绞吸式挖泥船剖面工作轨迹计算*
2010-04-03吴景培
郭 辉 吴景培
绞吸式挖泥船剖面工作轨迹计算*
郭 辉 吴景培
(七〇八研究所 上海 200011)
绞吸式;挖泥船;剖面工作轨迹;算法
通过对绞吸式挖泥船进行几何建模,推导出绞吸式挖泥船疏浚宽度、疏浚深度工作轨迹公式,为开发自主知识产权的智能化挖泥操作设备建立数学基础。
0 引 言
自1884年第一条绞吸式挖泥船在美国诞生以来,绞吸式挖泥船经过一百多年的发展,已经成为挖泥船王国中所占比例最大的船型。绞吸式挖泥船将泥土挖掘、吸入、排放等疏浚工序一次完成,具有连续作业等优点,被广泛应用于港口、航道的疏浚和陆地吹填工程[1]。
以荷兰IHC和德国Krupp等为代表的国外疏浚产品设计公司,自80年代中期以来,采用微型计算机技术,开发相应的疏浚设备控制系统,并取得了显著的效果。在90年代初,荷兰、德国、美国和日本等发达国家,开发出了疏浚轨迹显示系统、动态定位跟踪系统、生产过程综合监控系统、泥泵控制系统和综合控制操纵椅等设备。目前,国外大中型绞吸式挖泥船普遍装有计算机控制的自动控制系统[2]。
我国在这方面进行的开发研究工作起步相对较晚,80年代末90年代初,才陆续有国内科研单位投入研究。多家单位已经对绞吸式挖泥船的自动化系统如施工监测技术、自动定位定深分布式控制系统等方面开展研究工作,并且取得了一定的成果[3]。七〇八研究所、上海航道局、天津航道局、上海交大东伟公司等多家单位相继研究开发了疏浚剖面监视系统、产量监视系统、动态定位跟踪系统、吃水装载监视系统等装备[4,5,6,7]。智能化疏浚系统在国外疏浚船舶上已有初步应用,而我国绞吸式挖泥船智能系统的研制和应用比较落后。[3]
本文以绞吸式挖泥船为研究对象,研究操作机理与工作轨迹,为开发自主知识产权的智能化疏浚操作设备建立基础。
1 绞吸式挖泥船工作机理
绞吸式挖泥船主要由绞刀系统、泥泵系统、动力系统、定位系统、吸排泥系统(包括水上浮筒排泥管、潜管和陆上输泥管)等组成。施工时通过安装在绞刀架前端的绞刀运动实现破土,转动的绞刀将海(河)底泥(沙、石等)连续不断地绞松,并进行泥水混合。混合后的泥水在大气压的作用下,经吸口吸入,泥泵加压后,通过排泥管输送到吹填区或指定的卸泥区[8]。
操作人员通过对钢桩行车、横移绞车、绞刀架绞车的操纵,控制船舶前后移动、船舶的左右横移和绞刀的上升与下降,完成疏浚工作。

图1 疏浚工作剖面图

图2 疏浚工作侧视图
本文主要研究绞刀头剖面工作轨迹,即绞刀架转动角度与疏浚深度之间关系,以及船体以定位桩为轴转动角度与疏浚宽度之间的关系。
2 绞刀架转动角度与疏浚深度之间关系
在船体上同一甲板平面安装四个液面测深装置,使四个装置分别处于矩形的四个顶点位置。为研究方便将船体抽象为长方体,建立模型,如图3、图4、图5所示:
图4中符号含义见表1、表2。

图3 疏浚航迹图

图4 船体模型立体图

图5 船体模型侧视图

表1 疏浚深度几何模型含义

表2 疏浚深度模型数值含义
在图4所示XYZ坐标系中,点A、B、C、D、J的坐标:
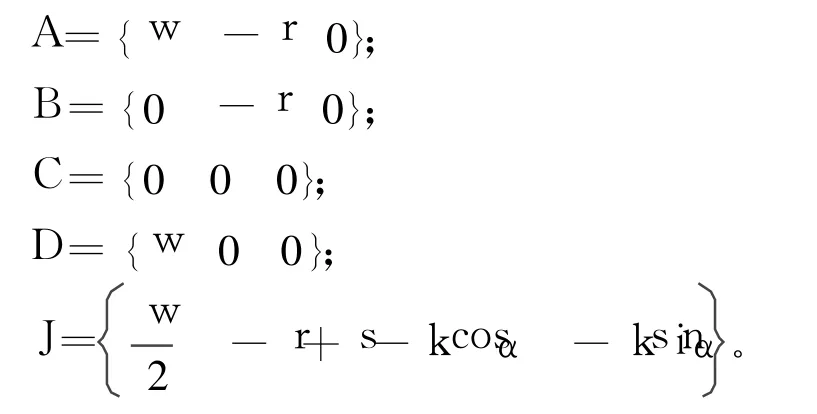
根据点到面公式可求得面EFGH方程:

点J到面EFGH距离,即绞刀头顶点距水面距离为:
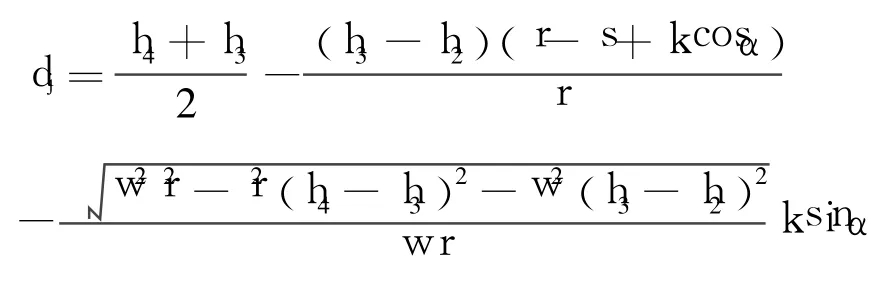
从而可得以下公式:
公式1:绞刀架转动角度与疏浚深度关系公式

公式2:绞刀架转动角度与疏浚深度关系公式

其中:

根据公式1,根据绞刀架转动角度,可以知道绞刀头所处的深度;根据公式2,可以依据要求的疏浚深度,设置绞刀架转动角度。
3 船体以定位桩为轴转动与疏浚宽度之间关系
为了维持挖槽两侧的稳定,挖槽横剖面通常为倒梯形。
图6、图7中符号含义见表3:

图6 疏浚宽度剖面图
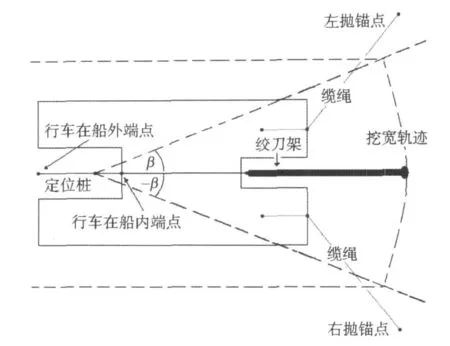
图7 疏浚宽度俯视图

表3 疏浚宽度模型数值含义
船体以定位桩为轴的转动角度与疏浚宽度之间关系如下:
公式3:船体以定位桩为轴的转动角度与疏浚宽度之间关系公式。

从公式3可知,当左右两侧抛锚点不变、定位桩在行车船外端点时,船体可以转动的角度最小;当α=0时,绞刀头可以行走的距离最长;当α=R1时,绞刀头可以行走的距离最短;当疏浚深度、疏浚宽度确定时,船体单侧最小转动角度应为:

4 结 语
对绞吸式挖泥船疏浚工作剖面轨迹算法的研究,不仅为下一步智能疏浚控制系统的研究建立了基础,也为挖泥船整机可靠运行获得最佳疏浚工况参数提供了重要保证。
[1] 丁水星.绞吸式挖泥船的疏浚设备[C].中国水力发电工程学会机械疏浚专业委员会第十八次疏浚与吹填技术经验交流会,2005.
[2] Mallee G.T.etc.A New Innovative Dredge Track Presentation System[C].16th world dredging conference,2001.
[3] 张迅国.国内外挖泥船-现状与趋势[J].国际船艇,2002(2):20~24.
[4] 林风,史美祥,金华.绞吸挖泥船工况监测系统[J].水运工程,2000(12):78~82.
[5] 何祖军,俞孟蕻.绞吸挖泥船剖面显示系统[J].华东船舶工业学院学报,1999(6):24~27.
[6] 胡翼元,强耀明.利用计算机设算绞吸式挖泥船施工工况[J].水运工程,1994(1).
[7] 田俊峰等.绞吸挖泥船计算机辅助疏浚决策系统[J].水运工程,2005(3).
[8] 史中权.基于PLC现场网络的绞吸式挖泥船监控系统[J].南京:河海大学,2002.
[9] 李振旺,朱明磊.GPS定位系统在绞吸式挖泥船中的应用[J].世界桥梁,2003(4).
Calculation of Working Path for the Sections of Cutter Suction Dredger
Guo Hui Wu Jingpei
cutter suction;dredger;working path for the sections;algorithm
By virtue of ageo metrical model of the cutter suction dredger,the working path equations for the working depth and width of cutter suction dredger are putted forward in this paper,constituting the mathematical fundament for developing intelligent dredging equipments with independent intellectual property.
U674.31
A
1001-9855(2010)03-0041-04
2009-11-06
郭 辉(1981.08-)男,汉族,江苏人,助理工程师,主要从事船舶监控系统设计工作。
吴景培(1945.07-)男,汉族,上海人,高级工程师,主要从事船舶电气设计工作。
