基于改进多目标遗传算法的非线性PID控制器参数设计
2010-04-13王志心雎刚
王志心,雎刚
(东南大学能源与环境学院,江苏南京210096)
由于PID控制器具有结构简单、鲁棒性强等优点,在工业控制中被广泛应用。据统计,目前工业控制器中约有90%仍是PID控制器。尽管如此,对于PID控制器,其静态与动态性能之间的矛盾,跟踪设定值与抑制扰动之间的矛盾,鲁棒性与控制性能之间的矛盾等,仍没能很好地解决[1]。而非线性PID控制却能真实地反映控制量与偏差信号之间的关系,在一定程度上克服了线性PID控制器的缺点,受到了越来越多的关注[2-4]。
与传统PID控制器一样,参数的选择同样决定了非线性PID控制性能的好坏。对于控制系统而言,控制器参数的整定应该要综合考虑稳定性、快速性、准确性三者之间的关系,统筹兼顾多个性能指标。所以PID控制器的参数整定应该是一个多目标优化问题[5]。
文章在分析NSGA-Ⅱ算法的基础上,针对其截断算子的不足之处,提出了一种改进的多目标遗传算法。相比原算法,改进算法得到的非支配解能够更均匀地分布在整个Pareto前沿面上。在此基础上,将其应用于锅炉过热汽温的非线性PID控制系统的参数整定中。文中以系统超调量、调节时间作为目标函数,使控制品质能够同时满足多个性能指标。仿真结果证实了该方法的有效性。
1 非线性PID控制器
非线性PID控制器可以表示为
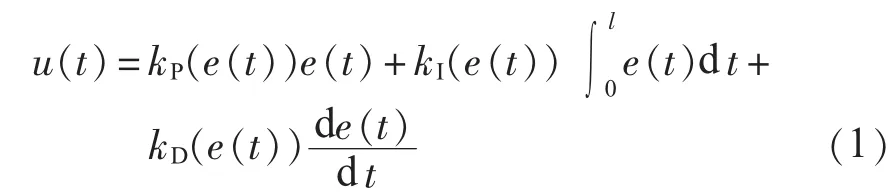
式中:kP(e(t)),kI(e(t)),kD(e(t))分别为比例、积分和微分系数,它们都是误差e(t)的非线性函数。
1.1 比例环节
比例环节的作用是加快响应速度,减小过渡过程时间。为保证系统能够快速地跟踪跟定值的变化,kP的大小应与误差的绝对值|e(t)|成正比。比例系数为

1.2 积分环节
积分环节的作用是增大系统阻尼,消除稳态误差。当e(t)大时,kI不应太大,以减小超调;当e(t)小时,kI不应太小,以消除稳态误差。其表达式为

1.3 微分环节
微分环节的作用是加快系统的动作速度,减小系统的稳态误差。从系统响应开始到峰值时间,kD的值应逐渐增大。其表达式为

式(2-4)中:kP1,kP2,kP3,kI1,kI2,kD1,…,kD4都为正实数,其值大小决定了系数kP(e(t)),kI(e(t)),kD(e(t))随误差e(t)的变化速率。
2 改进的多目标遗传算法
2.1 改进的截断算法
NSGA-Ⅱ算法[6]作为一种有效的方法已经在多目标优化领域得到广泛的应用。它采取3个主要策略:(1)一种计算时间复杂性大为降低的快速排序方法来评价解的非支配性;(2)μ+λ策略,即从父代与子代群体中选择最好的个体作为新的父代群体;(3)引入拥挤距离来度量处于同一非支配水平的解在目标空间的分布情况,并以此为依据来建立非支配解的偏序关系。
2.1.1 计算方法
设有2个子目标f1,f2,则个体i的拥挤距离为:

式中:P[i]distance为第i个个体的拥挤距离;P[i].m为个体i在子目标m上的函数值。
在原始NSGA-Ⅱ中,由于截断算子的不足,会导致得到非支配解不能均匀地分布在整个Pareto前沿面上。
2.1.2 算法流程
Stept1 根据式(1)计算处于同一非支配等级中个体的拥挤距离;
Stept2 将边界点赋予最大值以确保进入下一代;
Stept3 对个体按照拥挤距离进行排序,并将拥挤距离小的个体淘汰。
在原算法中,当一个拥挤距离较小的个体淘汰之后,会造成其相邻个体的拥挤距离发生变化,从而不能真实地反映个体之间真实的密度关系,如图1所示。

图1 待修剪的Pareto前沿面及采用原始算法的修剪结果
假设在截断算法运行时存在10个处于同一非支配等级的解,并且需要从中选择5个个体进入下一代。此时运用原算法的非支配排序方式对其进行排序,将其中的拥挤距离较小的个体删除。由图1可知,这将造成框中没有个体存在,使得解集的分布不均匀。为解决此问题,本文加入了一个动态的更新算子,每删除一个个体后,重新计算与其相邻的个体,从而使拥挤距离能够真实地反映出个体之间的密度关系,使其最终的解集如图2所示。
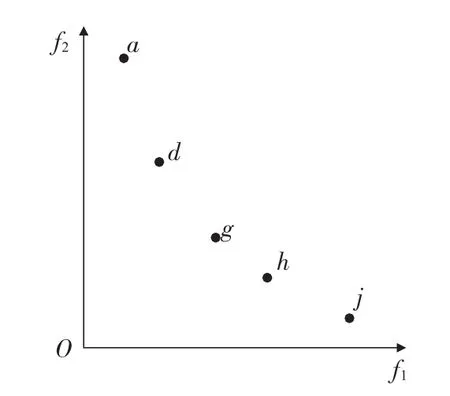
图2 基于改进截断算法的修剪结果
2.1.3 改进的基于拥挤距离的截断算法
Stept1 根据式(1)计算处于同一非支配等级中个体的拥挤距离;
Stept2 将边界点赋予最大值以确保进入下一代;
Stept3 将拥挤距离最小的个体从父代种群中删除,并更新与其相邻的2个个体的拥挤距离;
Stept4 重复步骤(3)直到子代种群满足预定大小。
2.2 数值实验
为了验证改进操作的有效性,文章选取文献中常用的多目标优化基准函数ZDT1与ZDT2[7]来进行性能测试。遗传算法的优化得到的Pareto前沿面如图3所示。
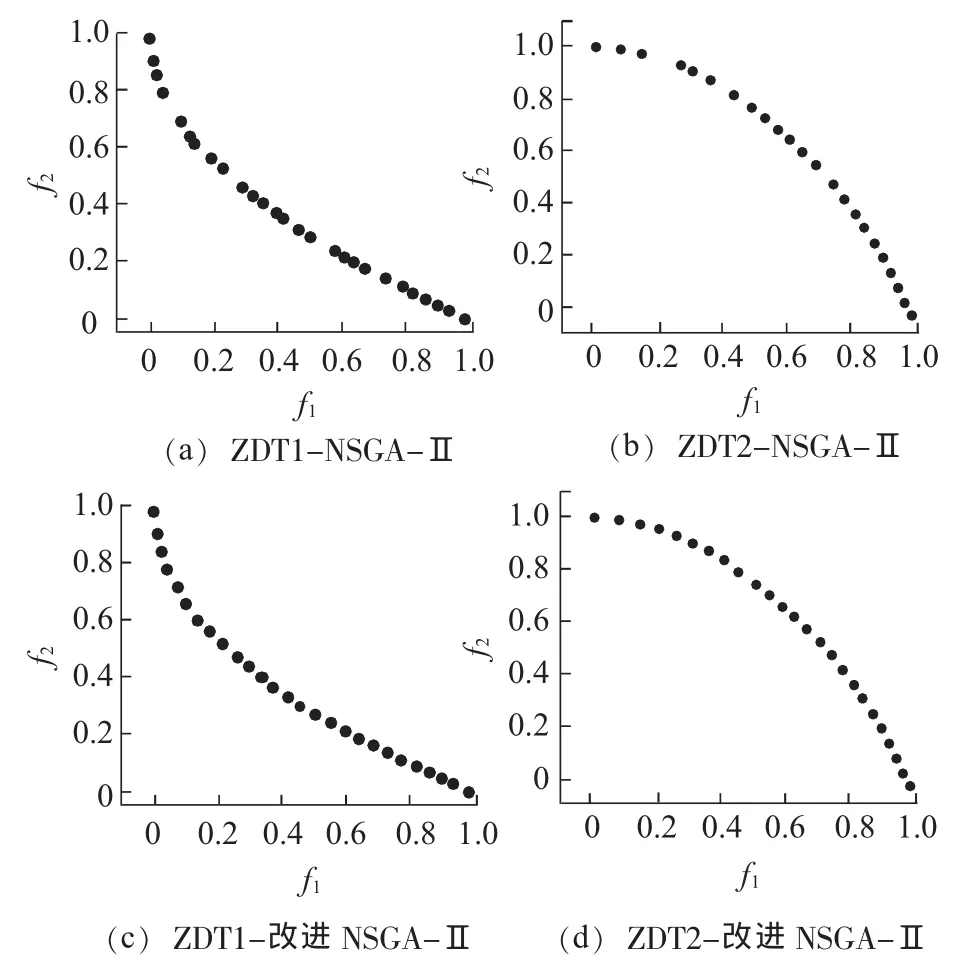
图3 2种算法在测试函数上的获得的Pareto前沿
从图3可以明显发现,相比原始的NSGA-Ⅱ算法,改进算法所找到的非支配解能够更均匀地分布在整个前沿面上。
3 仿真研究
3.1 仿真对象
锅炉过热汽温串级控制系统简化方框图如图4所示[8]。图中,r为过热汽温设定值;Wα1(s),Wα2(s)分别为汽温控制系统的副调节器和主调节器;Wσ1(s),Wσ2(s)分别为调节对象的导前区和惰性区的传递函数;WH1(s),WH2(s)分别为导前汽温和过热汽温的测量单元。各部分传递函数分别为
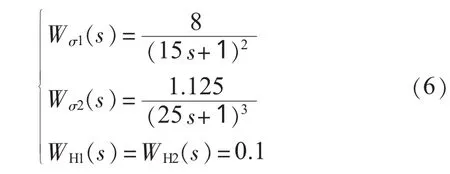
副回路要求响应速度快,起随动系统作用,故电厂过热汽温串级控制的副调节器常采用的是比例调节Wα1(s)=25;主回路要求过热汽温能够快速无偏差的跟随设定值,同时能够抑制外界扰动,因此本文采用第1节所述的非线性PID控制器。kP1,kP2,kP3,kI1,kI2,kD1,…,kD4则为遗传算法的待求参数。
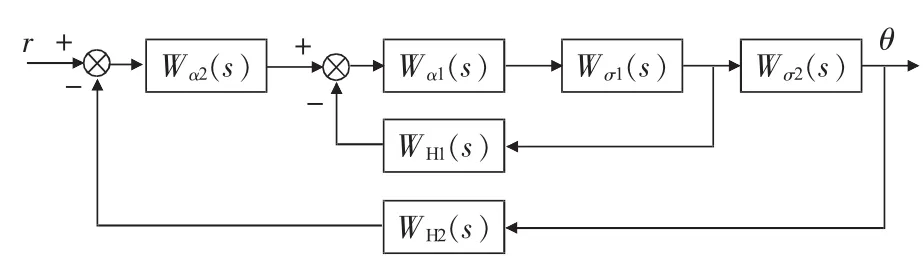
图4 锅炉过热汽温控制系统方框图
3.2 阶跃扰动实验
假设在设定值阶跃扰动下,对于系统输出的给定性能指标为
调节时间:ts≤140s
超调量:σ≤1%
这时采用第2节所述的改进多目标遗传算法针对这2个目标进行优化,遗传算法的参数设置为:种群大小30,进化代数500,交叉概率0.9,变异概率0.1。各参数的寻优范围为:kP1∈[0,1],kP2∈[0,1],kP3∈[0,10],kI1∈[0,0.1],kI2∈[0,5],kD1∈[0,15],kD2∈[0,9],kD3∈[0,15],kD4∈[0,9]。优化结果见图5。

图5 多目标优化的Pareto前沿
从图4中可以看出,满足给定要求的参数一共有19组。在实际应用中,可以根据具体的情况,从中选择最合适的一组参数,这取决于决策者的偏好。本文根据ISE指标的大小对这18组参数进行排序,选择了ISE指标最小的一组。其对应的性能指标及具体控制参数为

设定值阶跃扰动下,整定后的非线性系统的响应曲线,如图6所示。其中,实线为本文采用多目标优化得到的非线性PID控制器:虚线为基于ZN法整定传统的PID控制器。从图6中可知,相比于传统PID控制器250s左右的调节时间,非线性PID控制方法的调节速度快了很多,约为前者的一半,且超调量也非常小。

图6 阶跃响应作用下系统的输出曲线
过热汽温过程的惯性时间常数会受积灰等因素的影响而变大,或者由于某种原因使对象的增益变大。假定对象模型变化后为

控制系统其他环节不变,得到的阶跃扰动下汽温阶跃响应曲线如图7所示。

图7 对象模型发生变化的系统响应输出曲线
从图7可以看出,经过整定的非线性PID控制器,对象的惯性和增益同设计整定时所用模型不同的情况下,其整定结果仍能够快速跟踪设定值的变化,获得较好的控制效果,说明了该算法具有较强的鲁棒性,且过渡过程动态特性明显优于传统方法。
4 结束语
针对传统NSGA-Ⅱ算法的不足,提出了一种改进的多目标遗传算法,并将其应用于锅炉过热汽温的非线性PID控制系统设计中。遗传算法使非线性函数得到优化,使该非线性PID控制器不但比传统的固定参数PID控制器更好地保证了控制系统快速性和平稳性,并且能满足既定的控制性能指标。
[1] 王伟,张晶涛,柴天佑.PID参数先进整定方法综述[J].自动化学报,2000,26(3):347-355.
[2] 胡包钢.非线性PID控制器研究——比例分量的非线性方法[J].自动化学报,2006,32(2):219-227.
[3] 徐春梅,张浩,杨平.汽包水位串级三冲量非线性PID控制系统[J].华东电力,2009(5):238-241.
[4] 尚宏,陈志敏,任永平.一种新型非线性PID控制器及其参数设计[J].控制理论与应用,2009(4):439-442.
[5] 谢涛,陈火旺,康立山.多目标优化的演化算法[J].计算机学报,2003,26(8):997-1003.
[6] DEB K,AGRAWAL S,PRATAP A,et al.A Fast Elitist Nondominated Sorting Genetic Algorithm for Multi-objective Optmisation:NSGA-II[C].Springer-Verlag,2000.
[7] DEB K.Multi-objective Genetic Algorithms:Problem Difficulties and Construction of Test Problems[J].Evolutionary Computation,1999,7(3):205-230.
[8] 陈来九.热工过程自动调节原理[M].北京:水利水电出版社,1982.
