检测单目标,也可以检测多目标。所以文中将提出一种DP-Hough的多目标TBD算法。其流程图如图2所示。

图2 DP-Hough的多目标TBD算法流程图
文中描述的多目标的检测系统主要包含四个步骤:DP算法、检测、航迹恢复和Hough变换算法。鉴于DP-TBD算法的良好性能,首先对雷达检测的数据进行DP-TBD算法生成目标航迹以及部分杂波数据,然后将其进行Hough变换及反变换得到最终的检测结果。
DP-Hough算法如下:
步骤1:初始化。对于第一次扫描第(i,j)单元,f1=zij(1),ΦX(1)(1)=0。ΦX(1)记录有动态规划确定的目标状态序列。

步骤5:Hough变换。对于动态规划算法后的航迹估计的每个数据点(xi,yi),对于自变量参数θ的每个离散取值θk计算ρ:

然后将所有 ρik(i=1,2,3,…,n;k=1,2,3,…,h)保存到矩阵ρ中。
步骤6:寻找局部峰值。在参数空间中积累矩阵中寻找局部峰值 A(ρpeak,θpeak)且 A(ρpeak,θpeak)>T(T表示阈值)。
步骤7:Hough逆变换,检测目标轨迹。由峰值参数(ρpeak,θpeak)确定的直线,直线检测完毕。
4 仿真实验
在直角坐标系下,目标的运动状态方程为
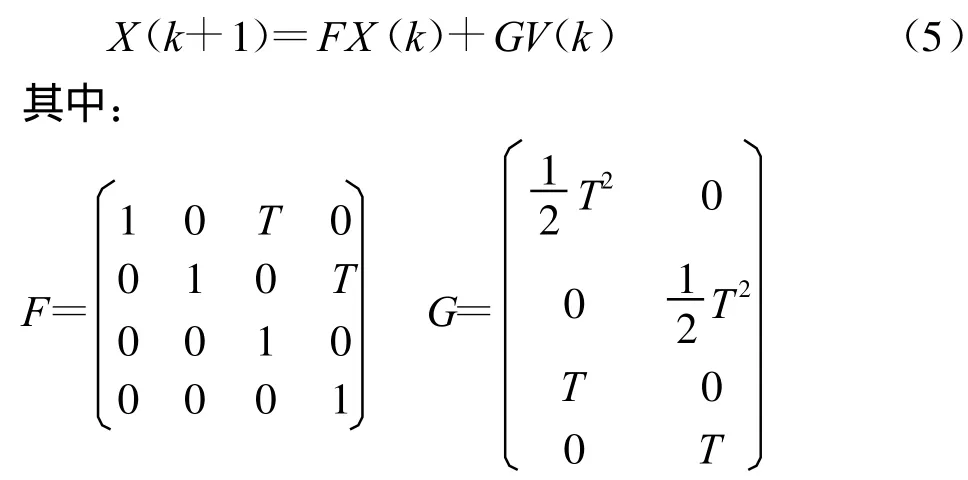
T表示天线扫描周期,扫描周期间隔为1s,Wij(k)~N(0,1)表示过程噪声,服从高斯白噪声。目标在高斯分布的背景下匀速运动。下面以检测两个匀速直线运动的目标为例,扫描次数为20次,扫描时间间隔为1s的条件下,比较标准Hough变换算法、动态规划算法和DP-Hough算法检测目标性能。两个目标的初始状态X1(0)={3.0,3.0,3.0,3.0},X2(0)={3.0,64,2.0,-2.0}。
图3 SNR=8时的第一帧图像
图 3给出了信噪比SNR=7dB时的第一帧量测数据,幅度大小用灰度表示,目标1在x=3.0,y=3.0初,由图可知目标完全淹没在噪声中,根本辨别不出来目标的位置。
图4给出了SNR=8的3种算法的目标跟踪图。图4(a)为两个目标的真实轨迹。图4(b)给出了DP-TBD检测多目标的跟踪轨迹,从图中可以得出在目标相交的位置周围出现能量团聚,很明显在这个区域内跟踪不到目标。图4(c)给出了标准Hough变换的TBD检测结果,从图中可以得出检测到的目标不只两个,而是三个。图4(d)给出了文中提出的算法,可以清楚地看出检测到两个目标轨迹。
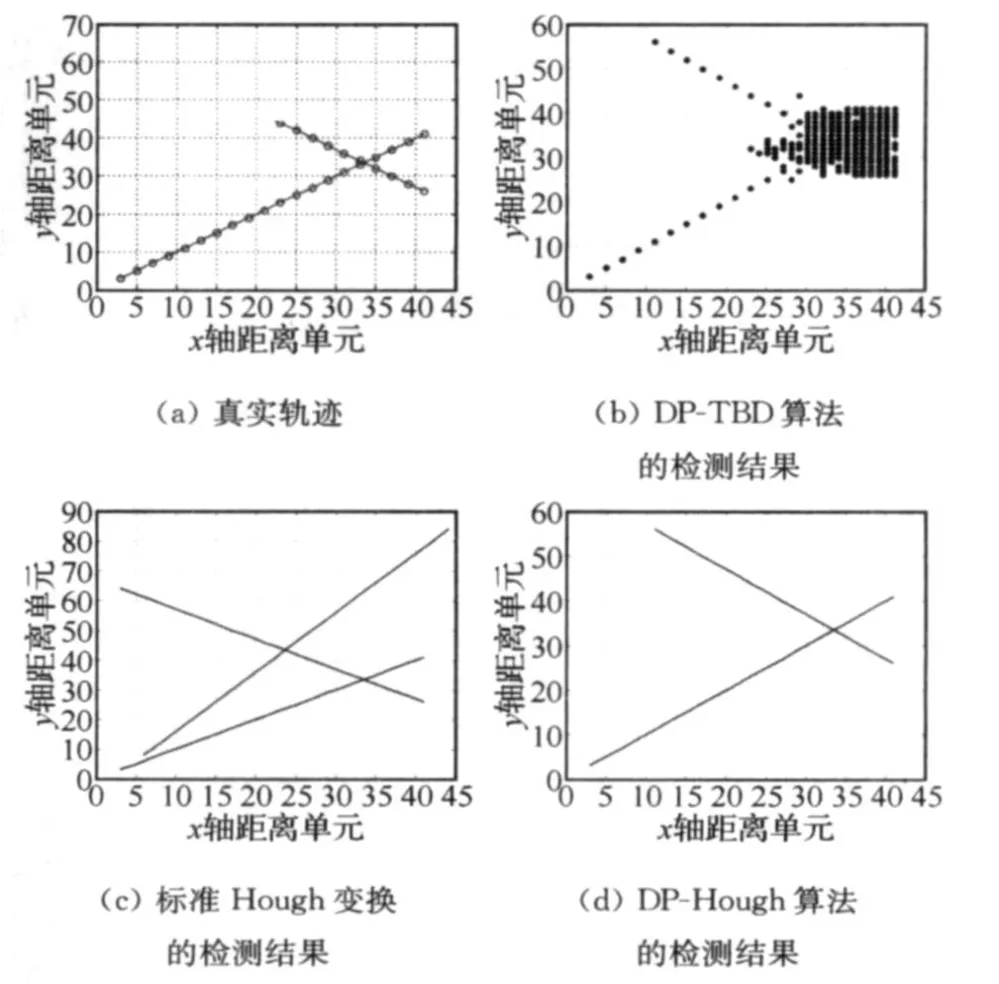
图4 三种算法的目标检测结果
5 结语
文中在原有的动态规划算法上研究多个弱小目标的情况下的DP-TBD算法。提出的基于动态规划的多目标TBD算法结合有多弱目标存在的情况下雷达回波积累后数据图像的特点引入了Hough变换改进了动态规划检测前跟踪算法不但能比较准确地估计出目标数量,而且还能分离出每个目标的航迹,利用了Hough变换检测直线的优点。仿真结果表明在多个弱小目标的情况下,改进的算法的检测性能和跟踪性能都优于传统的动态规划算法与Hough变换算法。
[1]曲长文,黄勇,苏峰.基于动态规划的多目标检测前跟踪算法[J].电子学报,2006,34(12):2138~2141
[2]Bellman,R.Dynamic Programming[M].Prunceton,New Jersey:Princeton University Press,1957
[3]宋慧波,高梅国,田黎育,等.一种基于动态规划法的雷达微弱多目标检测方法[J].电子学报,2006,34(12):2142~2145
[4]吴为,陈建文,王永良,等.一种基于动态规划的弱目标检测方法[J].空军雷达学院学报,2008,22(1):18~21
[5]Barbarossa S,Zanalda A.A combined Wigner-Ville and Hough transform for cross terms suppression and optional detection and parameter estimation[J].Proc IEEE ICASSP,1992(5):173~176
