复杂设备的网络化远程监控及故障诊断系统
2010-04-05张书涛刘延斌贾晨辉仲志丹
张书涛,刘延斌,贾晨辉,仲志丹
(河南科技大学机电工程学院,河南洛阳 471003)
0 前言
大型复杂设备是由许多子系统构成的,这些子系统通常来自不同的厂商,其故障诊断也往往需要这些不同厂商联合技术支持。复杂设备往往是用户的关键设备,一旦出现故障而得不到及时解决将会给用户造成很大的经济损失,因此如何能够保障这些设备的正常运行,降低故障率,减少故障停机时间成为设备用户最关心的问题之一,故复杂设备的远程故障诊断技术已经成为研究的热点之一[1-3]。
传统故障检测与诊断方法主要有:(1)离线故障检测与诊断。这种方式经济方便,但效率低,一般只适用于定期检测。(2)单机在线故障检测与诊断,对每一个工作单元安装一套故障检测诊断系统。这种方式实时性好,可靠性高,但各检测与诊断子系统的信息不能共享。(3)集中式在线故障检测与诊断,其克服了单机方式的经济性差,信息难以共享等缺点,但这种方式受地域限制,难以进行远程的诊断[4]。对于疑难故障的诊断需要诊断专家通过专家会诊来诊断分析,这也要求远程故障诊断系统能够为远程专家会诊提供平台支持[2]。
近年来,远程诊断技术有了较大发展,在远程故障诊断中运用Web技术主要有 3种不同的模式:文献[5-6]采用的C/S模式,文献[7]采用的基于Agent的B/S模式,文献[4,8]采用的Multi-Agent模式。综合考虑,本文提出了一种C/S和B/S混合结构模式的复杂设备的分布式远程监控与故障诊断的实现方案。系统实时采集机床设备的运行状态信息,以及操作者的操作信息,通过网络实现分布式数据管理和远程多级故障诊断,同时为设备用户的网络化制造提供支持。设备制造商和设备使用企业的设备管理部门可以通过网络远程监控设备的运行状况,一旦设备出现故障,系统将启动分级自动故障诊断机制。对于疑难故障,技术工程师也可以利用系统平台进行远程人工协同故障诊断,使设备及时得到维修以缩短故障停机时间。
1 系统的组成结构
网络化分布式远程监控与故障诊断系统是通过网络实现设备的分布式控制、资源共享、动态扩展、远程调度、专家诊断、人工专家协同故障诊断等多项功能。系统的结构见图1,系统从层次结构上分为 3个层次,主要有采集终端、本地监控中心、本地监控终端、故障诊断中心、远程监控终端等部分组成。
1.1 采集终端
采集终端是安放在设备工作现场的嵌入式系统,其主要功能有:(1)数据采集功能。实时采集设备的运行状态信息,包括:系统工作电压、电流、功率、工作轴的速度、油压、温度、振动等。(2)通讯功能。包括两个方面:第一,与企业监控中心之间的网络通讯,负责将现场采集的数据通过企业局域网上传至本地监控中心,并接收处理本地监控中心的命令和数据。第二,与设备控制系统之间的串行通讯负责采集控制系统的状态信息,操作者的操作信息,和向控制系统传递加工程序或加工参数。(3)初级故障诊断和预警功能。对采集到的设备运行状态信息进行分析处理,并利用自身的诊断程序对设备的运行情况做出判断,及时提供预警信号和维护保养建议,并在设备发生故障时进行初级故障诊断。
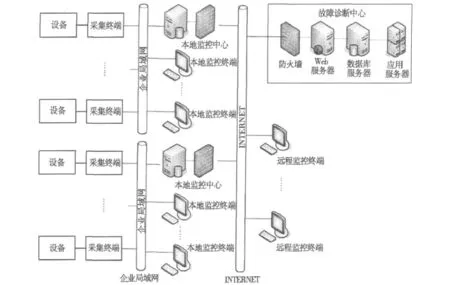
图1 系统的结构图
1.2 本地监控中心
本地监控中心设在设备使用单位,是由一台或多台计算机和网络设备组成,主要提供两方面的服务:(1)通讯。管理与故障诊断中心、本地客户端和本地监控终端的网络通讯。(2)数据管理。存储和管理本地数据,包括监控终端上传的实时数据及历史数据,本地设备维修、保养记录,历史加工程序和加工参数等。
1.3 故障诊断中心
故障诊断中心设在设备制造商的技术服务中心或相关的科研院所,是由多台计算机和网络设备组成的一个中心平台,主要提供四方面的服务:(1)通讯。管理与远程监控终端以及与各个企业监控中心的通讯。(2)数据管理。包括服务设备的参数和技术指标列表,企业监控中心上传的故障设备的原始信息和故障诊断历史信息,用于故障诊断的知识库和诊断实例库。(3)故障诊断专家系统。当设备出现故障时,对设备的工作信息进行计算分析、仿真模拟和自动故障诊断。(4)疑难故障分布式多专家人工协同诊断平台。当通过专家系统仍无法排除故障时,为异地多专家协同故障诊断提供支持平台。
1.4 本地监控终端
本地监控终端是通过企业局域网连接本地监控中心的计算机,根据权限设置,可以实现以下功能: (1)配置本地监控终端的工作参数。(2)查看本地设备的当前运行状态、历史信息。(3)通过本地监控中心和本地采集终端向设备传送加工程序和加工参数。(4)向本地监控中心登记本地设备的维修保养记录。(5)通过本地监控中心向诊断中心发送故障诊断申请,并参与人工协同故障诊断。
1.5 远程监控终端
远程监控终端是通过Internet连接到故障诊断中心的计算机。它们借助于诊断中心的软件支持,根据监控中心分配的权限,可以查询设备历史工作信息和当前运行状态,调用故障诊断中心的软件模块进行分析计算和仿真,进行人工协同故障诊断。
2 系统的工作原理
采集终端与本地监控中心之间的连接采用C/S结构,采集终端将采集的原始信息通过基于TCP/IP的点对点连接上传至本地监控中心,由本地服务器统一管理。企业监控中心与故障诊断中心之间的通讯也是采用基于TCP/IP的点到点连接的C/S结构。
本地监控终端与企业监控中心之间、远程监控终端与故障诊断中心之间采用B/S结构(Browser/ Server,浏览器/服务器模式),监控客户端不用安装任何专门的软件,只要安装一个浏览器(Browser),浏览器通过Web Server与本地服务器或诊断中心进行数据交互。这种模式统一了客户端,将系统功能实现的核心部分集中到服务器上,简化了系统的开发、维护和使用。
故障诊断流程如图2所示,当设备出现故障时由采集终端根据采集到的各种信息调用初级诊断程序进行原因查表,如果不能排除故障,则向本地监控中心传输故障信息,由本地客户端根据本地服务器中存储的设备信息进行本地人工故障诊断,若不能排除故障则通过诊断服务器向远程故障诊断中心申请故障诊断,诊断中心专家系统向本地监控中心调用初级诊断信息和设备历史运行状态信息,根据知识库、规则库和诊断实例库进行综合分析得出设备的运行状态、可能故障原因及排除方法,并将诊断结果传回设备用户的本地监控中心,若仍不能排除故障则进入人工协同故障诊断,由设备不同子系统的人类专家通过远程客户端向诊断中心服务器调用所需的设备运行信息,进行人工协同故障诊断,并将结果返回给本地服务器,故障排除后更新诊断中心知识库可诊断实例库。
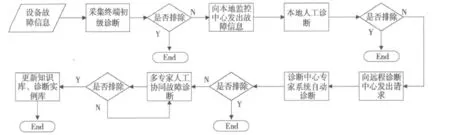
图2 故障诊断流程
可见,系统具有以下特点:(1)灵活性。由于系统采用三层体系结构的模块化设计和C/S和B/S混合结构模式,无论是采集终端的增加还是本地监控服务器的增加都很容易,易于系统扩展。(2)分布性。设备运行数据在本地,故障诊断中心在远程,两部分相对独立,监控终端通过网络连接本地监控中心或远程故障诊断中心,实现分布式的远程监控和故障诊断。(3)安全性。不同企业都有自己的监控中心和自己的数据库,使得网络的安全性得到保证。(4)高效性。故障预警和多级故障诊断机制使系统有很高的故障诊断效率。(5)经济性。将嵌入式技术和网络技术相结合,采用 C/S和B/S混合结构模式,使得系统易于扩展,投入较少。
3 故障诊断中心系统构架
故障诊断中心最少需要三类主机以完成各类服务的支持,包括Web服务器、数据库服务器和应用服务器[8]。由于设备需要接入Internet,为了保证系统安全,需要加入硬件防火墙。
Web服务器接入Internet,负责管理与各个本地监控中心的数据传输。数据库服务器存储设备详细清单、本地监控中心上传的设备故障信息、专家系统知识库和诊断实例库。应用服务器负责运行故障诊断专家系统和人工协同故障诊断平台。
由于硬件的任何一个环节都可能出现故障,为了保证系统的可靠运行,需要对关键硬件设备和资源进行冗余,包括:所有的服务器做双份冗余、Internet接入需要冗余、防火墙和交换机都需要做冗余。另外提供UPS不间断电源。
4 采集终端的实现
采集终端是系统的关键组成部分之一,担负着原始数据的采集与分析,故障预警与初级故障诊断等任务。由于工作环境较为恶劣,要求系统既要完成相应的功能又要有较高的可靠性,本文采用嵌入式系统的解决方案。由于设备的复杂性,所要采集的信号多种多样,为此监控终端设计了 8路开关量输入接口、8路12位AD转换接口、2个RS232接口以及1个RS485接口,以适应不同信号的采集,同时还设计了 8路开关量输出接口,用于对设备附加的检测装置的控制。其硬件结构如图3所示。
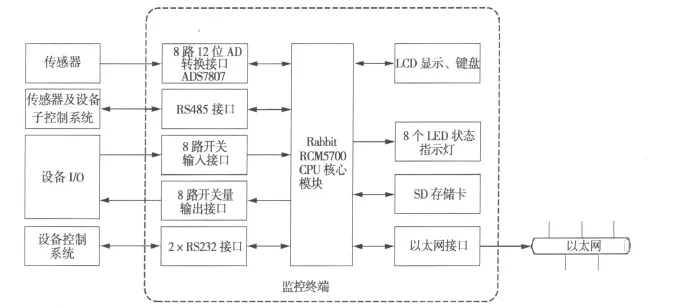
图3 监控终端的硬件结构图
CPU核心模块采用Rabbit Semiconductor公司的RCM5700模块,该模块是Rabbit产品中体积最紧凑和成本最低的嵌入式微控制器核心模块,采用Rabbit 5000微处理器,工作主频达50 MHz,1M flash memory(最大支持16 M),两个时钟(主晶振和时间晶振)和为Rabbit 5000内置实时时钟/片内SRAM提供后备电池所需的重启/管理电路。Rabbit5000还提供了带标准MII PHY接口的完整10/100Base-T以太网MAC,在RCMP5700模块上采用了ISC1893作为以太网物理层接口(PHY),实现了高速以太网接入[9-10]。
采集终端的串行口主要用于连接设备的控制系统和基于串口的传感器。同时,在单个监控终端的采集端口不够的情况下还可以通过串口扩展数据采集单元。
采集终端的软件采用Dynamic C语言编写,在Rabbit的Dynamic C 10.50开发环境下完成,从功能上大致可以分为:初始化模块、系统参数设置模块、数据采集模块、网络通讯模块、服务器数据解析模块、初级故障诊断模块、人机接口模块7个部分,利用Dynamic C的协作多任务调度机制实现各个功能模块的并行执行。其结构如图4所示。主要模块功能如下。
数据采集模块从各类传感器和设备控制系统采集设备工作状态的原始信息,并对这些信息进行处理和本地保存。
网络通信模块负责与本地服务器通过 TCP/IP协议建立点对点连接,将数据采集模块采集到的数据按照协议规定的格式上传至本地监控中心服务器,并接收保存服务器发来的数据。
服务器数据解析模块负责对本地监控中心服务器发送来的数据进行解析。服务器数据有这样几类:工作参数设置数据、用于故障预警和初级故障诊断的故障原因代码列表数据和加工程序。服务器数据解析模块根据数据的含义调用不同的程序模块进行处理,并通知网络通讯模块对服务器应答。
参数设置模块将从人机接口或服务器解析模块获得的参数设置数据、故障原因代码列表数据按格式保存到Flash中并使之生效。
初级故障诊断模块对设备的工作状态的原始信息进行分析,根据系统的工作参数和故障原因代码列表对设备的运行状态进行评价,提供预警信息和初级故障诊断信息。
5 测试结果
试验中对一台大型筒体专用数控车床的运行状态进行远程监控,监控信息有:液压系统油压,主电机风机的启动状态,Z轴的位置及速度,主轴的转速。采集终端能够按照设定的时间间隔上传监控信息,实时性较好。忽略现场传感器的测量精度,上传参数和实际运行参数一致。人为模拟液压系统失压和主电机风机堵转两种故障,现场采集终端能够及时预警,并完成了初级故障诊断。测试结果满足设计要求。
6 结束语
本文提出的复杂设备的网络化远程监控及故障诊断系统将分散的复杂设备通过网络来进行远程管理和故障诊断,具有灵活性、高效性等优点。测试结果表明:系统工作稳定可靠。系统的推广应用不仅能使复杂的设备用户得到及时有效的技术服务与技术支持,也能使设备的生产厂家降低技术服务的成本,提高服务的档次与水平。
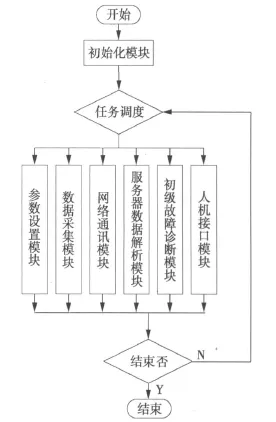
图4 采集终端软件结构
[1] 杨叔子,吴波,胡春华,等.网络化制造与企业集成[J].中国机械工程,2000,11(2):45-49.
[2] 张金玉,张优云,谢友柏.机械故障诊断支持系统的构架研究[J].中国机械工程,2003,14(5):420-423.
[3] 刘刚,李涛,曹哲.基于串口和局域网通讯的实时生产监控系统[J].河南科技大学学报:自然科学版,2006,27(4): 36-39.
[4] 李鹏南,尹喜云,黄振宇.基于Web的CNC机床远程故障诊断系统[J].机床与液压,2007,35(3):193-195.
[5] 陈希,楼佩煌.基于Internet的远程FMS故障诊断系统研究[J].南京航空航天大学学报,2000(6):57-61.
[6] 陈忠,郑时雄.基于web的远程监控与故障诊断实现策略[J].华南理工大学学报,2002(6):31-32.
[7] 黎洪生,陶运锋.远程在线检测与故障诊断系统的设计和实现[J].武汉理工大学学报,2001(7):35-37.
[8] Ong SK,An N,Nee A Y C.Web-Based Fault Diagnostic and Learning System[J].Advanced Manufacturing Technology, 2001,18:502-511.
[9] 陈一鸣,陈进,伍星,等.基于网络的远程监测和故障诊断系统的数据库系统[J].振动与冲击,2005,24(6):61-64.
[10] Rabbit Sem iconductor Inc.Rabbit 5000Microprocessor User,s Manual[EB/OL].www.rabbit.com.Part Number:019-0168080615-A.
[10] Rabbit Sem iconductor Inc.MiniCore RCM5700 User,s Manual[EB/OL].www.rabbit.com.Part Number:019-0173080826-A.
