坐标框架转换若干问题的研究①
2010-04-26成英燕
刘 立,成英燕
(中国测绘科学研究院,北京100039)
0 引 言
ITRF(InternationalTerrestrialReference Frame)地球参考框架是国际上公认的精度最高、稳定性最好的参考框架,ITRF是利用全球测站观测资料成果推算所得到的地心坐标系统。确切地说,ITRF是一个四维地心坐标参考框架,它除了具有空间直角坐标形式的坐标外,还给出了台站的漂移速度,其坐标精度为毫米级至厘米级。IT RF采用了VLBI、SLR、LLR、DORIS和GPS等多种空间技术[1,2],综合了多个数据分析中心的解算结果形成的地球参考框架,最后,利用一系列测站相对于某一参考历元的坐标和位移速度构成国际参考框架(IT RF)。由于各 IERS(International Earth Rotation and Reference Systems Service)分析中心分析方法、观测方法和数据处理方法的不断提高,根据最终结果建立的IT RF框架之间的差别越来越小,目前达到毫米级的精度,不同参考框架同一时期的坐标可以相互转化[3]。
1 IT RF框架的相互转换
从理论上说来,IT RF系列所对应的地球平极和平均格林尼治子午线应该是重合的,但由于ITRF参考站的坐标是通过观测获得的,其观测手段和观测精度会有所不同,因此,各个系统之间也会存在微小的系统差别。不同ITRF框架可以通过坐标系之间的相似变换进行转换。通常,IT RF转换使用14个转换参数,即7个转换参数加上7个转换参数速率,这14个转换参数是由布尔莎-沃尔夫七参数得到的[4]。

其中:
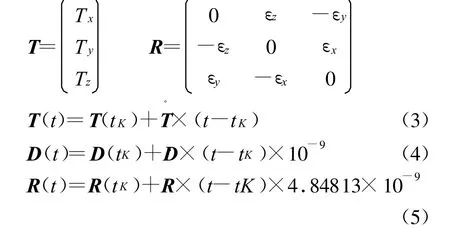
14个旋转参数也和t时刻到to时刻的速率有关:
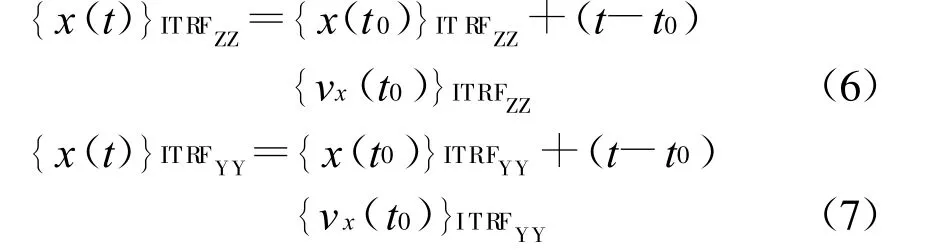
因此可得到:

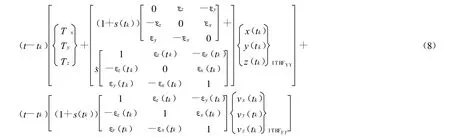
其中:

tk是旋转参数给定的时刻,t0是参考框架的初始时刻,t是最终要转换的时刻。s是框架之间的比例尺变化(ppm×10-6),表1是 ITRF00到IT RF97的转换参数。

表1 IGS(ITRF2000)→IGS(ITRF97)(tk=2001.5)的14个转换参数[2]
2 trnfsp3n应用程序
T rnfsp3n从互联网上(ftp://macs.geod.nrcan.gc.ca/pub/requests/itrf96_97/)获得。它可以把不同框架下的IGS的sp3和erp文件转换到相应的参考框架下,也可以把观测站的坐标转化到想得到的参考框架下,但是文件的格式一定要符合要求[1]。
应用程序的使用方法为
T rnfsp3n inputfile(sp3)outfile transfile[input(erp)output(erp)]
其中:Inputfile(sp3)是标准的sp3格式的文件,transfile是不同参考框架之间的14个转换参数(T1T2T3D R1R2R3﹒T1﹒T2﹒T3﹒D ﹒R1﹒R2﹒R3),[input(erp)output(erp)]是可选的erp文件。
Eg:trnfsp3n igs10210.sp3 igs10210.itr96 ITRF96.itr97 igs10217.erp igs10217.erp96是把ITRGF96下的igs10210.sp3和igs10217.erp文件转换到ITRGF97框架下。此应用程序还可以把IGS站的坐标转换到需要的参考框架下。
Trnfsp3n ITRF94.13 ITRF96.out ITRF96.itr94是把IT RF94框架下的13个站的坐标转换到ITRF96框架下。
注意:erp文件的MJD(简化儒略日)必须在MJD 50243(Wk0857)之后。
3 算 例
从网站下载数据,广播星历:jplm0010.99n、jplm0020.009n,精密星历:igs09905.sp3、igs09906.sp3,观测值文件:blyt0010.99o、blyt0020.99o、jplm0010.99o、jplm0020.99o、kokl0010.99o、kokl0020.99o。
此精密星历使用的是IT RF96框架,利用trnfsp3n.exe生成ITRF97、IT RF00和IT RF05框架下的精密星历文件。利用GAMIT软件进行数据处理,并且对不同框架下的13个IGS站的坐标进行了分析[6,7],如表2~表5,图1~图4所示。
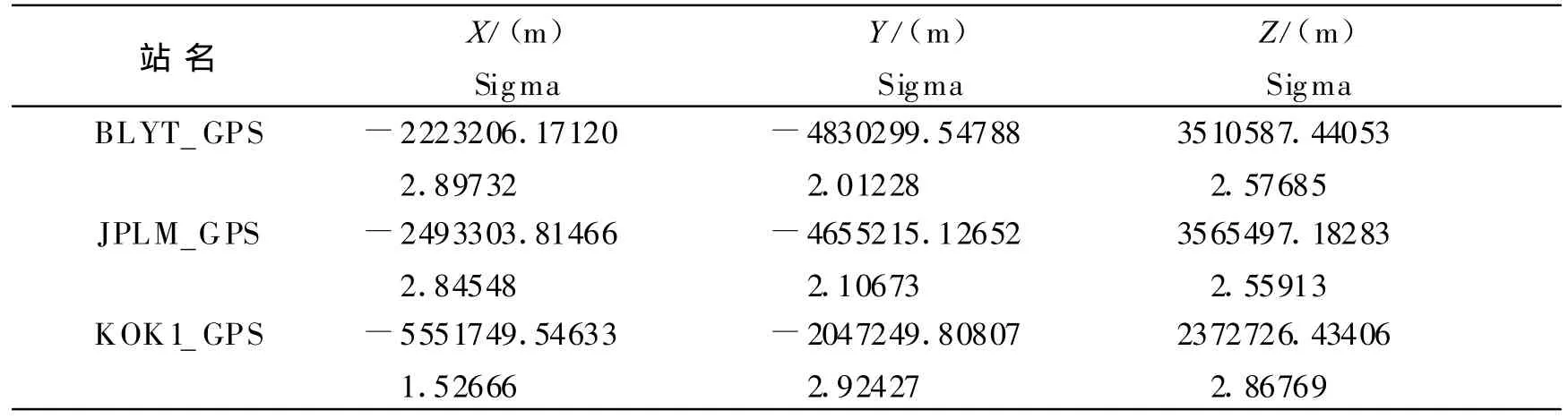
表2 ITRF96框架下计算的观测站的坐标
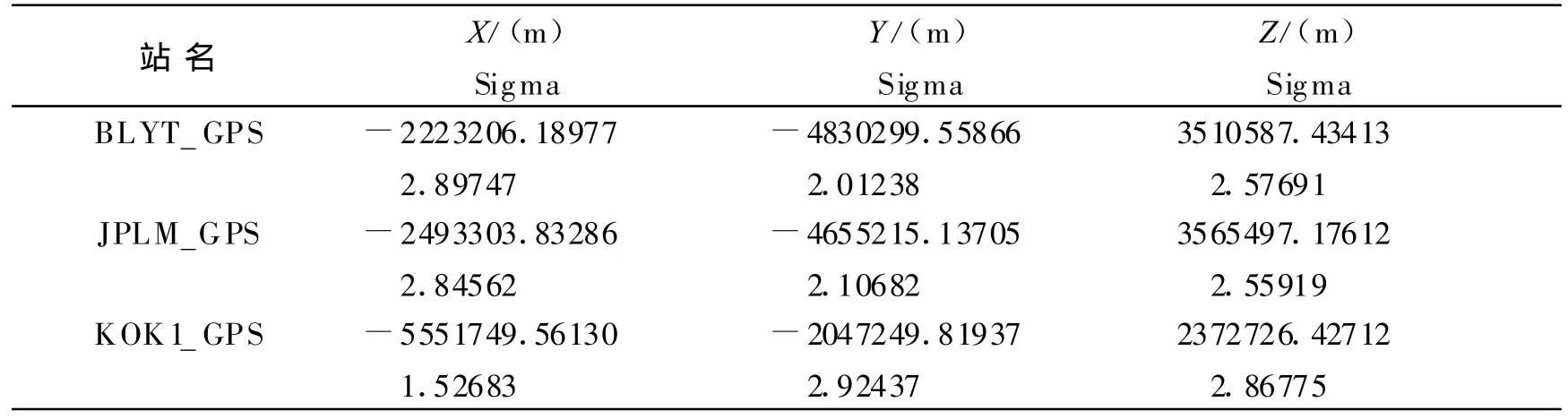
表3 ITRF97框架下计算的观测站的坐标
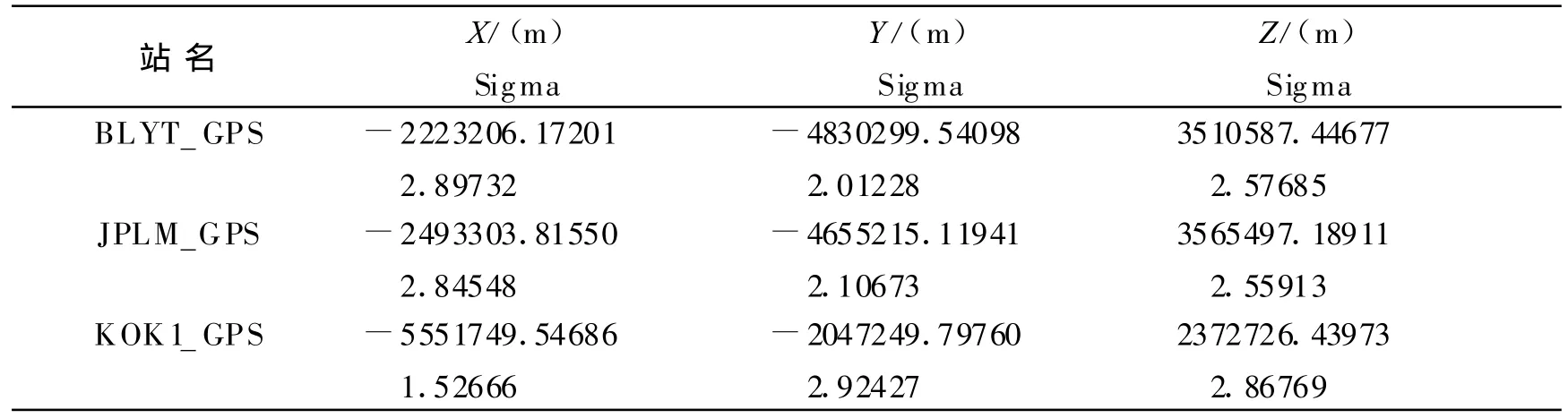
表4 ITRF00框架下计算的观测站的坐标

表5 ITRF05框架下计算的观测站的坐标:
从以上各表和图中可以看出:在IT RF96和ITRF97中x坐标分量相差(1 cm~3 cm),y坐标分量相差(1 cm~2 cm),z坐标分量相差在1 cm之内;在IT RF97和ITRF00中x坐标分量相差(1 cm~2 cm),y坐标分量相差(1 cm~2 cm),z坐标分量相差在1.5 cm之内。在IT RF00和ITRF05中x、y、z坐标分量相差毫米级。ITRF96、ITRF00和IT RF05的中误差几乎相同,IT RF97的中误差相对比较大些,所以ITRF96、IT RF00和ITRF05的精度基本相同,而且IT RF05解算的结果已达到毫米级的精度。

4 结 论
由于各IERS分析中心分析方法、观测方法、数据处理精度方法的不断提高和IGS永久站数量的增加,使得IT RF坐标和速度解的质量越来越高,根据最终结果建立的ITRF框架之间的差别越来越小,目前已到毫米级的精度。从算例中可以看出,在不同的IT RF框架下计算的结果也有所不同,但之间的差别不大。最新的IT RF参考框架下计算的结果已达到毫米级的精度,比以前的在ITRF下解算的精度有所提高。
[1] 李征航,黄劲松.GPS测量与数据处理[M].武汉:武汉大学出版社.2005.
[2] 徐天河.V LBI、SLR、GPS综合数据处理与坐标转换若干问题研究[D].解放军信息工程大学,2001.
[3] 党亚民,秘金钟,成英燕.全球导航卫星系统原理与应用[M].北京:测绘出版社,2007.
[4] Toma's Soler John Marshall.Rigorous transformation of variance-covariance matrices of GPS-derived coordinates and velocities[J].GPS Solutions,2002,5(6):76-90.
[5] Jan Kouba.THE GPS.TOOLBOX IT RF TRANSFORMATIONS[J].GPS Solutions,2002,5(3):88-90.
[6] T.A.Herring,R.W.King,S.C.Mc Clusky.Introduction to GAMIT/GLOBK Realease 10.3[M].Departement of Earth,Atmospheric,and Planetary Sciences Massachussetts Institute of Technology,2006.
[7] T.A.Herring,R.W.King,S.C.Mc Clusky.GLOBK Reference Manual Realease 10.3[M].Departement of Earth,Atmospheric,and Planetary Sciences Massachussetts Institute of Technology,2006.