基于水平集改进的水下目标轮廓提取方法
2010-03-24王兴梅印桂生门志国叶秀芬
王兴梅,印桂生,门志国,叶秀芬
(1.哈尔滨工程大学计算机科学与技术学院,哈尔滨150001,wangxingmei@hrbeu.edu.cn; 2.哈尔滨工程大学自动化学院,哈尔滨150001)
水下目标的正确分类识别是建立在有效的特征提取基础之上的,提取目标高亮区和阴影区的轮廓可以用到特征提取的过程中[1].基于水平集的轮廓提取方法充分考虑了拓扑性和各相之间的相互独立性,能对不规则形状(有空洞和重叠)的水下目标进行精确的轮廓提取[2-3].
本文在综合分析现有文献算法的基础上,结合声纳图像的特点,提出了一种基于水平集改进的水下目标轮廓提取方法.在轮廓提取的过程中,针对利用水平集方法对整幅声纳图像处理,可能会将背景噪声当成目标高亮区或阴影区进行了轮廓提取,同时,还存在运算时间过长的问题,提出利用水下目标检测结果[4]在原始图像上确定目标演化子区域,缩小目标区域范围;为避免初始闭合曲线选取不当,可能不能同时提取目标高亮区和阴影区的轮廓,提出在目标检测结果中,根据目标高亮区和阴影区的位置,确定各个目标演化子区域初始闭合曲线的中心坐标,最后通过Vese-Chan分段常量四相水平集方法的演化函数进行目标高亮区和阴影区的轮廓提取.
1 水下目标轮廓提取
1.1 Vese-Chan分段常量四相水平集方法
Vese-Chan分段常量四相水平集方法的能量泛函为[5-6]

其中,c为一个常数向量,且 c=(c11,c10,c01,c00),φ=(φ1,φ2),Ω为整个声纳图像区域.
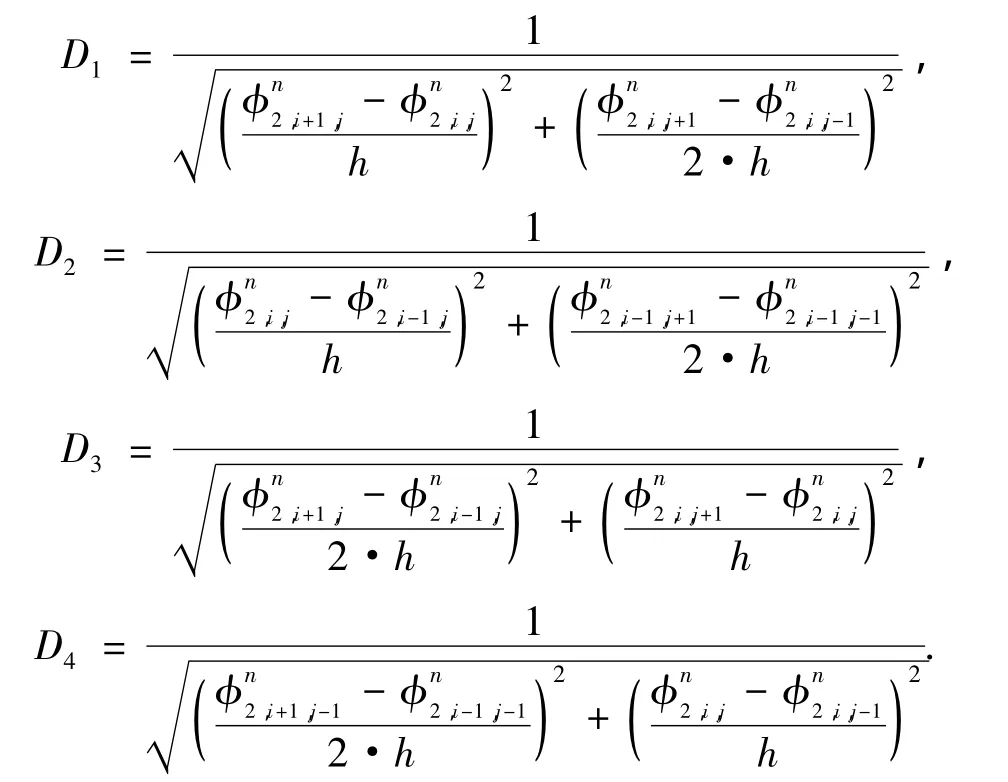
1.2 Vese-Chan分段常量四相水平集方法的数值算法
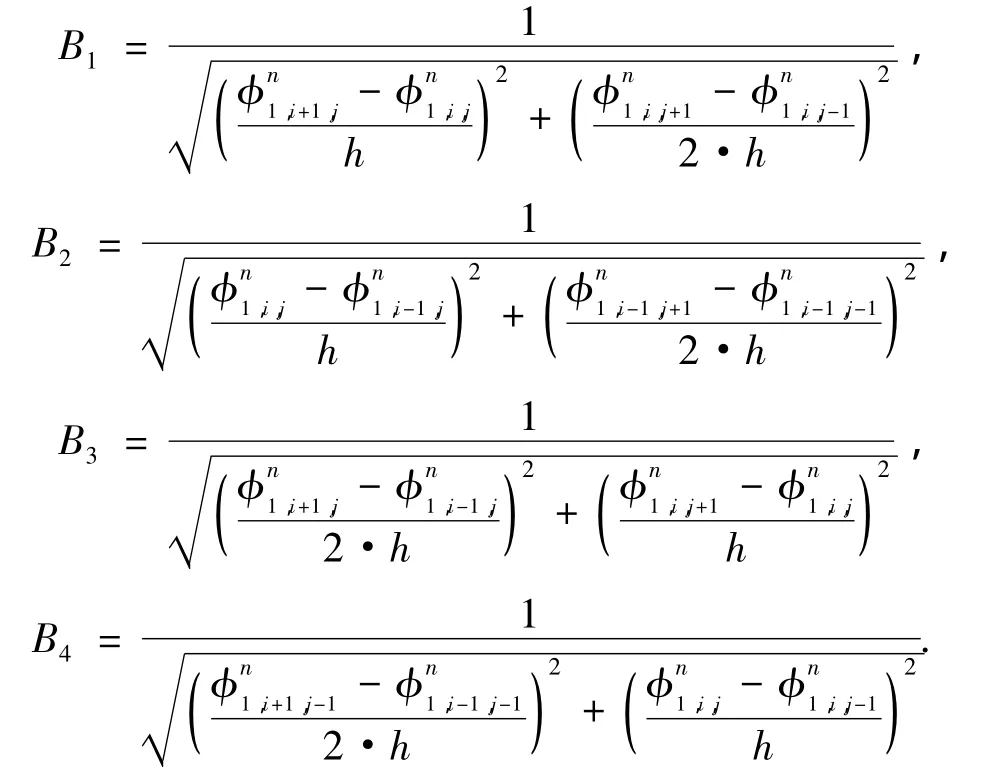
同理,对第2个水平集函数φn+12,i,j,设

1.3 轮廓提取算法的描述
提出的基于水平集改进的水下目标轮廓提取方法的具体说明如下:
1)设定初始值n=0,为了提高轮廓提取的精度和计算速度,利用水下目标检测的结果[4]来确定目标演化子区域,并对各个目标演化子区域进行维纳滤波;
随着医院科研管理的快速发展和环境的不断转变,科研经费审计已越来越受到人们的重视。被赋予了组织内部控制检查、为风险管理与治理活动增加价值和改善运营情况的重任。渐渐成为辅助政策落地、规范单位运行、实现国家良治的机制保障;实施财务监督、有效落实责任、规避项目风险、优化资源配置的必要措施;顺应社会舆情、消除破窗效应、宣传贯彻国家政策、营造风清气正的关键节点;搭建服务平台、提供审计咨询、深化科技发展的有效途径。
目标演化子区域的确定是在水下目标检测结果中[4],根据各个连续区域横纵方向上的顶点坐标[8],得出F个互不重叠的窗口.然后分别映射到原始声纳图像的相应位置,最终得到F个互不重叠的目标演化子区域.
2)在各个目标演化子区域内,根据初始闭合曲线,确定基于Vese-Chan分段常量四相水平集方法的初始水平集函数φ1(0,x,y)=φ1,0(x,y)和φ2(0,x,y)=φ2,0(x,y);
经过大量的实验发现,声纳图像初始闭合曲线位置不同,轮廓提取结果将不同.只有当初始闭合曲线分别取在目标高亮区和阴影区上时,最终才能提取到目标高亮区和阴影区的轮廓,取其他任何一种位置形式都可能不能同时得到最终目标高亮区和阴影区的轮廓,针对这个问题,提出一种初始闭合曲线的确定方法.具体方法为
①在水下目标检测结果所得出的F个互不重叠的窗口中,根据各个窗口中连续区域横纵方向上的顶点坐标,确定连续区域的中心坐标;
②保持中心坐标的横坐标不变,纵坐标分别向左、右移动g个单位(g根据各个窗口连续区域宽度的一半作适当调整).即得到了各个目标演化子区域的初始闭合曲线圆心坐标.
③初始闭合曲线的半径r根据各个窗口中连续区域宽度的一半作适当选择.
3)更新Vese-Chan分段常量四相水平集方法的演化函数[9-10];
对于每个n>0,利用Vese-Chan分段常量四相水平集方法在各个目标演化子区域内计算和水平集演化函数和
4)若迭代达到稳定状态,则停止迭代;否则转到步骤3)继续迭代直到稳定.
2 实验结果分析
根据水下目标检测的结果[4]给出了本文提出的轮廓提取方法的实验结果及分析.针对目标形状有空洞的原始声纳图像进行的轮廓提取见图1.
为了比较,给出了维纳滤波后声纳图像的初始闭合曲线和轮廓提取结果见图1(e)和(f).
由于把整幅图像变成了只包含各个目标的演化子区域,提高了轮廓提取的精度和计算速度,同时,由于初始闭合曲线取在了目标高亮区和阴影区上,能同时准确地提取到目标高亮区和阴影区的轮廓.

图1 目标形状有空洞的原始声纳图像轮廓提取结果
第2组实验是针对目标形状有空洞和重叠的 原始声纳图像进行的轮廓提取,如图2所示.

图2 目标形状有空洞和重叠的原始声纳图像轮廓提取结果
表1给出了各组实验在主频为2.40 GHz、内存为2 GB的计算机上,利用Matlab7.0软件运行程序,所得轮廓提取结果运算时间的比较.
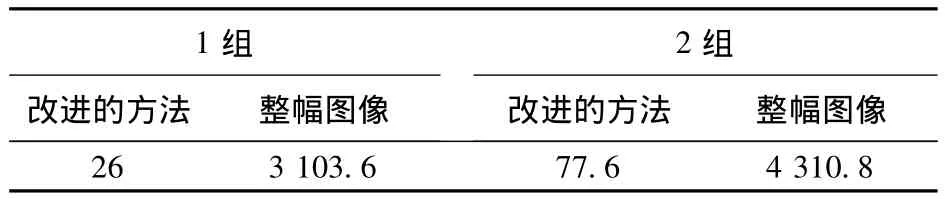
表1 运算时间比较s
通过对不同的原始声纳图像轮廓提取结果的比较可以看出,Vese-Chan分段常量四相水平集方法的轮廓提取虽然可以对不规则形状的水下目标进行精确的轮廓提取,但是轮廓提取结果含有较多的非目标噪声点轮廓,并且初始闭合曲线位置的选取没有规律性,需要根据真实声纳图像人为给值;本文所提出的轮廓提取方法提高了轮廓提取的精度和计算速度,同时能准确地提取到目标高亮区和阴影区的轮廓,有利于更高层次的声纳图像分析和识别.
3 结论
1)提出利用水下目标检测结果确定目标演化子区域,缩小目标区域范围.
2)提出在目标检测结果中,根据目标高亮区和阴影区的位置,确定各个目标演化子区域初始闭合曲线的中心坐标.
3)通过对不同的原始声纳图像轮廓提取结果分析,验证了此方法在没有考虑水下目标形状规则程度的情况下,提高了轮廓提取的精度和计算速度,并且能准确地提取到目标高亮区和阴影区的轮廓,具有较好的适应性.
[1] 田晓东,刘忠,周德超.基于形状描述直方图的声呐图像目标识别算法系统[J].工程与电子技术,2009,29(7):1049-1052.
[2] LIANANTONAKIS M,PETILLOT Y R.Sidescan sonar segmentation using active contours and level set methods[C]//IEEE Oceans-Europe.Brest,France,2005:719-724.
[3] SANG Enfang,SHEN Zhengyan,FAN Chang,et al. Sonar image segmentation based on implicit active contours[C]//2009 IEEE International Conference on Intelligent Computing and Intelligent Systems.Shanghai,2009:228-231.
[4] 叶秀芬,王兴梅,门志国,等.改进的MRF水下目标检测方法研究[J].哈尔滨工业大学学报,2009,41 (7):682-685.
[5] LUMINITA A,CHAN T F.A multiphase level set framework for image segmentation using the mumford and shah model[J].International Journal of Computer Vision,2002,50(3):271-293.
[6] LI Canfei,WANG Yaonan,LIU Guocai.A new splitting active contour framework based on Chan-Vese piecewise smooth model[J].Acta Automatica Sinica,2008,34(6):659-664.
[7] BROX T,WEICKERT J.Level set segmentation with multiple regions[J].IEEE Transactions on Image Processing,2006,15(10):3213-3218.
[8] 郑世友.动态场景图像序列中运动目标检测与跟踪[D].南京:东南大学,2006.
[9] CAO Guo,MAO Zhihong,YANG Xin,et al.Optical aerial image partitioning using level sets based on modified Chan-Vese model[J].Pattern Recognition Letters,2008,29(4):457-464.
[10] MANSOURI,A R,KONRAD J.Multiple motion segmentation with level sets[J].IEEE Transactions on Image Processing,2003,12(2):201-220.
