某型舰炮随动系统误差产生的原因及超差的对策*
2010-04-26曾启洪
曾启洪
(92823部队四中队 三亚 572021)
1 引言
随动系统误差超差是系统控制中出现的一种故障现象,它影响系统控制的准确度及系统的稳定性,影响舰炮的日常使用和射击效果。了解随动系统误差超差的原因,对解决系统超差问题会有较大的帮助。随动系统误差超差是我们在修理中经常遇到的故障,它与系统控制的各元部件关系密切,要解决系统误差超差问题关系复杂。为了完成修理任务,快速排除故障,本文针对某型舰炮随动系统误差超差提出了解决的基本思路。
2 某型舰炮随动系统控制原理
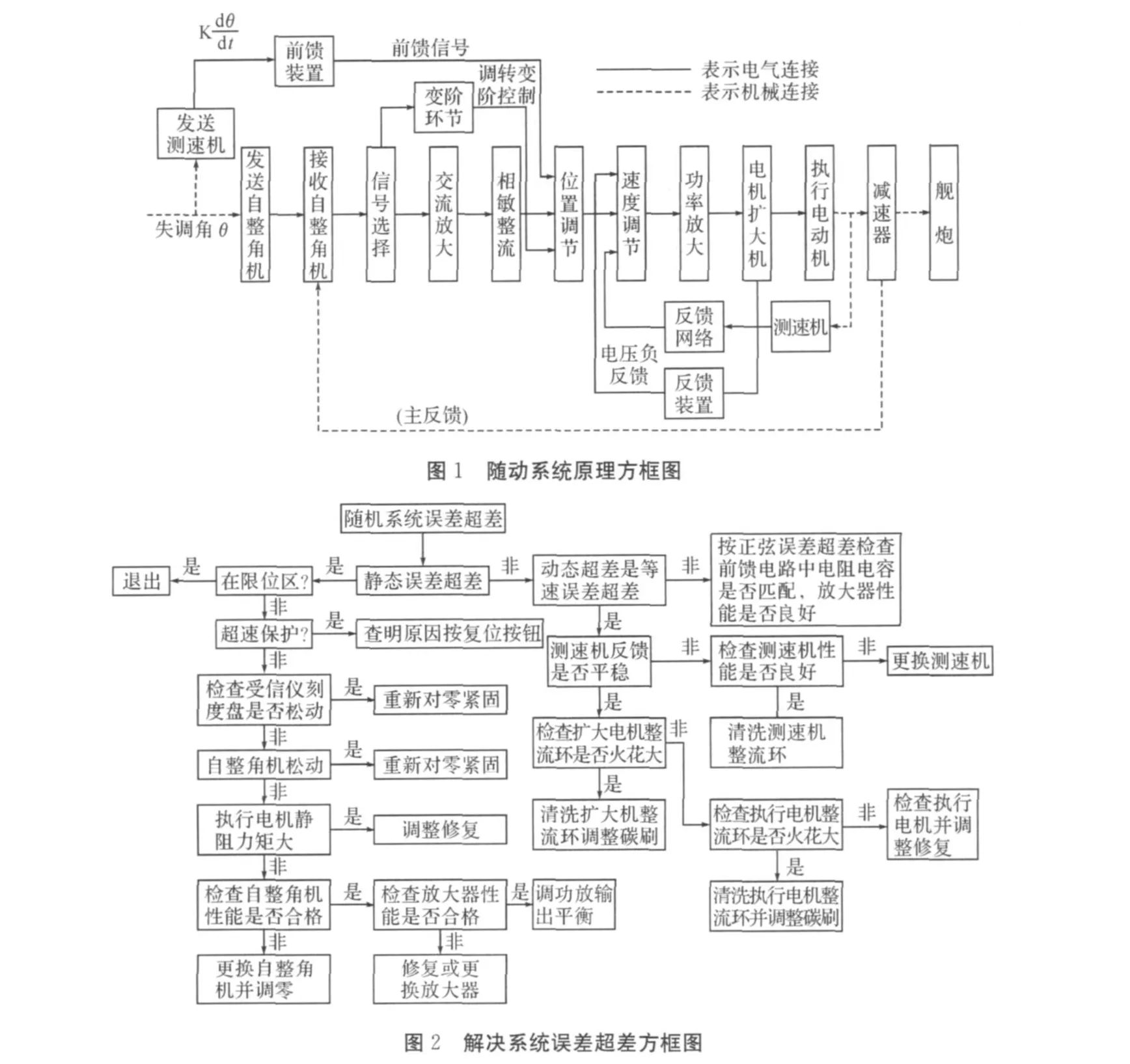
某型舰炮随动系统是二阶无差度的复合控制系统,系统原理方框图如图1所示。即当失调角大于100密位时为一阶无差度,在失调角较小时(≤100密位时)由于加入了调转变阶线路转换为二阶无差度,因此保证了大失调角时快速协调和小失调角时的精确度[4],其输入信号有主控信号(失调角)和前馈控制信号,反馈信号有执行电机转速负反馈和扩大电机的电压负反馈(电流截止负反馈),即从扩大电机补偿绕组端取出电流信号,以负反馈的形式加在电压调节器输入端限制主回路电流[2]。假设失调角为θ,指挥仪测速机转轴的转速为n1,执行电机的转速为n2,执行电机电枢电流为Id,自整角机、信号选择电路、交流放大、相敏整流均对主令信号进行放大,那么放大器输出信号电压U0可用以下公式来表示[1]:

其中K1~K6均为系数,可以看出输出信号电压U0与失调角θ,指挥仪自整角机转轴转速n1和执行电机转速n2,执行电机电枢电流Id有关,也就是说系统的控制精度与它们有关。
3 产生误差的原因
随动系统跟踪瞄准是由失调角来控制,是通过减小失调角达到协调的目的。因此没有误差的随动系统是不存在的,只不过误差要控制在适当的范围内[3]。根据系统运动的稳定状态,我们可把它分为静止、匀速、正弦及射击瞬间四种状态,下面就以舰炮在这四种状态运动时的误差进行讨论。
1)静态误差,是指舰炮从一个稳定状态到另一个稳定状态停止下来,最后所保留的误差角度;即发送信号的同步机转子绕组转过一个固定的角度后,舰炮在系统的带动下转到最后停止下来所保留的误差[1]。因此,静态误差与自整角机本身的固定误差,受信仪的零位误差,分划盘刻度与安装的误差,晶体管放大器的不平衡输出及执行电机的静阻力矩等因素有关。同时,如果同步发送机与接收机之间的三相绕组连接断开或绝缘不良,以及同步发送机损坏或激磁电压不正常,那么接收机也不可能正确指示发送机的状态。
2)等速误差,舰炮作等速运动跟踪目标,在稳定跟踪时所保留的误差角;即发送信号的同步机作等速运动,舰炮等速跟踪目标,达到稳定状态后所保留的误差角度[1],它与执行电机的转速成正比,转速愈高,等速误差愈大。同时等速误差与执行电机同轴相连的同步测速发电机的反馈信号有关,与扩大电机电压负反馈有关。
3)正弦误差,舰炮作正弦曲线运动跟踪目标,即发送信号的自整角机同步机转子以一定周期和振幅作正弦曲线运动,舰炮以相同的周期和振幅进行跟踪,达到稳定后所保留的误差角。因此,正弦跟踪误差与决定舰炮作正弦曲线运动的最大周期和振幅的元部件有关[5],具体地说,就是指决定运动周期的时间常数的电阻电容有关,与产生前馈信号的发送测速机的最大转速有关,与放大器的性能有关,它是检验系统是否合格的一个重要指标。
4)射击瞬时误差,指舰炮与指挥仪达到协调后,舰炮射击瞬间所保留的误差角度。即雷达完成目标跟踪后,传递跟踪信号给指挥仪,指挥仪解算出舰炮跟踪的不稳定瞄准全角,随动系统带动舰炮运转,在舰炮发射炮弹瞬间系统所保留的误差角度。因此射击瞬时误差与各分系统误差有关。
4 解决系统误差超差的方法
要解决系统出现的各种误差或使用过程中的系统超差问题,可以根据以上对各种误差产生的原因逐一进行研究找到解决的办法(解决系统误差超差的方框图如图2),下面就各种误差解决方法进行具体讨论。
1)静态超差解决方法。
(1)根据产生误差的原因可以得知,静态误差与自整角机本身的性能有关。因此,我们可以通过测量自整角机本身性能来判断。该受信仪自整角机型号为28ZKB02-S,粗机为1级,精机为0级,其技术参数如表1所示。
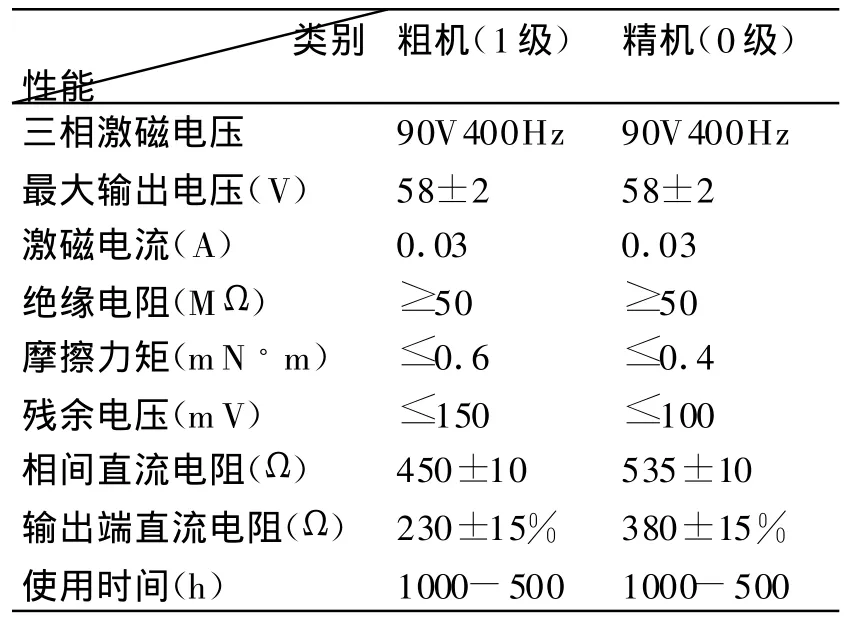
表1 受信仪自整角机技术参数表
根据表中参数,在断开自整角机的所有电连接情况下,用数字万用表测量自整角机的三相绕组之间电阻是否平衡和符合阻值,三相绕组之间阻值相差不能大于2Ω。如果不符合阻值或绕组阻值相差大于2Ω,则要更换自整角机;如果符合要求则检查输出端直流电阻值是否合乎要求,测量时要转动转子轴,阻值要平稳。再者,检查自整角机本身的绝缘性能是否良好。若以上检查不符合要求,也要更换自整角机;若符合要求则检查固定自整角机的螺丝是否紧固,刻度盘是否松动。如果固定自整角机的螺丝没有上紧,自整角机松动,则恢复电缆连接,要重新调整电气零位并固紧螺丝,再对正刻度盘零位。然后,检查同步发送机与接收机三相绕组的连接是否正常,绝缘是否良好;发送机是否良好,发送机激磁电压是否正常。
(2)在随动控制柜接通中频电源的状态下进行检查。给发送自整角机提供连续变化的失调角,检测受信仪转子输出是否在0~58V之间连续地平稳变化,如果达不到要求则要更换自整角机。当舰炮与传信仪(或指挥仪)协调时(即同步状态)测量受信仪自整角机的输出电压,粗机应不大于150mV,精机不大于100mV,且受信仪读数与传信仪(或指挥仪)相符。否则需要调整受信仪自整角机的位置,使其输出电压符合要求,并调整刻度盘读数与传信仪(或指挥仪)读数相同。如果调整自整角机达不到要求,那么要更换自整角机。
(3)对晶体管放大器要进行零位和输出平衡检查。检查放大器输出是否正负相等(相差不大于100mV),输出电压是否在规定范围内(约2~3V)。在失调角为零时,检测相敏、位置、速度、电压等放大各环节输出是否能调整为零(不大于5mV),如果某一环节不能调为零,则要检查该环节的运放性能是否良好,如果运放损坏则要更换;若运放正常,则检查运放的平衡电容、调零电位器等元件有无损坏或接触不良。如果各环节输出都能调为零,则检查晶体管放大器的功率放大管的工作电压是否正常,功率放大管有无损坏。如果功率放大管工作电压不正常,则对工作电压进行调整或修复;如果功率放大管损坏,则更换功率放大管。
(4)检查执行电机的静阻力矩。在舰炮与传信仪(或指挥仪)协调后,失调角为零,执行电机轴应不转动。用手拧执行电机轴应不能转动。测量静态误差通常在舰炮与传信仪(或指挥仪)协调后,用数字万用表测量受信仪自整角机转子输出,受信仪精机输出应不大于 1.8V,粗机输出不大于500mV,即误差不大于1密位,否则不合格,须对照以上检查,查出原因,排除故障。
2)动态误差解决方法。在静态误差已经合格的情况下才能进行动态误差检查。
(1)等速误差超差的解决方法:根据等速误差的原因分析,等速误差与扩大机电压负反馈及测速电机的负反馈有关;与执行电机的转速有关。因此,测速电机负反馈和扩大机的电压负反馈是否平稳对扩大机的输出会有影响;执行电机的转速是否平稳,对舰炮跟踪也会有影响。发现静态误差合格而等速误差不合格时,应当检查影响执行电机控制电压稳定和扩大机输出电压稳定的部位,具体地说就是检查执行电机和扩大电机转子的整流环是否清洁光亮及炭刷接触是否良好。如果整流环太脏或烧蚀严重,则应该用0#砂皮打磨至光亮,用酒精或汽油清洁干净,并调整碳刷松紧适度按原样装回;再者,检查扩大机电压负反馈线路是否正常,反馈是否合适。若线路绝缘或接触不良,则要进行修复;若反馈不合适则要调整电压反馈电位器。测速发电机的反馈检查也是一样,看测速机性能是否合格;反馈电压是否平稳、正确;测速电机转子整流环是否清洁光亮、碳刷接触是否良好,反馈线路绝缘和连接是否良好。同时,检查执行电机和测速机的激磁电压是否正常。如果激磁电压不正常,则要进行调整或修复。然后检查舰炮的最大调转速度是否超速,若超速则需调整为合格。等速误差的检测通常用指挥仪(或正弦机)作匀速运动跟踪目标解题带动随动系统运转来检查,可用示波器监视受信仪精、粗自整角机的转子输出电压变化来判断误差是否合格。检查等速误差时受信仪自整角机的精机输出电压应不大于3.6V,粗机输出应不大于1V,即误差不大于2个密位,否则不合格。应按上述检查,查明原因加以排除。
(2)正弦误差超差的解决方法:正弦跟踪误差的检查必须在等速误差合格的情况下进行。根据正弦跟踪误差的原因分析,正弦跟踪误差是随动系统带动舰炮作一定的周期和振幅运动跟踪目标所产生的误差。它与放大器响应输入信号的最大幅度和周期的变化性能有关。因此放大器接受信号的最大周期与幅度必须能与之相匹配,放大器的跟踪信号变化必须能响应输入失调角的变化。放大器接收前馈信号输入电路中的电阻电容应当匹配。可以通过调整放大器接收前馈信号输入电路中的电阻或电容参数来使系统得到全补偿,以提高系统的跟踪精度。如果调整前馈电路中的电阻电容不能使正弦误差合格,则要更换放大板或放大器。通常用示波器监视受信仪的粗、精自整角机的信号输出来检查正弦误差电压,精机最大输出不大于7.2V,粗机不大于1V为合格,即正弦误差不大于4个密位,否则不合格,应按上述检查,查出原因加以解决。
(3)发射瞬间误差超差的解决方法:在静态误差、等速误差、正弦误差均合格的条件下,我们通常用射击考核的方法来检查射击瞬时误差。射击瞬时误差的检测方法与等速误差、正弦误差的检测方法相同,射击瞬时误差最大不能超过10个密位。射击瞬时误差与雷达误差、指挥仪误差,舰炮随动系统误差有关。通常我们利用瞄星来校对雷达与舰炮之间的一致性,通过系统联调来校正雷达、指挥仪、舰炮之间的误差,使整个系统的误差最小。
[1]焦自平.1976年式双37毫米舰炮(电气部分)[M].北京:海军装备修理部出版发行,1990
[2]焦自平,惠宝聚,石军,等.H/PJ76A双37毫米舰炮(电气部分)[M].北京:海军装备部舰船技术保障部出版发行,1999
[3]马宏,王金波.误差理论与仪器精度[M].北京:兵器工业出版社,2007
[4]孙前来.模糊积分控制在位置随动系统中的应用[J].太原科技大学学报,2009,30(3):203~207
[5]韩有和,吴飞雪,赫赤,等.正弦机与方位系统特性匹配的探讨[J].火炮发射与控制学报,2001(1):11~14
