SINS/GPS/LORAN-C多传感器组合导航系统研究*
2010-04-26黄显亮温连峰孙铭明
黄显亮 温连峰 孙铭明
(92956部队 大连 116041)
1 引言
导航系统在国防和诸多国民经济领域广泛应用;同时导航系统提供的位置、速度和时间等信息,也是完成部队的调动部署、指挥作战、综合保障,以及武器平台的应用中不可缺少的支柱,导航战已经成为现代战争的重要组成部分,近年来在国际上发生的一些战争,无不验证了导航在现代战争中的重要地位。可是现有的单一导航手段难以满足高可靠(容错)、高定位精度、高抗干扰、高自主、高隐蔽、全球性和实时性的导航要求。因此,组合导航的研究已经越来越为人们所重视。
现阶段的组合导航系统多以惯性导航系统为主系统[1],其它导航系统辅助惯导来提高导航精度和系统的可靠性。卡尔曼滤波器是组合导航信息处理的关键性技术,而联邦卡尔曼滤波器已被美国空军实验室选为下一代容错导航系统的基本滤波方法。
本文根据捷联惯导(SINS)、GPS、Loran-C的特点,建立了SINS/GPS/Loran-C多传感器组合系统的滤波模型,并进行了联邦卡尔曼滤波器的设计。在进行了比较充分的理论分析基础上,利用实测的静、动态数据对多传感器组合导航滤波器进行了验证实验,给出了部分系统参数的曲线图,通过理论分析和实验证明:本文应用的联邦卡尔曼滤波器是可行的。
2 组合导航系统联邦卡尔曼滤波器设计
本文设计的SINS/GPS/Loran-C组合导航系统的联邦卡尔曼滤波器结构如图1所示[2~3],采用间接、闭环反馈校正的滤波器设计,各子滤波器是次优滤波,主滤波器是全局最优滤波。联邦卡尔曼滤波器具有容错和检测故障的能力,局部滤波器LF1和LF2有相同的输出,但是精度不同。局部滤波器LF1(用于SINS与GPS组成的子系统)的精度比局部滤波器LF2(用于SINS与Loran-C组成的子系统)的精度高。LF2的主要目的是用来改善系统的可靠性和容错能力,尽管它不能使系统的精度有明显的改善。

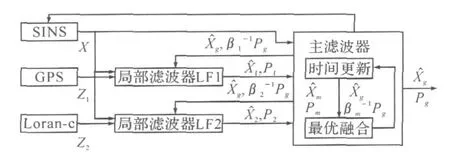
图1 SINS/GPS/Loran-C组合导航系统中的联邦卡尔曼滤波器
2.1 组合导航系统状态方程的建立
1)基本导航系统SINS
本组合导航系统是针对二维导航定位设计,采用北东地的地理坐标系作为导航坐标系,所以不考虑 SINS 的高度信息(δ h),地向速度信息(δ VD)和加速度计地向漂移信息(▽D),因此根据文献[2]和文献[5]可得本组合导航系统中SINS的状态矢量为:
其它各参数的定义详见参考文献[2]。
2.2 组合导航系统测量方程的建立
在本组合中,子系统GPS、Loran-C为观测系统,取SINS系统给出的经度、纬度和GPS系统或Loran-C系统输出的经度、纬度的差作为观测量,观测量依次为:

2.3 组合导航系统的仿真
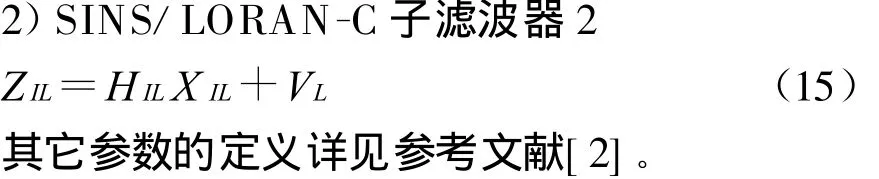
由于导航系统是时变的,组合系统的系统矩阵和量测矩阵的确定都与载体的位置、速度有关,因此进行仿真前,首先要设计载体的航行轨迹以提供量测值[6],仿真中的航行轨迹尽可能接近实际情况,包括舰艇的典型机动动作,以反映组合系统在各种情况下的性能。航行过程包括:加速、巡航、转弯等阶段,系统仿真时间共3600s,同时为了使各子滤波器的输出信息同步,设GPS和 Loran-C的信息输出间隔都是5s。设载体的初始位置为北纬38°,东经 121°,初始航向 180°,初始速度为 0m/s,SINS由低精度元件构成,陀螺时间相关漂移0.1(°)/h,陀螺白噪声漂移 0.1(°)/h,加速度计零偏10-3g。平台初始误差角取北向100″,东向100″,水平速度误差为1m/s,水平位置误差为100m,选取北东地的地理坐标系为导航坐标系。具体的理论仿真结果如图2~4所示。
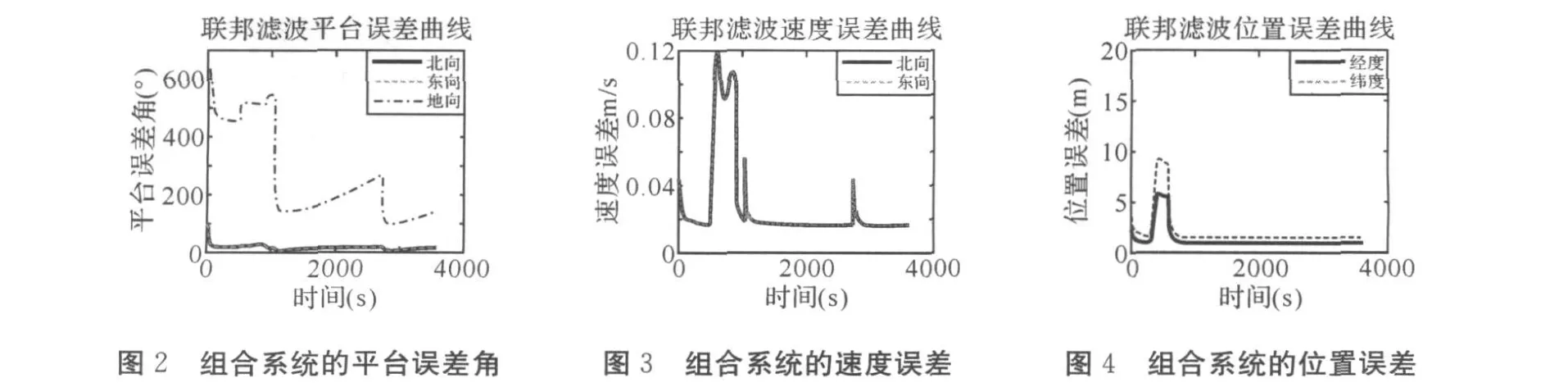
由图2~4可以看出:组合系统的速度误差、位置误差、平台水平误差角都迅速收敛并稳定,导航系统的性能得到改善。为了验证联邦卡尔曼滤波器的容错性能,在仿真过程中的600s~800s之间人为设置GPS信号无效,由图3和图4可以看出,重构后的SINS/Loran-C组合系统在750s附近开始迅速收敛,误差逐渐减小,SINS/GPS/Loran-C在800s重新组合后,误差继续减小,最后速度误差稳定在小于0.02m/s,经度误差稳定在1m左右,纬度误差稳定在2m以内。从理论仿真结果可以看出:SINS/GPS/Loran-C组合的联邦卡尔曼滤波器达到了提高导航系统的稳定性和精度的目的,此组合是可行的。
3 实验与分析
为进一步检验以上讨论的SINS/GPS/Loran-C组合系统的联邦卡尔曼滤波器性能,在此采用IMU、GPS、Loran-C的静、动态实测数据进行了实验。GPS和 Loran-C的信息输出间隔设置为5s,GPS采用WGS-84坐标系,Loran-C采用WGS-72坐标系,组合系统选取北东地的地理坐标系为导航坐标系。具体的实验结果如图5~图10所示。

进行静态数据采集点的位置坐标为北纬38°52.513′(即 38.8752°),东经 121°39.601′(即121.6600°)。采用GPS和Loran-C的位置信息为观测量,由图5~图7可以看出:组合系统的纬度误差稳定在30m以内,经度误差稳定在25m以内;北向和东向速度误差大致在5m/s以内。以上静态实测数据的实验可以表明:本文设计的SINS/GPS/Loran-C组合系统的联邦卡尔曼滤波器是稳定可靠的,达到了提高导航系统精度和可靠性的目的。
在经过静态实测数据试验的基础上,应用此联邦卡尔曼滤波器对在某海区采集到的动态实测数据(IMU 、GPS、Loran-C)进行试验,以进一步验证该滤波器的可行性。SINS/GPS/Loran-C组合系统的联邦卡尔曼滤波器输出的载体实时速度和实时位置曲线如图8~图10所示。
通过分析图8和图10可知:在2500s~7500s的时间段内,经度的变化量接近0.4°,换算成距离为24海里;而从东向速度曲线上看,东向速度的平均值在8m/s~9m/s的量级之间,按照这个速度估算可得,在5000s的时间内,东、西方向的距离变化在21.6海里~24.3海里左右,所以东向速度曲线和载体的经度曲线所反映出的舰船变化是一致的。
同理,通过分析图9和图10可知:在3750s~7500s的时间段内,纬度的变化量接近 0.125°,换算成距离为7.5海里;而从北向速度曲线上看,速度的平均值在3m/s~4m/s的量级之间,按照这个速度估算可得,在3750s的时间内南、北方向的距离变化在6.1~8.1海里左右,所以北向速度曲线和载体的纬度曲线所反映出的舰船变化是一致的。
通过以上动态实测数据的试验结果曲线和对试验结果的分析表明:组合系统的位置曲线所反映出舰船的位置变化与速度曲线所反映出舰船运动的趋势是一致的。
4 结语
本文针对SINS/GPS/Loran-C组合系统进行了联邦卡尔曼滤波器的设计与仿真,并以实测数据为基础进行了实验验证。仿真和实验验证所得出的结论是基本一致的:即本文所设计的SINS/GPS/Loran-C组合系统的联邦卡尔曼滤波器可以很好地提高导航系统的定位精度和可靠性,是可行的。
[1]衣晓,何友.多传感器组合导航系统评述[J].火力与指挥控制,2003,28(4):1~4
[2]秦永元,张洪钺,汪叔华.卡尔曼滤波与组合导航原理[M].西安:西北工业大学出版社,2004
[3]Carlson N.A.Federated Kalman filter simulation results[J].Navigation:Journal of the Institute of Navigation,1994,41(3):297~321
[4]黄晓瑞,崔平远,崔沽涛.多传感器信息融合技术及其在组合导航系统中的应用[J].高技术通讯,2002,(2):107~110
[5]林雪原.基于位置补偿的北斗双星多组合导航系统模式研究[D].南京:南京航空航天大学博士论文,2004,3
[6]Y.Bar-Shalom,T.E.Fortmann.T racking and data association[M].Academic press,1988
